ся фазовый сигнал соответственно по оси X и по оси У.
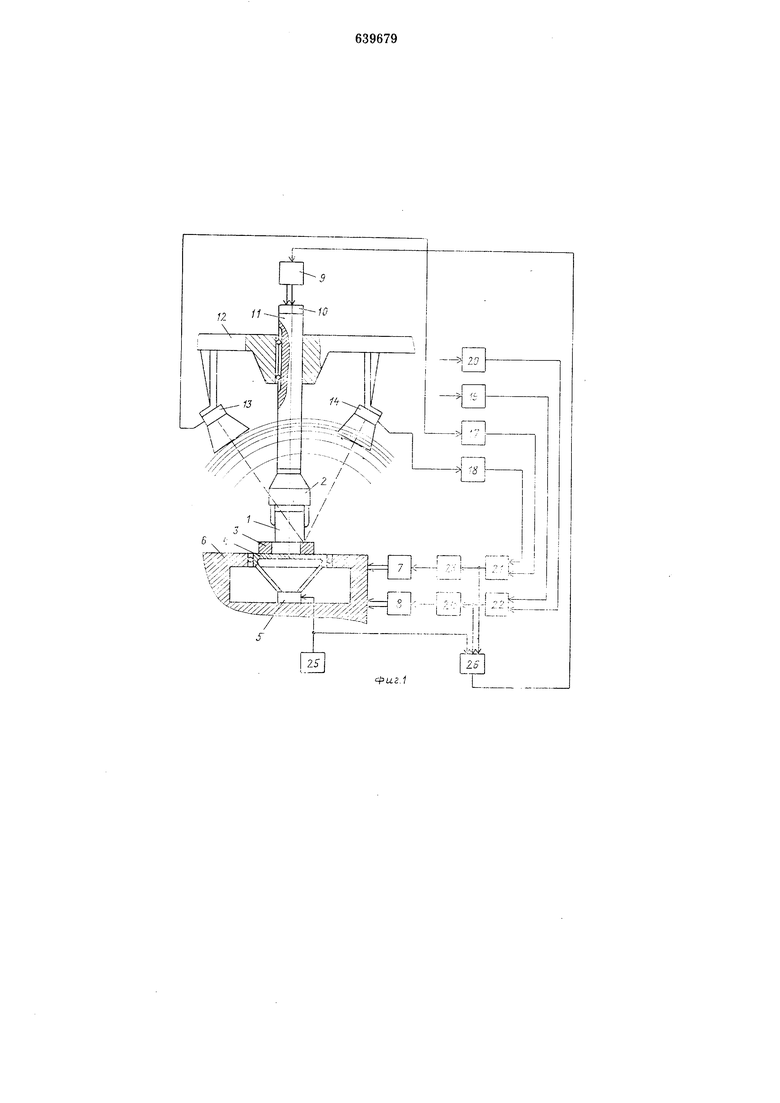
Фазоимпульсные преобразователи 21 и 22 связаны с устройством управления 23 и 24 соответственно, которые управляют исполнительнымн механизмами 7 п 8.
Вибратор 5 питается панряжениеы, вырабатываемым генератором 25. Устройство 26 служит для определения момента выхода деталей в положение сборки. Этот момент устанавливается но сигналам с выходов нреобразователей 21 и 22. В положении сборки выходные сигналы преобразователей 21 и 22 равны нулю при работающем вибраторе 5.
Предложенное устройство работает следующим образом.
Вал 1 зажимается в охвате 2 и опускается до соприкосновения его торца с торцом втулки 3, предварительно укрепленной на сборочном столе 4. Опускание вала осуществляется исполнительным механизмом 9. Включается генератор 25, который питает вибратор 5. Вибратор 5 приводит стол 4 с втулкой 3 в колебания малой амплитуды вдоль осей собираемых деталей.
В результате этого торцы вала 1 и втулки 3 приходят в кратковременные и неинтенсивные ударные соприкосновения, возникают звуковые акустические сигналы, расиространяющиеся от места соударения. Эти сигналы достигают микрофонов.
