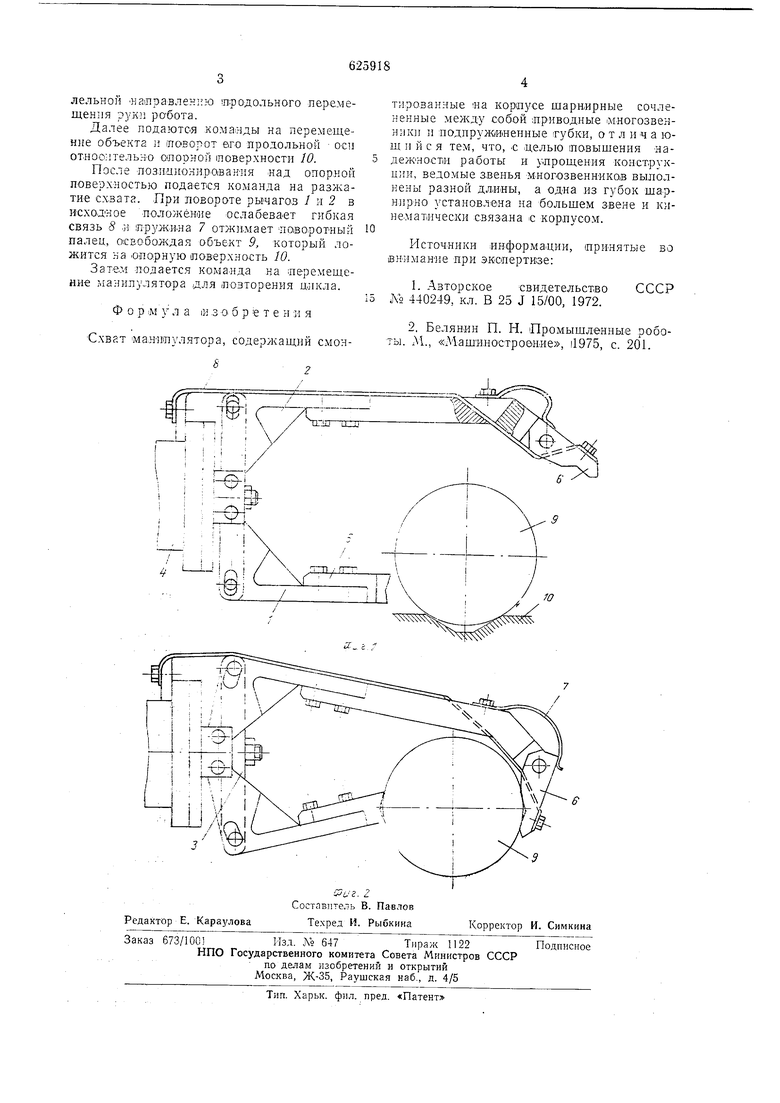
Изобретение относится к области машль ностроения, а именно, кМалиеуляторам для механизации водам or а тельных и основных олераций технологических лроцессов, налрнмер, ири горячей объемной штамповке и др. Известен схват манипулятора, дредназначенного для мехализадии вспомогательных и основных операций, в котором содержатся шарнирные многозвеннлки I. Недостатками сх1вата являются сложность его конструкции, значительные габариты и .Miacca. Наиболее близким решением к известному является схват, в которо.м содержатся смолиированлые «а корпусе шарнирные сочлененные между собой лриводные многозвентаики и подтружилеллые губки 2. Такой схват ненадежен гВ работе л имеет сложную колструкцию. Цель изобретения - иовышение надежности работы и упрощение колструкции схвата. Указалиая достигается тем, что аедомы-е звенья м.ногозвенников вылолнены р1азной длины, а одна из -губок шарнирло усталовлела на большем звене и кияематически связала :С корпусом. . На фиг. 1 схематично локаза-к схват в исходном лоложении; ла фиг. 2 - то же, в рабочем положели. Схват манипулятора содержит смонтированные на корпусе Шарнирные сочлененные между собой лриводные. млогозвелники, поворотные Г-образные ведомые звелья / и 2 которых выполнены с возможностью перемеш,ения в куллсе 3 от пр|И|Вода, например, силового цилиндра 4. Ведомые звенья / и 2 имеют разлую длину. Губка 5 закреплена на меньшем звене , а губка 6 шарни.рло установлела ,на большел звене 2 л подпрул инена к нем}- лрулхиной 7. Конец губки 6 кинематически связал с корпусом, например, гибкой упругой -связью 8. Схват .манипулятора работает следующим образом. При подходе к цилиндрическому объекту 5, продольная ось которого перпендикулярна к опорной ловерхности, подается команда ла захват. При этом пр.ивод 4 через кулису 3 поворачивает рычаги схвата 1 и 2. При повороте рычага 2 натягивается гибкая упругая связь S и поворачивает лодпружиненную губку 6, установлеплую иа колце звена 2, до взаимодействия с объекТ01М 9. Взаимодействие губок 5 И 6 схвата происходит ло оси слчатия объекта, ларал
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Схват манипулятора | 1985 |
|
SU1294605A1 |
| Схват манипулятора | 1983 |
|
SU1166988A1 |
| Схват манипулятора | 1981 |
|
SU1030156A1 |
| Стержневой манипулятор | 1990 |
|
SU1726236A1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| Схват манипулятора | 1986 |
|
SU1342726A1 |
| Схват промышленного робота Саблина В.П. | 1982 |
|
SU1060470A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
