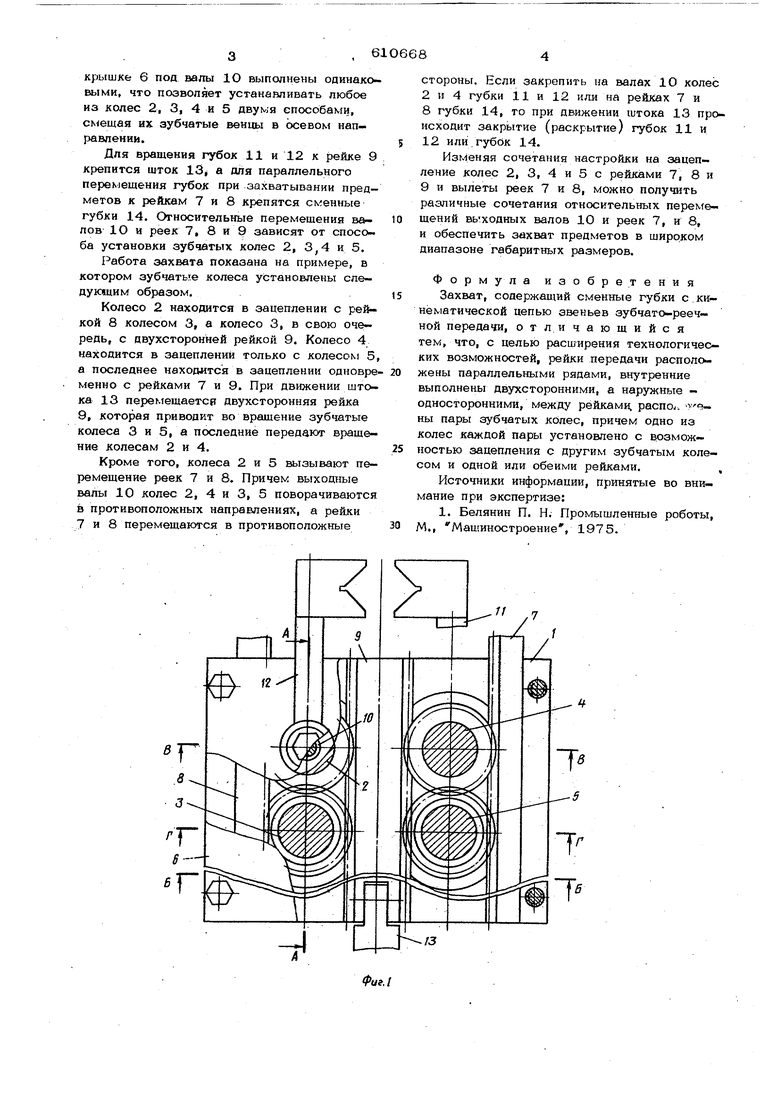
крышке 6 под валы 1О выполнены одинакои 1ми, что позволяет устанавливать любое из колес 2, 3, 4 и 5 двумя способами, смещая их зубчатые венцы в осевом направлении.
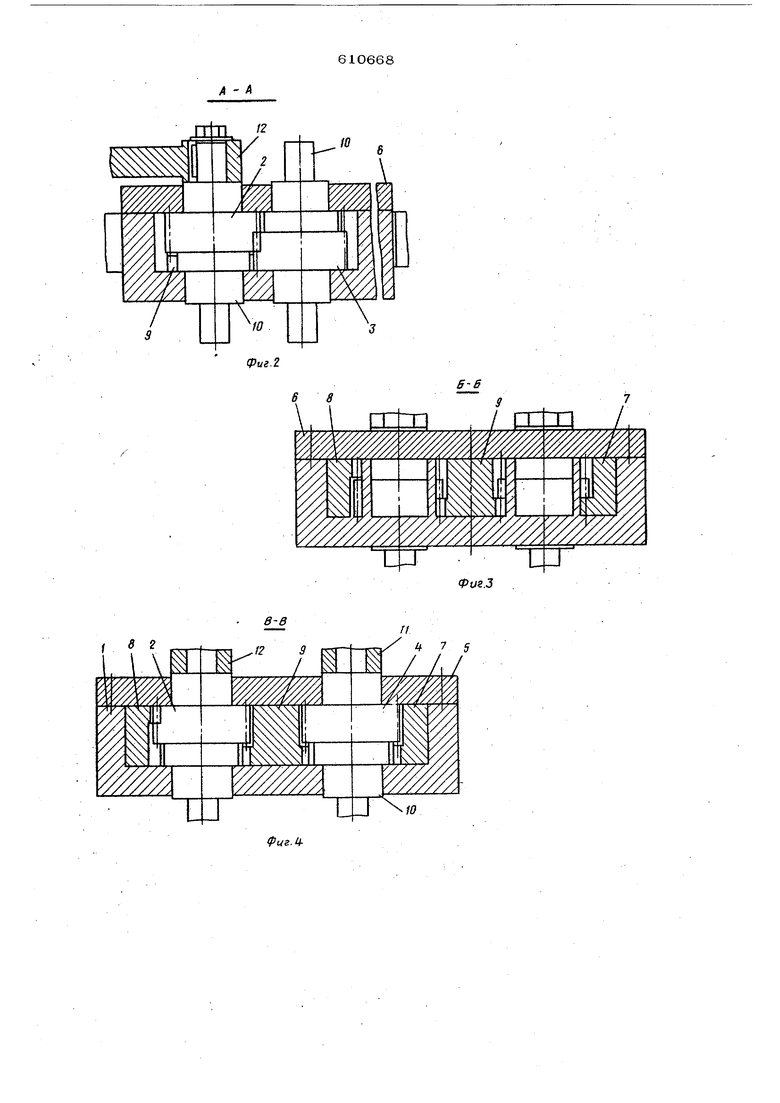
Для вращения губок 11 и 12 к рейке 9 крепится шток 13 а для параллельного перемещения губрк при захватывании предметов к рейкам 7 и 8 крепятся сменные губки 14. Относительные перемещения валов 10 и реек 7, 8 и 9 зависят от способа установки зубчатых колес 2, 3,4 и 5. Работа захвата показана на примере, в котором зубчатые колеса установлены следующим образом,
Колесо 2 находится в зацеплении с рейкой 8 колесом 3, а колесо 3, в свою очередь, с двухсторонней рейкой 9. Колесо 4 находится в зацеплении только с колесом 5 а последнее находится в зацеплении одновре менно с рейками 7 и 9. При движении штока 13 перемещаетср двухсторонняя рейка 9, которая приводит во вращение зубчатые колеса 3 и 5, а последние передают вращение колесам 2 и 4.
