1
Изобретение относится к области машиностроения и касается автооператоров для обслуживания металлорежущих станков.
Известен захват автооператора для обслуживания металлорежущих станков, содержащий щарнирно установленные на корпусе приводные губки, выполненные с возможностью продольного крепления заготовки 1.
Однако этот захват недостаточно надежен в работе, так как вследствие непараллельпости торцов заготовка устанавливается в патроне обслуживаемого оборудования с перекосом, т. е. не базируется по ее свободному торцу.
Целью изобретения является повышение надежности захвата в работе путем обеспечения установки заготовки в патроне обслуживаемого оборудования с базированием по ее свободному торцу.
Для этого в предлагаемом захвате автооператора корпус снабжен по меньшей мере одним упором, смонтированным с возможностью самоустановки по телесному углу и расположенным между губками.
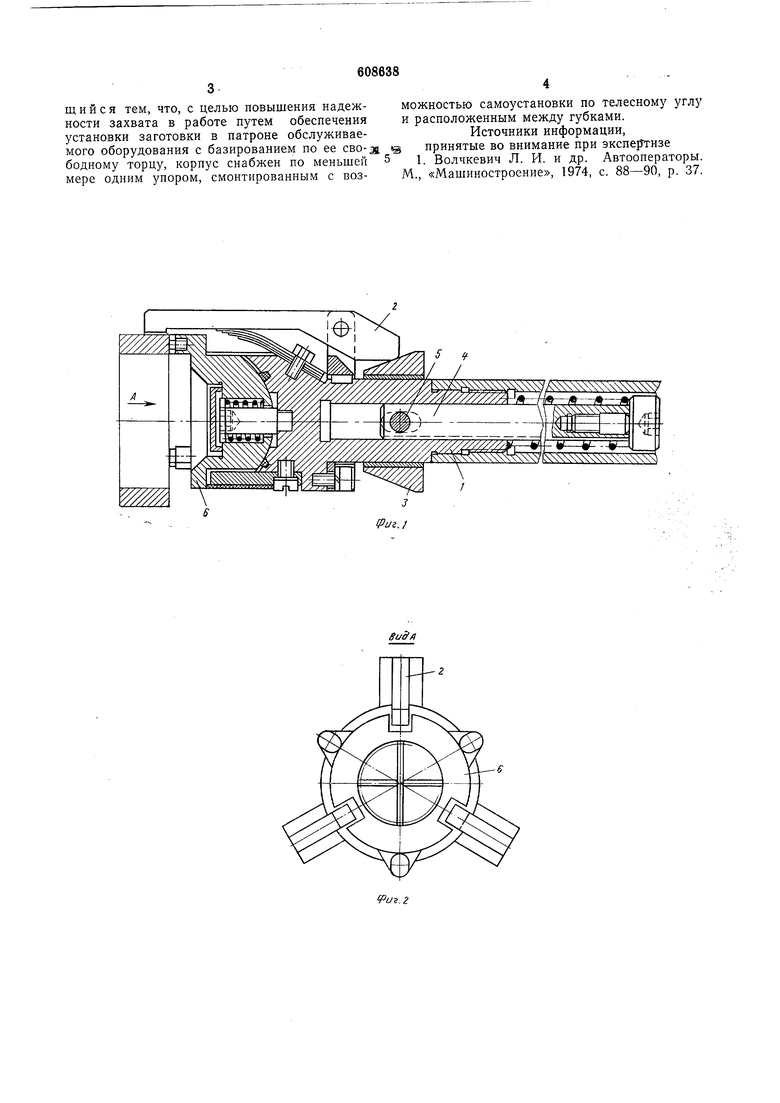
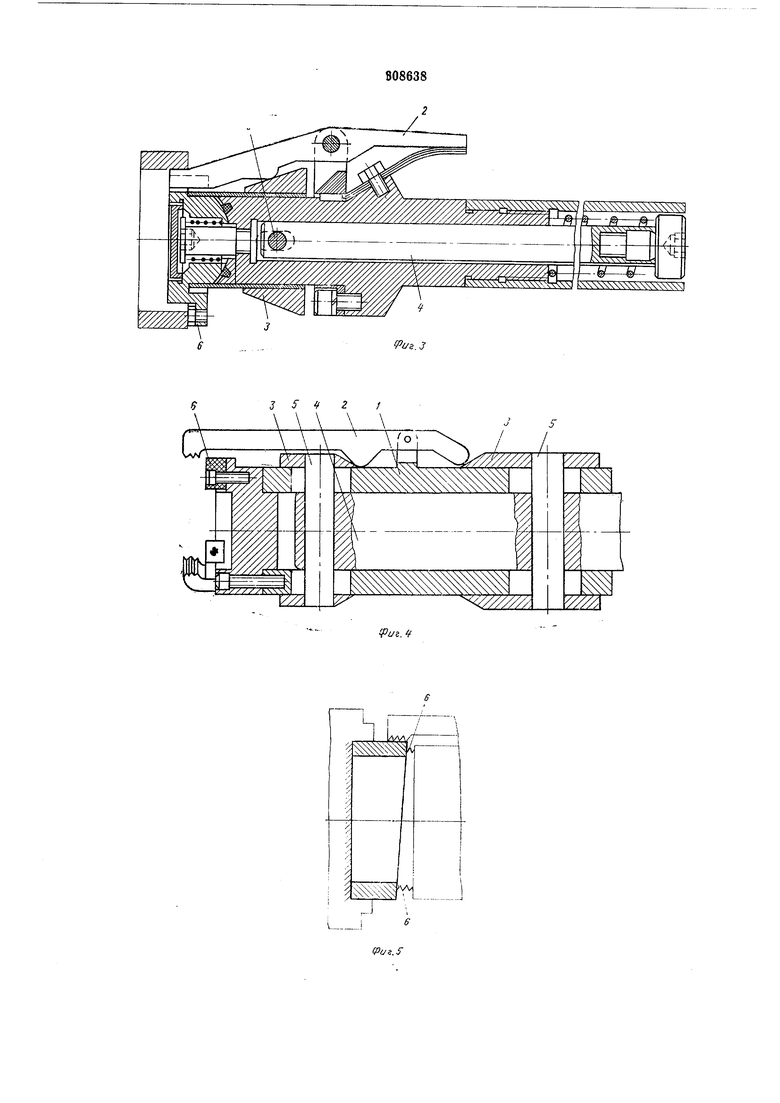
На фиг. 1 изображен предлагаемый захват автооператора; на фиг. 2 вид по стрелке А на фиг. 1; на фиг. 3 - общий вид, захват автооператора с несколькими упорами; на фиг. 4 - то же, с упорами из эластичного упругого материала; на фиг. 5 - схема, поясняющая работу захвата.
Захват автооператора содержит корпуе 1 с шарнирно установленными на нем губками 2, приводными от конусной втулки 3, установленной на корпусе 1 с возможностью продольного перемещения и жестко связанной со штоком 4 привода при помощи пальца 5. Корпус 1 снабл ен упорами 6, выполненными с возможностью самоустановки по телесно.му углу и расположенными между губками 2.
