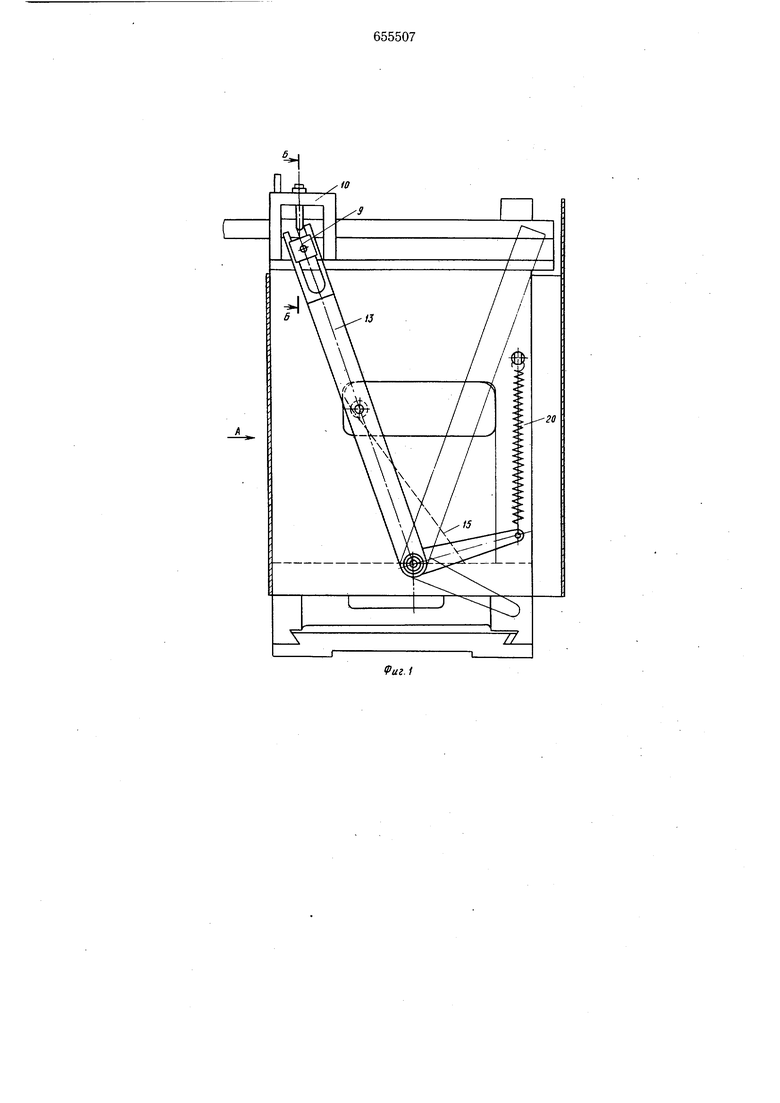
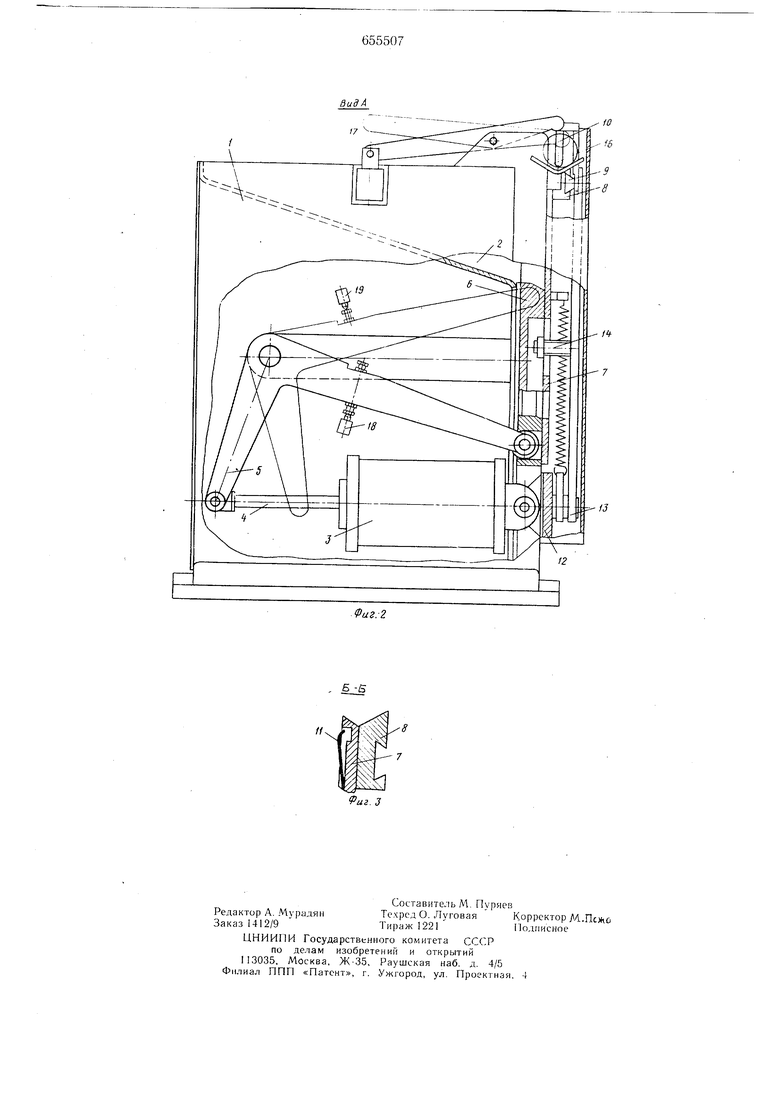
Устройст ло предназначено для автомаТ1;ческ()о перемещения заготовки из бункера в рабочую зону станка и может быть 1К11о.-11 зоваио, например, в резьбонакатных п токарно-револьверных автоматах для транепортирования стержневых заготовок. Известно устройство, в котором заготовка с помощью 1 |ибера юдается из бункера на транспортер для перемещения ее на рабочую пози11ию 1. В этом устройстве для обеснечения перемеи1еипя заготовки шиберным устройством и т|)анспортером применяются два самостоятельных привода. Целью изобретения является уирощение копструкппи устройства. Достигается это тем, что устройство снабжено шарнирно установ.ченным на корпусе двун.чечим рычагом с закрепленным в средней части пальцем, одно плечо которого подпружинено, а другое выполнено в виде вилки, связанной посредством ползушки с заталкивателем, причем на шибере выполнен вырез-копир, взаимодействующий с указанным пальцем двуплечего рычага. На фиг. 1 изображено загрузочное устройство со стороны механизма перемещения заталкивателя; на фиг. 2 - вид на фиг, 3 - сечение Б--Б фиг. 1. Устройство содержит корпус 1, в верхней части которого размещен бункер 2, а i нижней - пневмоцилмндр 3. шток 4 которого рычагом 5 связан с шибером б, размещенным между корнусом 1 и неподвижной стенкой 7. В верхней части ненодвижной стенки 7 установлена на11рав,1яюн1ая 8, в которой смонтирована ползу1пка 9 заталкивателя 10. С вн тренней стороны стенки 7 закреплен пружинный сталкинатель И. На корпусе 1 установлен кронн1тейн 12, несущий подпружиненный рычаг 13, на котором закреплен палец 14, взаимодействуюи ий с копиром 15, выполненным непосредственно на щибере 6. В верхней части рычаг 13 связан с ползушкой 9 заталкивателя 10. На корпусе 1 смонтированы ,тоток 16 и нрижим 17, получающий команду от механизма зажима заготовки (на чертежах не показано) . Предлагаемое устройство работает с.