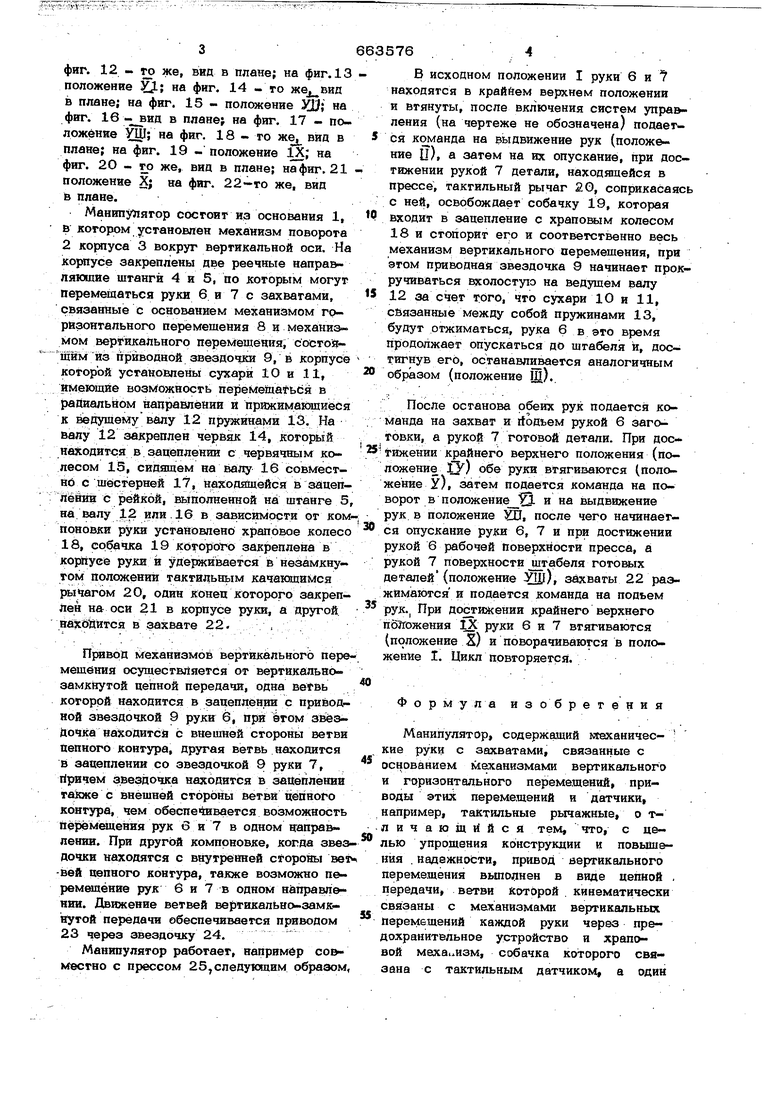
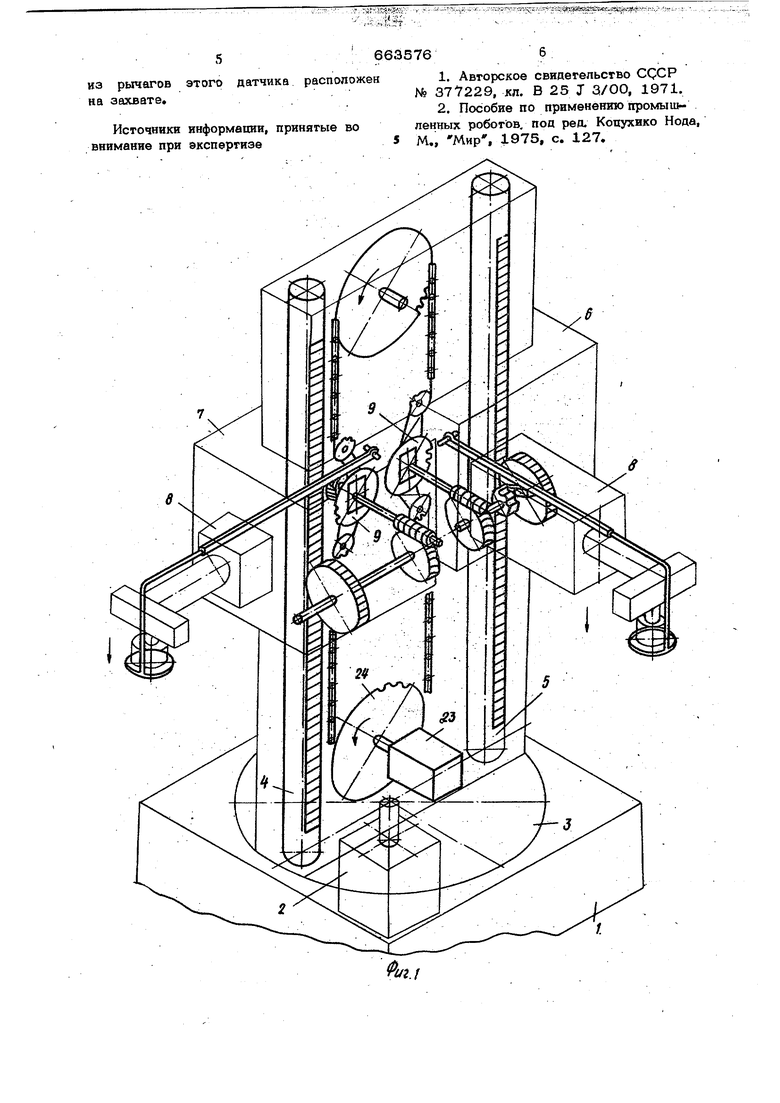
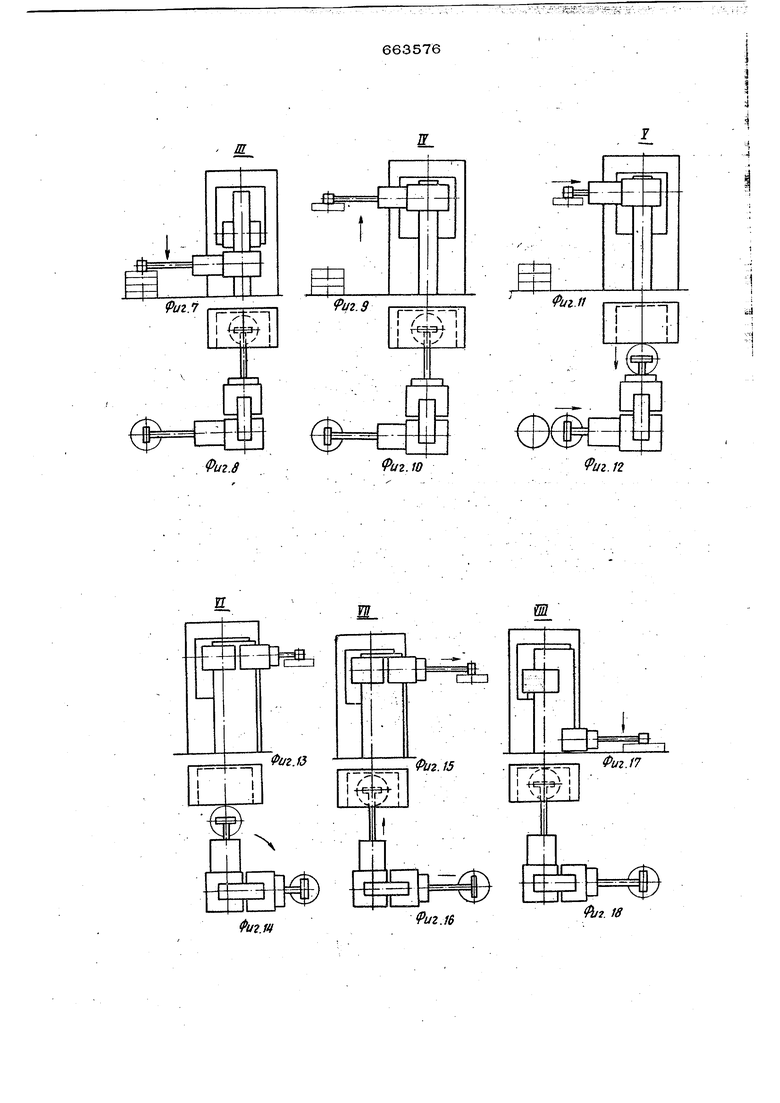
Изобретение относится к области машиностроения, а именно, к манипуляторам для механизации автоматизации технологических процессов производства деталей. Известен манипулятор, предназначенный для механизации и автоматизации тех нологических процессов, в котором содержится механическая рука, смонтированная на основании и несущая захватный орган с приводом l. Недостатком указанного манипулятора является сложность конструкции. Наиболее. близким решением из извест- ных является манипулятор, в котором содержатся механические руки с захватами, связанные с основанием механизмами вертикального и горизонтального перемещения, и приводы этих перемещений и датчики . Недостаток указанного манипулятора заключается в том, что он сложен поконст- рукции и не надежен в работе вследствие отсутствия независимого вертикального перекгешення каждой руки. Цель изобретения - упрощение конструкции и повышение надежности. Указанная цель достигается тем, что привод вертикального перемещения выполнен в виде цепной передачи, ветви которой кинематически связаны с механизмами вертикальных перемещений каждой руки ерез предохранительное устройство и храповой механизм, собачка которого связана с датчиком, например, тектиль- ным рычажным, а один из рычагов этого датчика расположен на захвате. На фиг. 1 изображена принципиальная схема манвтулятрра; на фиг. 2 - схема механизма вертикального перемещения механической руки; на фиг. 3 - схема работы манипулятора с прессом, положение I; на фиг. 4 - то же, вид в плане; на фиг. 5 - положение И; на фиг. 6 - то же, вид в плане; на фиг. 7 - положение Ш; на фиг. 8 - то же, вид