(54) ЗАХВАТ МАНИПУЛЯТОРА
Изобретение относится к машиностроению и может быть использовано в манипуляторах и автооператорах для обслуживания металлорежущих станков, например токарных, при обработке деталей типа втулок.
Известен захват манипулятора для деталей типа.втулок, содержащий цилиндрическую оправку с внутренним каналом для подвода сжатого воздуха, причем оправка снабжена опорным буртом, а выходные -сопла оправки расположены под углом к ее оси .
Недостатками этого захвата являются необходимость предварительной ориентации детали после обработки, невозможность перенастройки для захвата втулок различной длины, отсутствие жесткой фиксации втулок в радиальном направлении, что снижает производительность и надежность.
Цель изобретения - повышение производительности и надежности захвата.
Поставленная цель достигается тем, что захват снабжен силовым цилиндром, на штоке которого установлена дополнительно введенная зажимом губка, а корпус этого силового цилиндра установлен на оправке с
возможностью перемещения вдоль ее
оси.
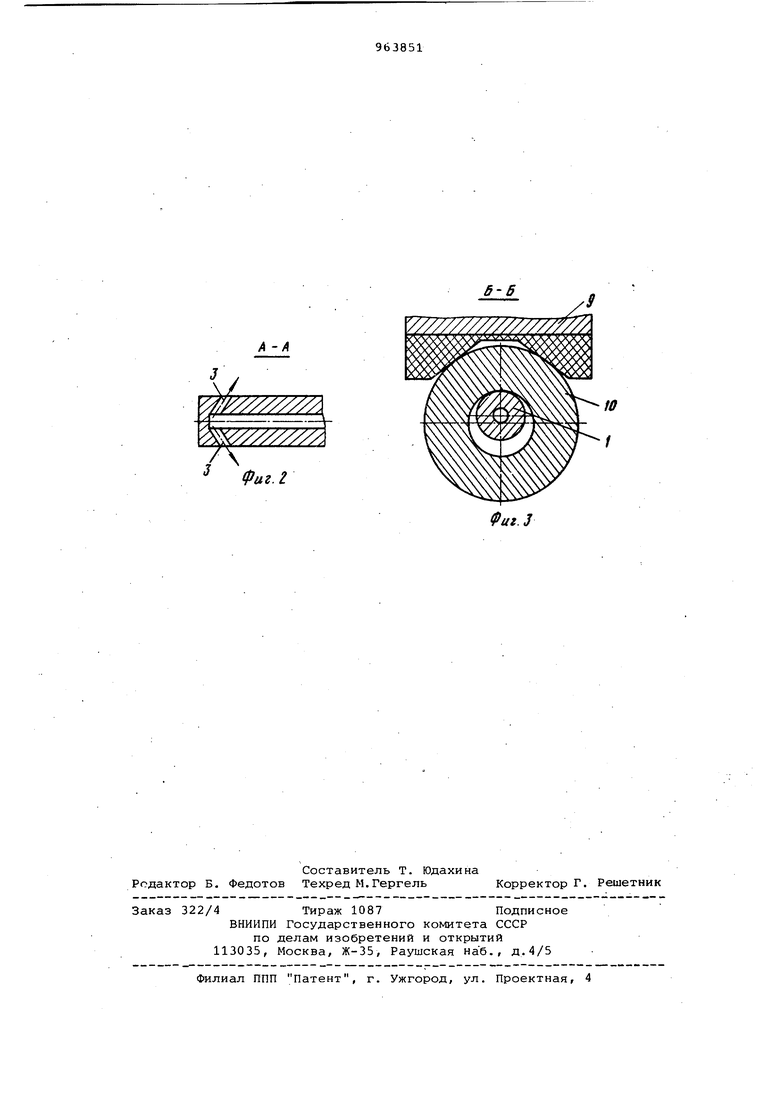
На фиг. 1 изображен предлагаекый захват; на фиг. 2 - разрез А-А фиг.1{ на фиг. 3 - разрез Б-Б фиг. 1 (положение захвата детали ).
В цилиндрической оправке 1 выполнен канал 2 для подвода сжатого воздуха. Выходной участок канала
10 выполнен в виде двух отверстий-сопел 3, расположенных под углом к оси оправки. На оправке при помощи винта 4 укреплен силовой цилиндр 5, содержащий поршень со UITOKOM 6 и пружину 7. В цилиндре выполнено отверстие 8
15 для подвода сжатого воздуха. На штоке жестко укреплена приводная губка 9 для захвата детали 10. Оправка 1 закреплена на транспортирующем орга20не 11 манипулятора при помощи винта 12.
Устройство работает следующим образом.