юдующи.м образом. Воздух нз пневмосистемы поступает в воздухораспределитель с пневмоуправле нием (на чертежах не показан), а оттуда в штоковую полость.пневмоцилиндра 3, так как в исходном положении нажат пневмонаконечник 18. Рычаг 5 поворачиваясь против часовой стрелки, поднимает шибер 6, который захватывает заготовки из бункера 2. Одновременно вдоль рабочей плоскости шибера может расположиться несколько заготовок. Лишние заготовки (образующие второй и т.д. ряды) в процессе перемещения шибера удаляются пружинным сталкивателем 11 и падают обратно в бункер 2, а остальные при верхнем положении шибера скатываются в лоток, образованный верхними кромками неподвижной стенки 7 и направляюш,ей 8. Рычаг 5 в своем верхнем положении нажимает на пневмонаконечник 19, который дает команду на воздухораспределитель при срабатывании которого воздух подается в бесштоковую полость пиевмоцилиндра 3, и шибер 6 опускается вниз. В нижнем положении рычаг 5 нажимает па пневмонаконечник 18 и цикл повторяется. Таким образом, шиберное устройство непрерывно совершает возвратно-поступательное движение. В то время, как шибер 6 идет вверх, палец 14, связанный с подпружиненным рычагом 13, пере.мещается рабочей поверхностью копира 15, выполненного непосредственно на шибере 6, и поворачивает рычаг 13, который отводит заталкиватель 10 в крайнее правое положение, освобождая место для подачи заготовки в лоток 16. При перемещении шибера 6 вниз рычаг 13 под действием пружины 20, поджимаюшей палец 14 к копиру 15, поворачивается и заталкиватель 10 перемешает заготовку в механизм зажима. Одновременно с зажатием заготовки, опускается прижим 17, фиксируя заготовку в лотке и препятствуя таким образом ее дальнейшему перемещению. В связи с тем, что усилие трения на прижиме песколько превышает усилие на заталкивателе 10, рычаг 13 при ходе вперед