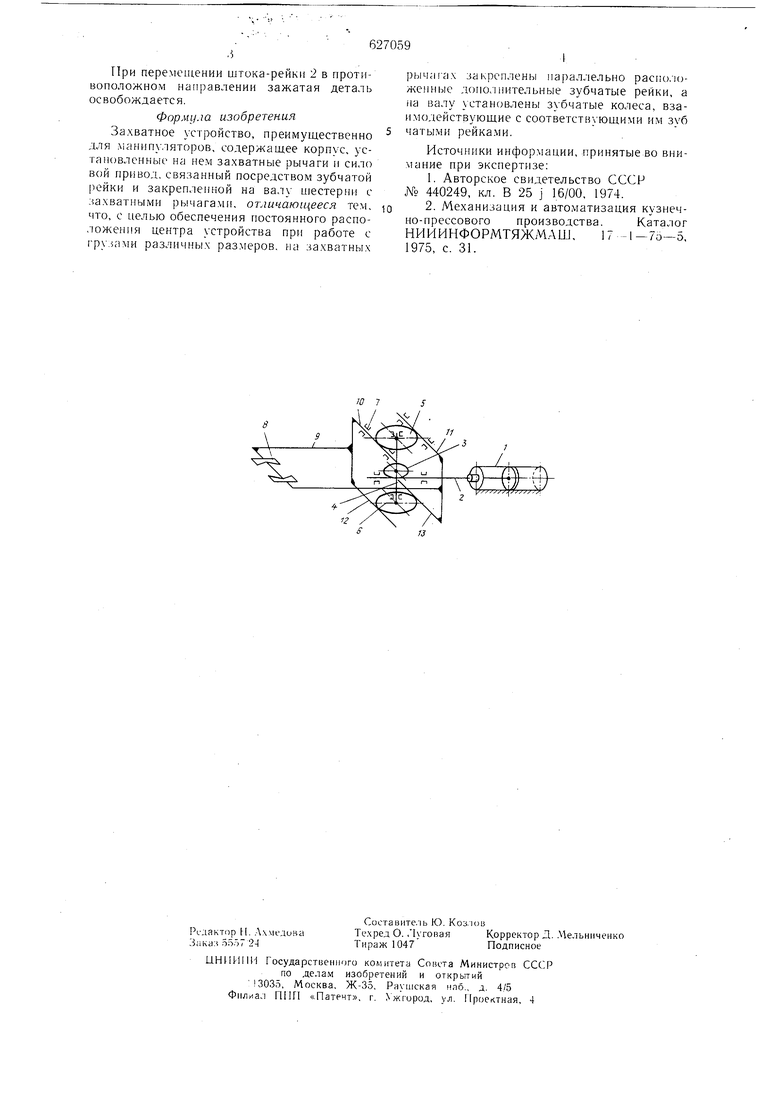
Изобретение относится к об/шсти грузозахватных устройств, используемых, в частности в комплексе с манипуляторами. Известно грузозахватное устройство, содержащее корпус с установленными на нем захватными органами, снабженными силовым приводом 1. Однако это устройство сложно по конструкции и не обеспечивает -необходимой точности установки груза. Наиболее близким к описываемому является захватное устройство, содержащее корпус, установленные на нем захватные рычаги и силовой привод, связанный посредством зубчатой рейки и закрепленной на валу щестерни с захватными рычагами 2. Недостатком этого устройства является невозможность обеспечить постоянное расположение центра тяжести устройства при работе с грузами различных размеров, что не позволяет точно установить их на заданное место. Целью изобретения является обеспечение постоянного расположения центра устройства при работе с грузами различных размеров. Для этого на захватных рычагах закреплены параллельно расположенные дополнительные зубчатые рейки, а на ва,1 установлены зубчатые колеса, взаимодействующие с соответствующими им зубчатыми рейками. На чертеже изображена схема захватного устройства. Устройство содержит силовой цилиндр I, на щтоке которого имеется рейка 2, взаимодействхющая с шесте,ией 3, закрепленной на валу 4, На том же валу смонтированы зубчать1е колеса 5 и 6. Шестерня 3 и зубчатые колеса 5 и 6 размещены в корпусе /. Зажимные губки 8 смонтированы на рычагах 9, свободные концы которых выполнены вильчатыми со смонтированными на них зубчатыми рейками 10-13, находящимися в зацеплении соответственно с зубчатыми колесами 5 и 6. Зубчатые рейки 10-13 расположены параллельно друг другу. Работа захвата осхществ.тяется следующим образом. Нри перемещении щтока-рейки 2 щестерня 3 поворачивается против часовой стрелки; в том же направле1Н1и поворачиваются и зубчатые колеса 5 и 6, перемещая рейки 10-13 навстречу друг другу. При этом захватывается груз любого диамет ра, и обеспечивается постоянное расположение центра устройства.
При перемещении штока-рейки 2 в противоположном направлении зажатая деталь освобождается.
Формула изобретения
Захватное устройство, преимущественно для .манипуляторов, содержащее корпус, установленные на нем захватные рычаги н сило вой привод, связанный посредством зубчатой рейки и закрепленной на валу щестерни с захватнымн рычагамн, отличающееся те.м, что, с нелыо обеспечения постоянного расположения центра устройства при работе с гру.5лми различных размеров, на захватных
рычагах закреплены параллельно расположенные дополнительные зубчатые рейки, а на валу установлены зубчатые колеса, взаимодействующие с соответств ющими им зуб чатыми рейками.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство CCCF jYo 440249, кл. В 25 j 16/00, 1974.
2.Механизация и автоматизация кузнечно-прессового производства.Каталог НИИИНФОРМТЯЖМАШ, 17-1-70-5, 1975, с. 31.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Устройство для подачи бортовых крыльев к барабану для сборки покрышек пневматических шин | 1979 |
|
SU845345A1 |
| Вакуумное захватное устройство | 1982 |
|
SU1049405A1 |
| Устройство для подачи поддонов | 1980 |
|
SU899391A1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Грузозахватное устройство | 1982 |
|
SU1071564A1 |
| Захват | 1980 |
|
SU905061A1 |
| Магнитное грузозахватное устройство | 1989 |
|
SU1763341A1 |
| Устройство для передачи изделий между конвейерами,расположенными на разных высотных уровнях | 1981 |
|
SU998255A1 |
| Захватное устройство для грузов с цапфами | 1985 |
|
SU1316972A1 |
ЭЕ
