Иэобрегенне огносигся к грузозахватным усгррйсгвам. Иавесгно захватное устройство, содер жащее траверсу с усгановпенными на ней поворотными рычагами, снабженными винтовым приводом flj .Это устройство не обеспеннвает захвата длинномерных плоских изделий. Известно устройство, содержащее траверсу с установленными на ней захватными рычагами, снабженными гидравлическим приводом 21 . Это устройство также не может использоваться для выполнения сложных технологических операций с длинномерными грузами. Наиболее близким к описываемому устройству является.захватное устройство, содержащее траверсу с основанием и боковыми стенками, установленными на ней посредством осей пары захватных рычагов, каждый из которых имеет верхние и нижние плечи, и силовой привод рычагов 3J . Недостатками этого устройства являются невоа 1ожность последовательного выполнения технологических операций с изделиями и их точной установки. Цель изобретения - повышение эффективности работы устройства за счет точной установки изделия без выполнения дополнительных операций и обеспечение заданной последовательности поворота рычагов при их разведении. Для этого верхние плечи каждой пары рычагов имеют разную длину, а на боковых стенках траверсы установлены жест кий упор, взаимодействукяций с длинным верхним плечом одного рычага, и подпружиненный упор, взаимодействующий с коротким верхним плечом другого рычага. При этом на основании траверсы может быть закреплен фиксатор, взаимодействующий с коротким верхним плечом ры4arai а отношение длинного и короткого верхних плеч, в каждой паре рычагов ра&но или больше 1,1.
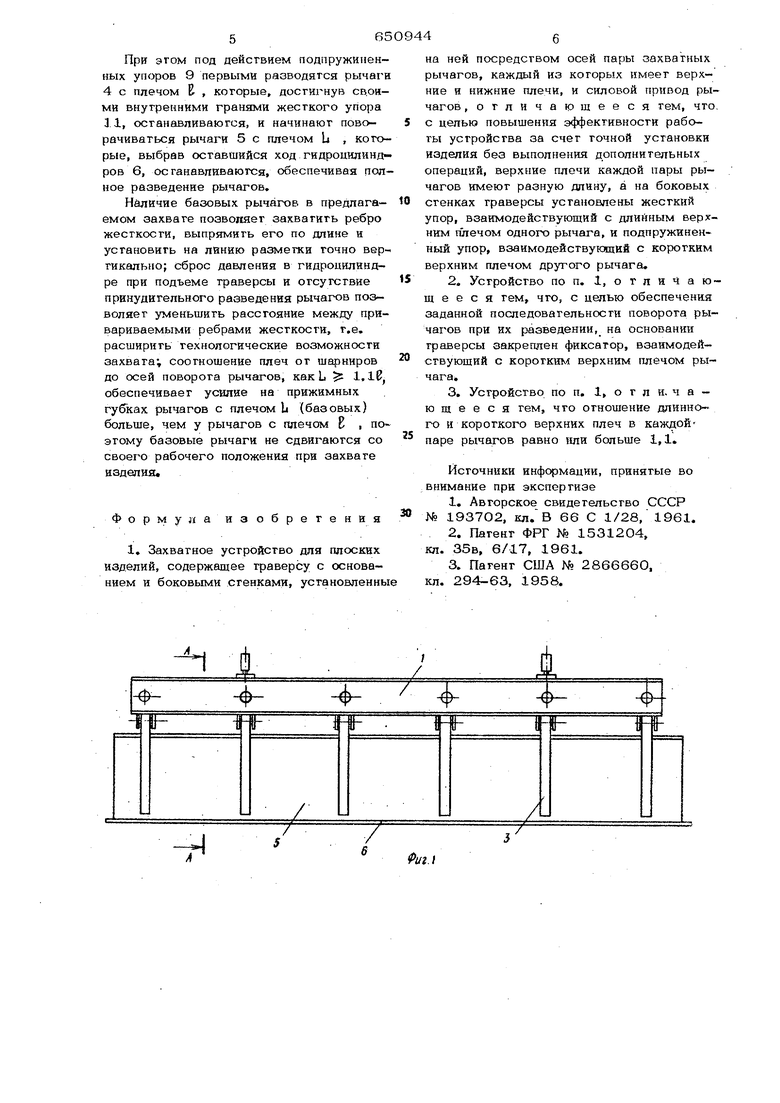
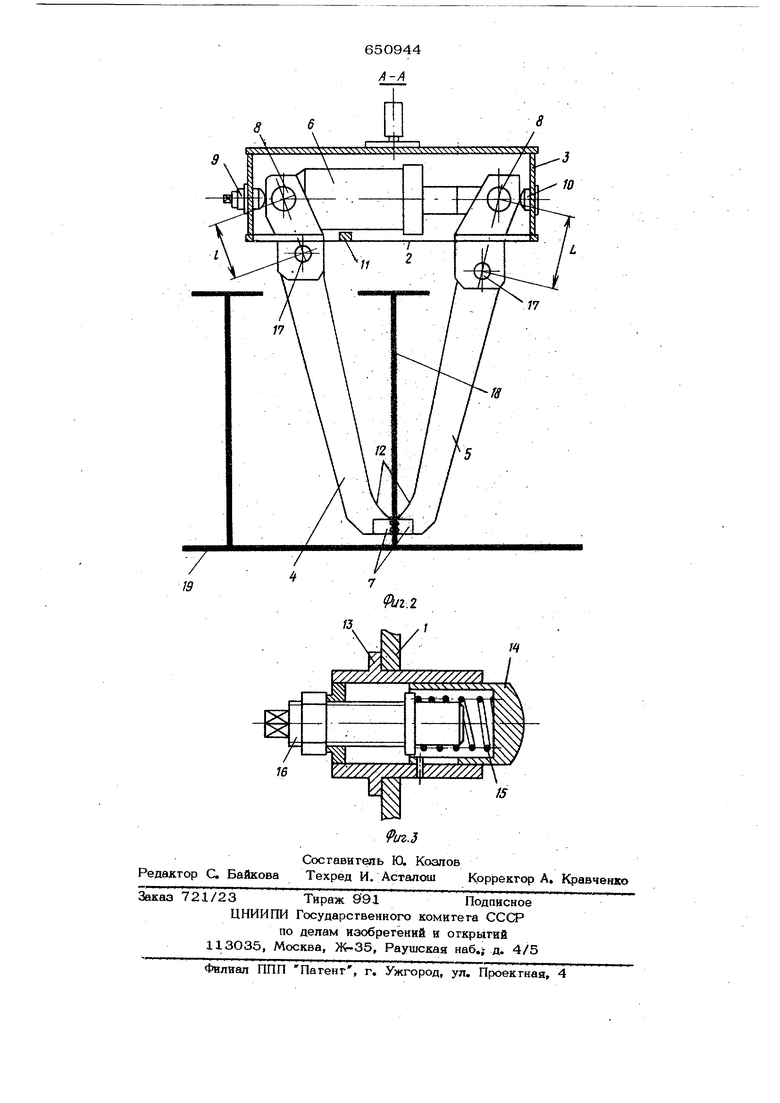
На фиг. 1 изображвг обишй вид захватного усгройсгва; на фиг. 2 разрез А-А на фиг, 1; на фиг, 3 - подпружиненный упор.