Захват автооператора работает следующим образом.
Вначале захват губками 2 забирает заготовку из магазина (не показан), осевым перемещением корпзса 1 переносит ее к патрону обслуживаемого оборудования, после чего губки 2 освобождают заготовку, которая упорами 6 поджимается к торцу патрона обслуживаемого оборудования, при этом непараллельный противоположный ее торец перекашивается относительно корпуса, а упоры б, самозстанавливаясь по телесному углу, фиксируют его положение. Затем заготовка зажимается в патроне, а захват совместно с автооператором возвращается в исходное положение.
Формула изобретения
Захват автооператора, содержащий щарнирно установленные на корпусе приводные губки, выполненные с возможностью продольного крепления заготовки, отличаю3
щийся тем, что, с целью повышения надеж- можностью самоустановки по телесному углу
Ь.ТГ:УоГ- :;™е oS, ;,,„.е
Ьо:г/о;иГ о;,,ггггг°„еГ.5;-.-, r ттт §rejLp.
мере ,« °™
608638 
| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимной патрон | 1989 |
|
SU1683882A1 |
| Захват манипулятора | 1981 |
|
SU963851A1 |
| Автооператор | 1986 |
|
SU1379055A1 |
| Автооператор | 1975 |
|
SU550270A1 |
| Автооператор | 1979 |
|
SU772808A1 |
| Автооператор | 1979 |
|
SU837755A1 |
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1569175A1 |
| АВТООПЕРАТОР МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 2005 |
|
RU2296039C2 |
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
| Манипулирующее устройство | 1982 |
|
SU1093544A1 |
S