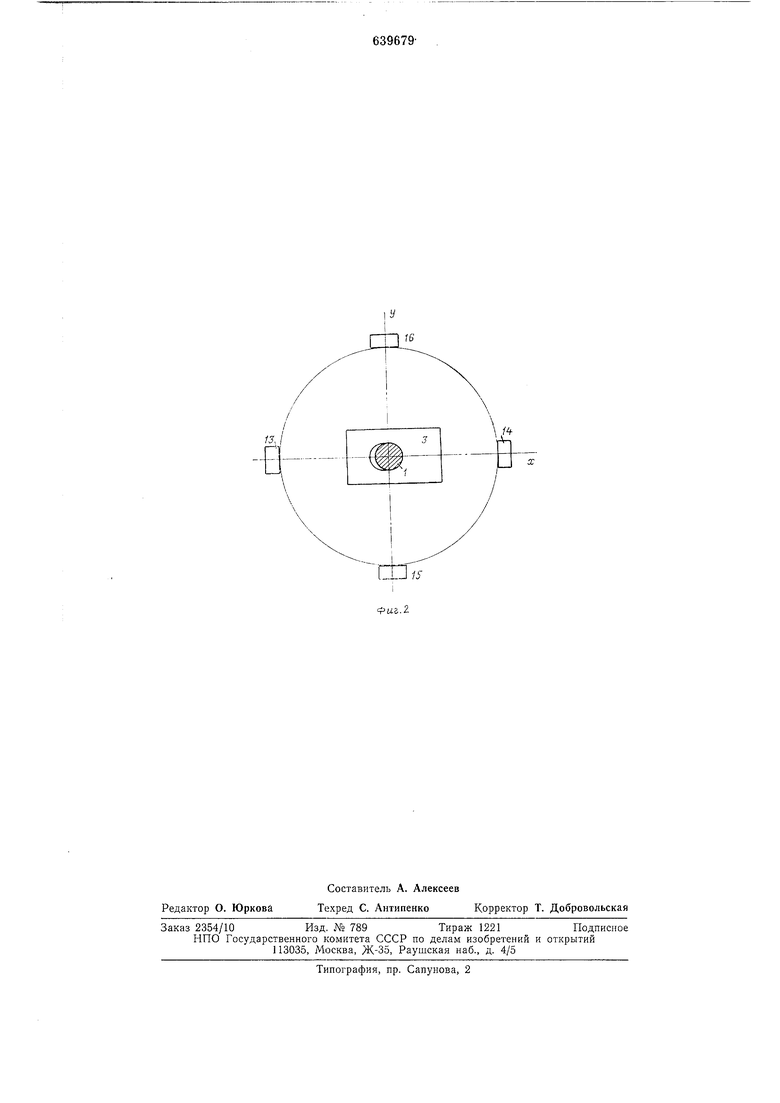
Рассмотрим процесс совмещения деталей 1 и 3 только вдоль оси X. Совмещение вдоль оси У, а также совмещение вдоль обеих осей нротекает аналогично.
В микрофонах происходит преобразование звуковых сигналов в электрические сигналы. В положении, изображенном на фиг. 1, звуковая волна достигает первым микрофона 14, так как расстояние от точки со дарення до микрофона 14 меньше, чем до микрофона 13. Соответственно этому преобразователь 21 формирует па своем выходе сигнал определенной фазы и величины. В случае, когда микрофон 14 первым фиксирует сигна,г (ири смепл,ении вту.чки 3 влево относительно вала 1), фаза выходного сигнала с нреобразователя 21 условно имеет ноложительный знак, а когда первым сигнал фиксирует микрофон 13 - фаза условно
имеет отрицательный знак. Величина длительности выходных сигналов преобразователя 21 характеризует величину смещения деталей вдоль оси .X.
В положении, изображенном на фиг. 1, выходно си)-нал и.меет положительный знак фазы. Устройст1Ю управления 23 по данному сигналу, унравляя исполнительным механизмом 7, приводит в движение координатный механизм 6 в сторону умепьшеиия смещения осей вала 1 и втулки 3.
В положении совмещения этих осей звуковые сигналы достигают микрофонов 13 и 14 одновременно. Поэтому выходной сигнал на иреобразователе 21 стаиовится равен нулю, и иснолнительный механизм 7 останавливается.
Этот момеит фиксируется устройством 26 (устройство логического умножения). При наличии также иулевого сигнала с преобразователя 22 уетройство 26 включает механизм 9, обеспечивающий сопряженне деталей.
При смещении втулки 3 в противоположном направлении работа устройства аналогична.
Формула изобретения
1.Устройство совмещения деталей при сборке, содержащее основание, базу для , схват д.ля валов и орган возбуждеиия продольных колебаний, отличающееся тем, что, с целью расширения эксплуатационных возможностей и расширения номенклатуры собираемых без нереналадки деталей, у схвата симметрично и диаметрально противоположно последнему размещены приемники акустических сигналов, соединенные попарно через усилители и фазоимпульсные преобразователи с исполиительными механизмам - совмещения и сборки.
2.Устройство но п. I, о т/1 п ч а К) ще е с я тем, что приемники выполнены в виде микрофонов.
Источники информации, принятые во внимание нри экснертизе 1. ЯХИМОБИЧ В. А. Ориентирующие механизмы сборочных автоматов. М., «.Иашиностроепие, 1975, с. 66-67.
.I
m/i
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для относительного ориентирования деталей | 1977 |
|
SU707758A1 |
| Сборочное устройство | 1978 |
|
SU751566A1 |
| СПОСОБ СБОРКИ ДЕТАЛЕЙ ВАЛ-ВТУЛКА | 2013 |
|
RU2542201C2 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ДЕТАЛЕЙ | 1992 |
|
RU2022751C1 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1414624A1 |
| СПОСОБ СБОРКИ СОЕДИНЕНИЙ ТИПА "ВАЛ-ВТУЛКА" | 2008 |
|
RU2381095C1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Устройство для управления сборочным манипулятором | 1987 |
|
SU1495117A1 |