Захватное устройство состоит из траверсы 1 с основанием 2 и боковыми сгенками 3. На траверсе шарнирно установлены рычаги 4 и 5 и силовые приводы 6(гидроцилиндры), .управляющие ими. На концах рычагов закреплены ки 7, Корпуса гидроцилиидров шарнирно соединены с рычагами, имеющими плечо поворота И , а штоки гидроцилиндров шарнирно соединены с рычагами, имеющи ми плечо поворота L , причем L 1ДЕ . Шарниры представляют собой оси 8, проходящие сквозь отверстия и-рычагах и проушинах корпусов гидроцилиндров.
Для захвата ребра жесткости всеми парами рычагов и точной вертикальной установки его на линию разметки на полотнище один ряд рычагов является базовым и досгигает рабочего положения раньше другого ряда рычагов.
Если выставить рычаги таким образом чтобы в рабочем положении их зажимные губки находились в одной вертикальной плоскости, проходящей через линию раэметки на полотнище, то такие рычаги считаем базовыми. Ими являются рычаги с плечом поворота U .
На одной боковой стенке траверсы 1 . закреплены подпружиненные упоры .9,- усилие пружин которых действует на рычаги 2 с плечом . В , входящие в контакт с этими упорами. На другой стенке траверсы установлены жесткие упоры Ю, в которые упираются при сведении рычаги 3 с плечом U . На основании 2 траверсы с внутренней стороны рычагов с плечом Е расположены жесткие упоры 11, ограничивающие поворот рычагов при их разведении. Внутренние грани 12 рычагов на своих захватывающих концах имеют плавную кривизну для скольжения и огибания рычагами изделия.
Подпружиненные упоры 9 представляют, собой прикрепленные к одной боковой стенке траверсы 1 стаканы 13, в которых скользят плунжеры 14. Усилие, с которым упоры действуют на рычаги 2, регулируется пружинами 15 вращением хвостовика оси 16, Оьи поворота 17 рычагов проходят сквозь ушки, приваренйые к траверсе.
Захват предназначен для перехвата с известного устройства ребра жесткости 18, его выпрямления, подачи в зону силевого обжатия с полотнищем .19 и точной вертикальной установки ребра кесткости на линию разметки.