в плане; на фиг.9положение на фиг. 1О - то же, вид в плане; яа фиг. 11 - положение У; на фиг. 12 - то же, вид в плане; на фиг. 13 положение Зу.; на фиг. 14 - го в плане; на фиг. 15 - полсвкение yj}; на фиг. 16 в плане; на фиг. 17 - положение УШ; на фиг, 18-го же вид в плане; на фиг. 19 - положение IX; на фиг. 20 - гр же, вид в плане; на фиг. 21 положение X; на фиг. же, вид в плане. Манипуйягор сосгоиг из основания 1, в когором установлен механизм поворота 2 кортуса 3 вокруг вертикальной оси. На корпусе закреплены две реечные напра&ляюшие штанги 4 и 5, по которым могут перемешаться руки 6 и 7 с захватами, связанные с основанием механизмом горизонтального перемещения 8 и механизмом вертикального перемещения, состоя Щим из приводной звездочки 9, в корпусе которой установлены сухари Ю и 11, имеющие возможность перемещаться в радиальном направлении и прижимающиеся к ведущему валу 12 пружинами 13. На валу 12 закреплен червяк 14, который находится в зацеплении с червячным колесом 15, сидящем на валу 16 совместHd с шестерней 17, находвсщейся в зацепДёййи с рейкой, вьтполненной на штанге 5 на валу 12 или. 16 в зависимости от ком поновки руки установлено храповое колесо 18, собачка 19 которото закреплена в корпусе руки и удерживается в незамкнутом положении тактипьнь1м качающимся рычагом 20, один конец которого закреплен на оси 21 в корпусе руки, а другой нахьййтся в захвате 22-, Привод механизмов вертикального пере мещения осуществляется от вертикальнозамкнутой цепной передачи, одна ветвь которой находится в зацеплеН,ии с приводиой звездочкой 9 руки 6, при этом звезДочка находитсй с внешней стороны ветви Цепного контура, другая ветвь находится В зацеплении со звездочкой 9 руки 7, причем звездочка находится