В исходном положении сжатый воздух поступает в канал 2 оправки 1
25 и в полость силового цилиндра 5 через отверстие 8. Поршень со штоком 6, сжимая пружину 7, перемещает приводную губку 9 в крайнее положение, открывая захват. Оправку вводят в
30 отверстие детали 10, которую отрезают резцом 13 от зажатой в патроне 14 токарного станка вращающейся заготовки 15. Оправку в отверстие детали вводят до положения, при котором отверстия-сопла 3 оказываются за левым торцом детали. После от резания детали от заготовки струи .сжатого.воздуха, вытекающего из отверстий-сопел 3, начинают действова на левый торец детали. Переместившись под действием струй вправо, деталь прижимается к наружной поверхности силового цилиндра 5. После этого сжатый воздух через отверс тие 8. стравливается из цилиндра. Разжимаясь, пружина 7 перемещает поршень со штоком б и зажимную губку 9, которая прижимает 10 к оправке 1. После переноса детали на рабочую позицию и ее установки либо в патрон токарного станка на следующую операцию, либо после разворота захвата в приемную тару, сжа тый воздух перестает поступать в канал 2 и одновременно подается через отверстие 8 в полость цилиндра Поршень со штоком 6 перемещают зажимную губку 9 от детали,.раскрывая захват, который затем выводится на исходную позицию. Перенастройка .устройства.на захват втулок различной длины осуществляется перемеще-нием цилиндра 5 вдоль оправки 1. Применение предлагаемого устройства при обслуживании токарных стан
всзЗух ков позволяет сократить затраты времени на предварительную ориентацию детали после обработки, осуществить быструю переналадку при захвате втулок различной длины, обеспечить жесткую фиксацию втулок в радиальном направлении при минимальном количестве захватных органов, т.е. повысить производительность и надежность. Формула изобретения Захват манипулятора для деталей типа втулок, содержащий цилиндрическую оправку с внутренним каналом для подвода сжатого воздуха, причем оправка снабжена опорным буртоМ, а выходные сопла канала оправки расположены под углом к ее оси, о т ли чающийся тем, что, с целью повышения его производительности и надежности он снабжен силовым цилиндром, на штоке которого установлена дополнительно введенная зажимная губка, а корпус цилиндра установлен на оправке с возможностью перемещения вдоль ее оси. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 447243, кл. В 23 Q 7/04, 1974.
б-В
/////////////////
А -А
7/ уУу777//.
$ 6 7777у 7УА фиг. г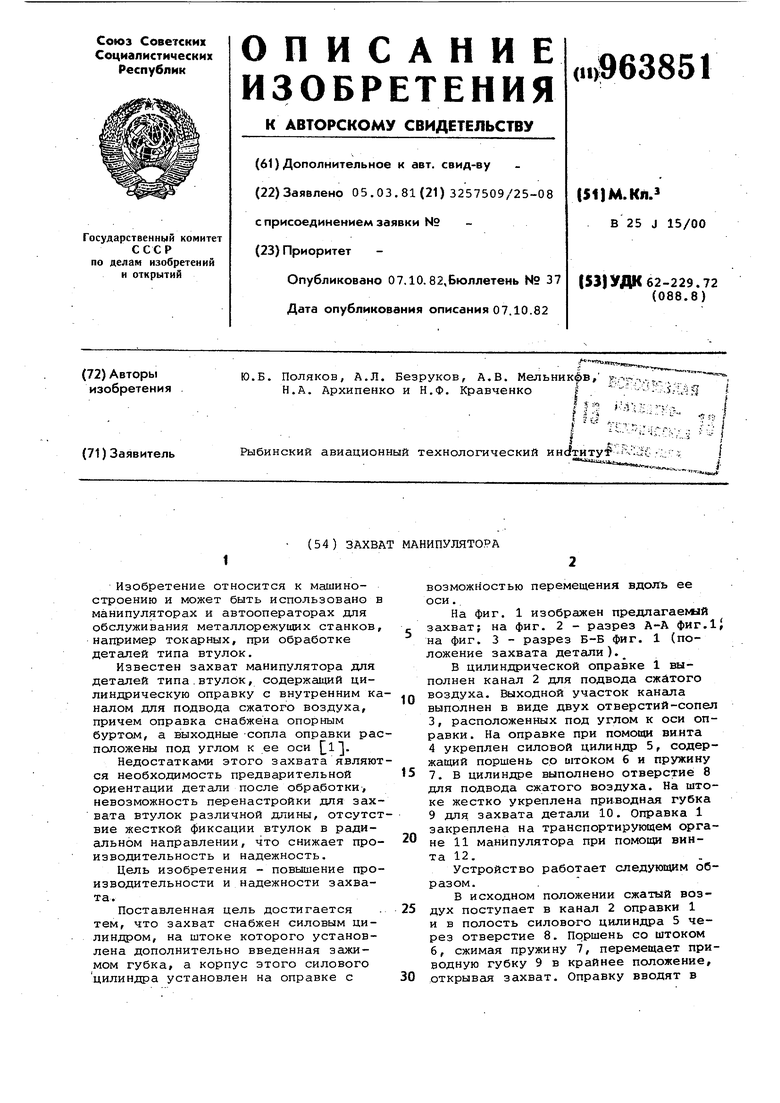
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1984 |
|
SU1255426A1 |
| Сборочная резьбозавертывающая головка | 1980 |
|
SU921756A1 |
| Схват робота | 1982 |
|
SU1024271A1 |
| Схват промышленного робота | 1988 |
|
SU1830344A1 |
| Автооператор | 1986 |
|
SU1379055A1 |
| Захватное устройство | 1988 |
|
SU1502298A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захват | 1977 |
|
SU663577A1 |
| Схват манипулятора | 1984 |
|
SU1301696A1 |