Работа захватного устройс1 ва происходит Следующим образом,
Изделие подается в зону работы захвата. Траверса 1 с разведенными рычагa IИ 4 и 5 опускается и останавливается в нужном положении над изделием, Затем с пульта управления приводятся в действие гидроцилиндры 6. При подаче рабочей жидкости в гндроцилиндры начинают перемещаться как их штоки, гак и корпуса. Так как корпуса при своем перемещении испытывают противодействие со стороны пружин упоров 9, то раньше достигнут рабочего положения рычаги 3 с плечом Ь . Достигнув жестких- упоров 10, эти рычаги займут рабочее положение, касаясь зажимными губками 7 стенки изделия. Корпуса 1гздроцилиндров, преодолевая сопротивление пружин упоров 9, достигнут такого положения, при котором рычаги 4, шаркирно соединенные с корпусами гидроцилиндров, прижмут своими зажимными губками изделие к рычагам 5;
Разные плечи поворота рычагов (от шарниров 8 до осей поворота 17) обеспечивают разные усилия на зажимных губках 7, поэтому рычаги с большим плечом L , достигающие рабочего положения раньше рычагов с плечом В , имеют большее усилие на своих прижимных концах и не сдвигаются при прижатии к ним ребра жесткости рычагами с меньшим плечом t ,
Затем траверса 1с захваченным ребром жесткости перемещается вниз и устанавливает ребро жесткости на линию разметки на полотнище 19, после чего происходит обжатие известным механизмом ребра жесткости с полотнищем.
После обжатия ребра жесткости развести сразу рычаги 4 и 5 в стороны нельзя, так как рядом может находиться приваренное ранее ребро жес.ткости, а также потому, что при повороте рычагов они, двигаясь по окружности, могут упереться в полотнище 19, поэтому вначале сбрасывается давление в гидроцилиндрах 6, и затем траверса 1 перемещается вверх. При подъеме траверсы рычаги скользят и огибают своими внутренними гранями 12 прижатое к полотнищу изделие и после окончания подъема траверсы разводятся в стороны по сигналу с пульта управления. При этом под действием подпружиненных упоров 9 первыми разводятся рычаги 4 с плечом В , которые, достигнув св.онми внутренними гранями жесткого упора 31, останавливаются, и начинают поворачиваться рычаги 5 с плечом Ь , которые, выбрав оставшийся ход гидроцилиндров 6, останавливаются, обеспечивая пол ное разведение рычагов. Наличие базовых рычагов в предлагаемом захвате позвоияет захватить ребро жесткости, выпрямить его по длине и установить на линию разметки точно вертикально; сброс давления в гидроциливдре при подъеме траверсы и отсутствие принудительного разведения рычагов позволяет уменьшить расстояние между привариваемыми ребрами жесткости, т.е. расширить технологические возможности захвата; соотношение плеч от шарниров до осей поворота рычагов, как L 5 l.lK, обеспечивает усилие на прижимных губках рычагов с плечом Ь (базовых) больше, чем у рычагов с плечом В i поэтому базовые рычаги не сдвигаются со своего рабочего положения при захвате изделия. Формулаизобретения 1, Захватное устройство для плоских изделий, содержащее траверсу с основанием и боковыми стенками, установленны на ней посредством осей пары захватных рычагов, каждый из которых имеет верхние и нижние плечи, и силовой привод рычагов , отличающееся тем, что. с целью повышения эффективности работы устройства за счет точной установки изделия без выполнения дополнительных операций, верхние плечи каждой пары рычагов имеют разную длину, а на боковых стенках траверсы установлены жесткий упор, взаимодействующий с длинным верхним плечом одного рычага, и подпружиненный упор, взаимодействующий с коротким верхним плечом другого рычага, 2.Устройство по п, 1, о т л я ч а юш; е е с я тем, что, с целью обеспечения заданной последовательности поворота рычагов при их разведении, на основании траверсы закреплен фиксатор, взаимодействующий с короткик верхним плечом рычага, 3.Устройство по п. 1, о т л и. ч а ю щ е е с я тем, что отношение длинного и короткого верхних плеч в каждой паре рычагов равно или больше 1,1. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 1937О2, кл/В 66 С 1/28, 1961, 2,Патент ФРГ № 1531204. кл, 35в, 6/17, 1961, 3,Патент США № 2866660, кл, 294-63, 1958,
| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимное устройство | 1987 |
|
SU1530396A1 |
| Зажимное устройство | 1987 |
|
SU1423336A1 |
| Зажимное устройство | 1987 |
|
SU1433563A1 |
| Захватное устройство для прижима балок | 1971 |
|
SU449869A1 |
| Агрегат для сборки и сварки набора Г-образных ребер жесткости с криволинейным по контуру полотнищем | 1981 |
|
SU1027004A1 |
| Устройство для сборки и сварки судового набора с полотнищем | 1985 |
|
SU1393569A1 |
| Механизированная поточная линия для изготовления секций из листов и ребер жесткости | 1981 |
|
SU975335A1 |
| Способ транспортирования плоских изделий и устройство для его осуществления | 1985 |
|
SU1331756A1 |
| Схват манипулятора | 1985 |
|
SU1255427A1 |
| Поточная линия для сварки плоских полотнищ с ребрами жесткости | 1977 |
|
SU662305A1 |
4- 4
ПР
Tf
-rl
/
/
Tr
TF
иг.1