в зацеплении таЬке с внешней стороны ветви цепного контура, чем обеспе4ивается возможность пе р0мш1енйя рук 6 и 7 в одном направлении. При другой компоновке, когда звез дочки находятся с внутренней стороны ве -вей цепного контура, также возможно п&ремешёние рук 6 и 7 в одном направлении. Движение ветвей вертикально-замкнутой передачи обеспечивается приводом 23 через звездочку 24. Манипулятор работает, например со&местно с прессом 25,следующим образом 576-4 В исходном положении I руки 6 и находятся в краййем верхнем положении и втянуты, после включения систем упра ления (на чертеже не обозначена) подается команда на выдвижение рук (положение и), а затем на их опускание, при достижении рукой 7 детали, находившейся в прессе, тактильный рычаг 20, соприкасаясь с ней, освобождает собачку 19, которая входит в зацепление с храповым колесом 18 и стопорит его и соответственно весь механизм вертикального перемешения, при этом приводная звездочка 9 начинает прокручиваться исолостую на ведущем валу 12 за счет того, что сухари 10 и 11, связанные между собой пружинами 13, будут отжиматься, рука 6 в это время продолжает опускаться до штабеля и, достигнув его, останавливается аналогичным образом (положение щ). После останова обеих рук подается команда на захват и йодьем рукой 6 заготовки, а рукой 7 готовой детали. При дос-. гижении крайнего верхнего положения (положение 1у) обе руки втягиваются (положение У), затем подается команда на поворот в положение Q. и на выдвижение рук в положение Ш, после чего начинается опускание руки 6, 7 и при достижении рукой 6 рабочей Поверхности пресса, а рукой 7 поверхности Juтaбeля готовых деталей (положение УШ), захваты 22 разжимаются и подается команда на подъем рук.. При