останавливается, когда заталкиватель встречает препятствие. Происходит размыкание конирного пальца с контуром копира. Шибер продолжает двигаться вниз. При очередном ходе вверх шибера копир отводит заталкиватель в исходное положение. Такое колебание рычага 13 будет продолжаться до тех пор, пока позиция в механизме зажима не освободится и прижим 17 поднимется вверх, освобождая путь для перемещения заготовки. Лишние заготовки, поднимаемые шибером, в это время будут сталкиваться обратно в бункер 2. Аналогичный неполный ход заталкивателя 10 будет происходить в том случае, если в лоток 16 с шибера 6 при очередно.м его ходе попадет сразу несколько заготовок. Формула изобретения Загрузочное устройство для подачи стержневых заготовок на рабочую позицию автомата, содержащее бункер, щиберные устройство и заталкиватель, отличающееся тем, что, с целью упрощения конструкции, устройство снабжено шарнирно установленным на корпусе двуплечим рычагом с закреиленным в средней части пальцем, одно плечо которого подпружинено, а другое выполнено в виде вилки, связанной посредством ползушки с заталкивателем, причем на шибере выполнен вырез-копир, взаимодействующий с указанным пальцем двуплечего рычага. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 133324, кл. В 23 Q 7/00, 1960.
)
-- .
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1986 |
|
SU1323332A1 |
| Бункерное захватно-ориентирующее устройство | 1977 |
|
SU772653A1 |
| Устройство для подачи штучных заготовок в рабочую зону штампа | 1980 |
|
SU912353A1 |
| Загрузочное устройство | 1990 |
|
SU1745514A1 |
| Автомат для сборки пряжек | 1981 |
|
SU986701A1 |
| Станок для расточки канавок во вкладышах подшипников | 1985 |
|
SU1247183A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Загрузочное устройство | 1985 |
|
SU1306686A1 |
| Автооператор | 1979 |
|
SU772809A1 |
| Автомат для обработки деталей | 1989 |
|
SU1742032A1 |