Кроме того, колеса 2 и 5 вызывают перемещение реек 7 и 8. Причем выходные валы 10 колес 2, 4 и 3, 5 поворачиваются в противоположных направлениях, а рейки 7 и 8 перемещаются в противоположные
стороны. Если закрепить на валах 10 колес 2 и 4 губки 11 и 12 или на рейках 7 и
8губки 14, то при движении штока 13 происходит закрытие (раскрытие) губок 11 и 12 и ли. губок 14.
Изменяя сочетания настройки на зацепление колес 2, 3, 4 и 5 с рейками 7, 8 и
9и вылеты реек 7 и 8, можно получить различные сочетания относительных перемещений выходных валов 10 и реек 7, и 8,
и обеспечить захват предметов в широком диапазоне габаритных размеров.
Формула изобретения
Захват, содержащий сменные губки с кинематической цепью звеньев зубчато-реечной передачи, отл.ичающийся тем, что, с целью расширения технологических возможностей, рейки передачи расположены параллельными рядами, внутренние выполненьг двухсторонними, а наружные - односторонними, между рейкамц, распо. Уены пары зубчатых колес, причем одно из колес каждой пары установлено с возможностью зацепления с другим зубчатым колесом и одной или обеими рейками.
Источники информации, принятые во внимание при экспертизе:
1. Белянин П. Н, Промышленные роботы, М., Машиностроение, 1975.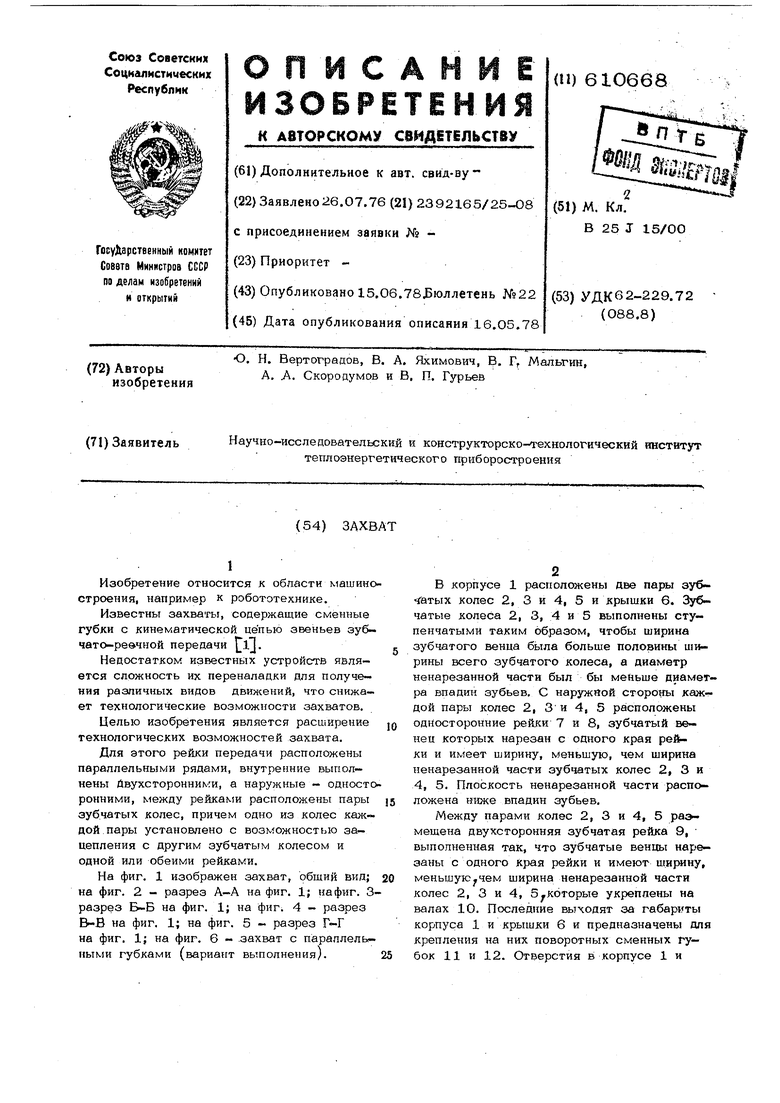
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Захват промышленного робота | 1980 |
|
SU887157A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Захват автооператора | 1989 |
|
SU1713798A1 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Манипулятор | 1988 |
|
SU1593948A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Магнитный схват | 1986 |
|
SU1430283A1 |
| Схват манипулятора | 1985 |
|
SU1265043A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
8-В
1 г
в 8 3
fus.5