достижении крайнего верхнего пбпожения IX руки 6 и 7 втягиваются (положение X) и поворачиваются в положение I. Цикл повторяется. Формула изобретения Манипулятор, содержащий механические руки с захватами, связанные с основанием механизмами вертикального и горизонтального перемещений, приводы этих перемещений и датчики, например, тактильные рычажные, отличающийся тем, что, с целью упрощения конструкции и повышения . надежности, привод вертикального перемещения вьшолнен в виде цепной . передачи, ветви Которой . кинематически связаны с механизмами вертикальных перемещений каждой руки через предохранительное устройство и храповой меха.изм, собачка которого связана с тактильным датчиком, а один иэ рычагов этого датчика расположен на захвате. Источники информации, принятые во внимание при экспертизе 6635 5 766 1.Авторское свидетельство CQCP NO 377229, кл. В 25 X 3/00, 1971. 2.Пособие по применению промышленных роботов, под ред. Коцухико Нода, М„ Мир, 1975, с. 127.
tt иг.Ю иг. П
| название | год | авторы | номер документа |
|---|---|---|---|
| Магазин-накопитель деталей | 1986 |
|
SU1366354A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ ПРЕИМУЩЕСТВЕННО В МНОГОРЯДОВНЫЕ КАССЕТЫ | 1989 |
|
RU2013899C1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Устройство для удаления деталей и отходов из пресса | 1981 |
|
SU1054101A1 |
| РЕЛЬСОПОДЪЕМНИК | 2007 |
|
RU2335594C1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА БАРАНОЧНЫХ ИЗДЕЛИЙ | 1965 |
|
SU214451A1 |
| Транспортное устройство автоматическойлиНии для ОбРАбОТКи ТРуб | 1979 |
|
SU850355A1 |
| Устройство для погрузки на полочные вагонетки камерных сушил пустотелых керамических блоков | 1951 |
|
SU95524A1 |

Фиг.к Риг.1б г 18
Ж
663576
I
иг.2о
иг.22
