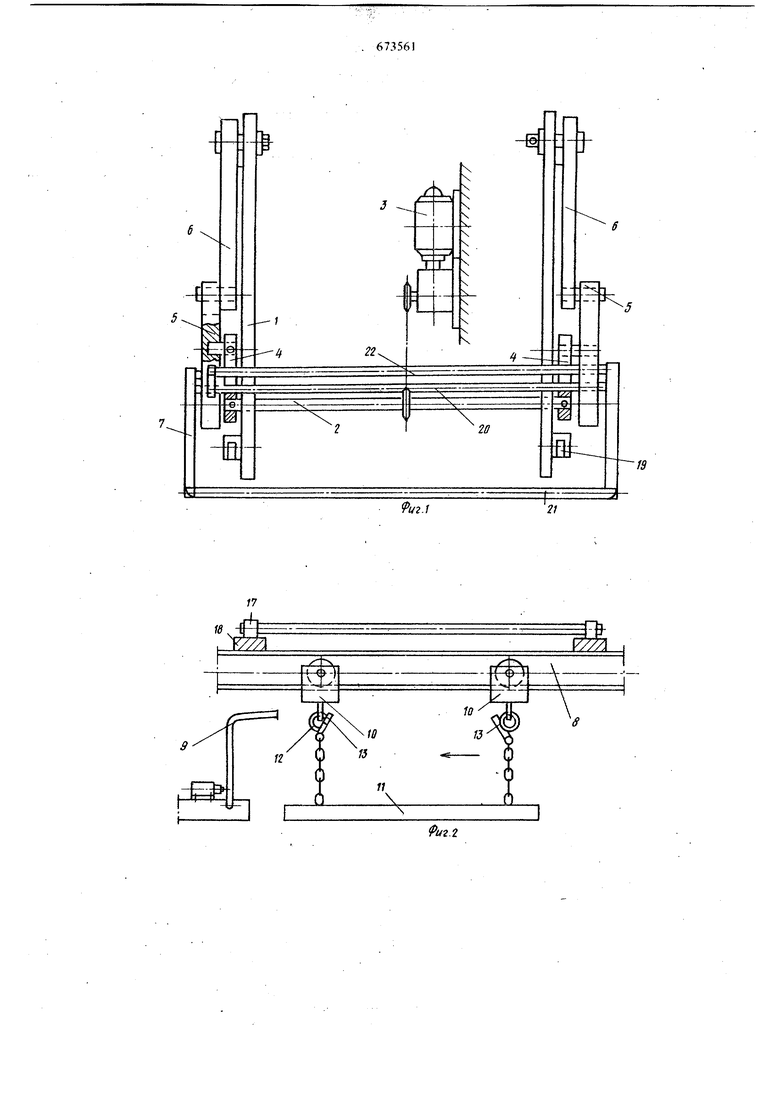
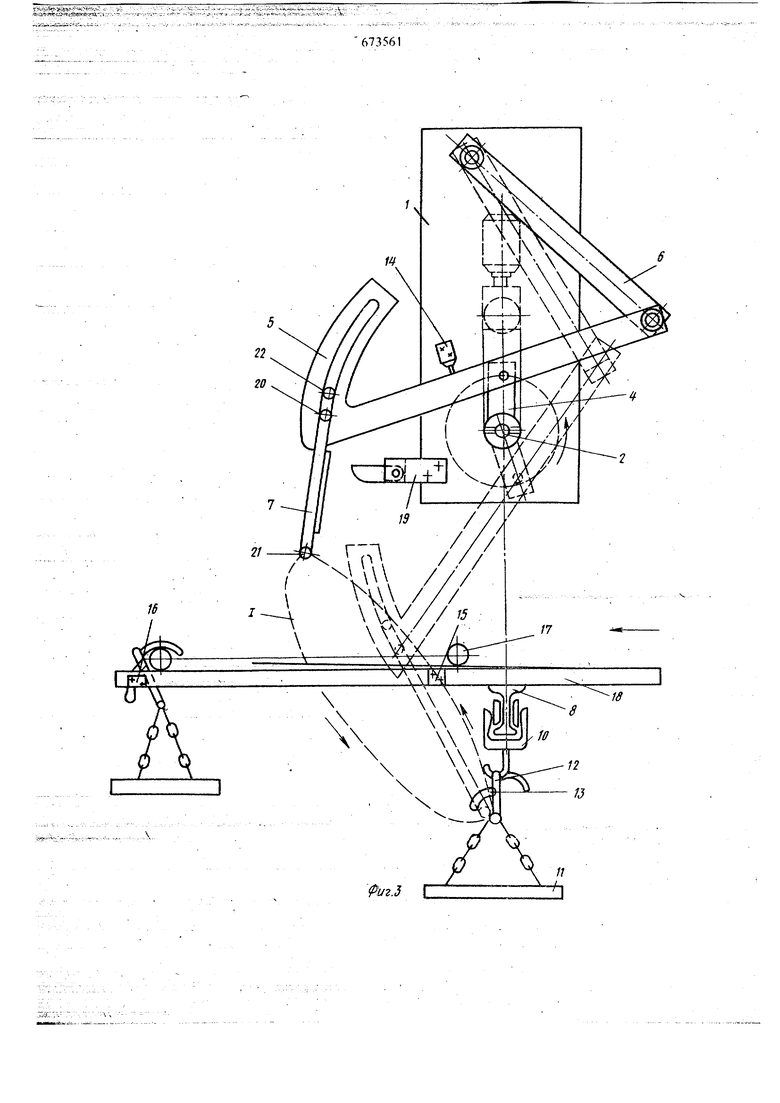
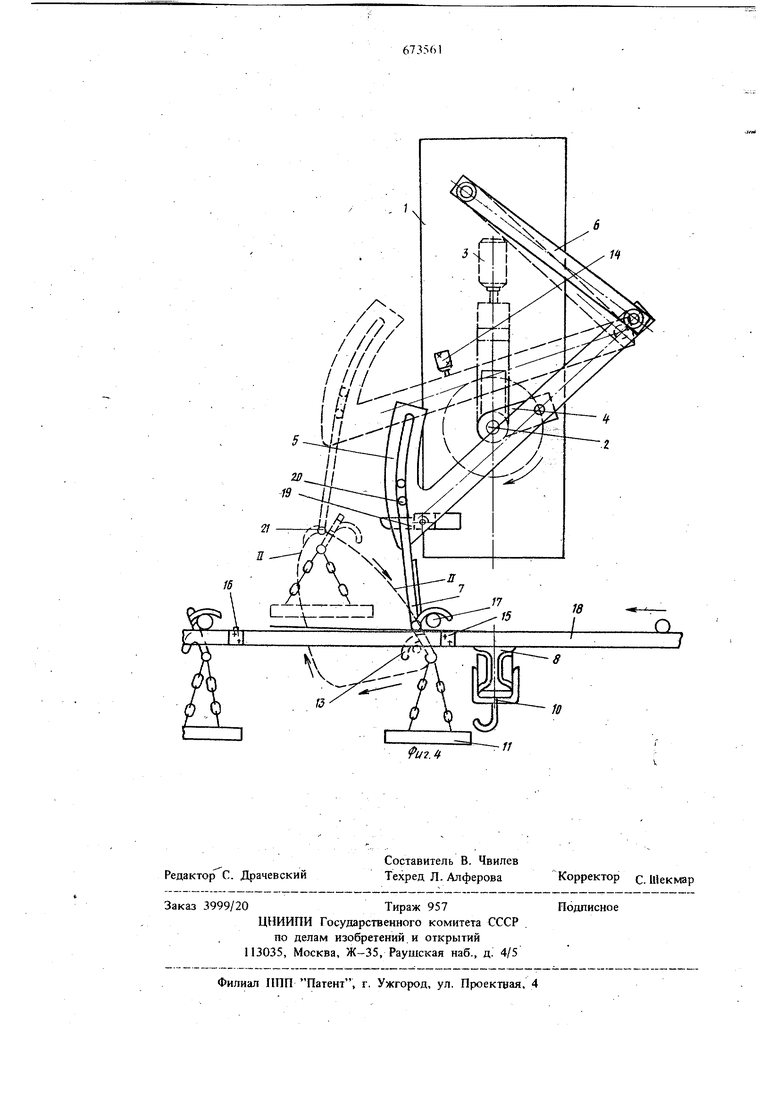
гйх крюков 13. На одной из стоек 1 размещен контакт 14 (фиг. 3 и 4), срабатывающий при вэаимоцействии с рычагом 5. Предусмотрены таже контакты 15 и 16, срабатывающие при взаимодействии с несущей штангой 17 подвесного окрасочного конвейера 18. На стойках 1 размещены собачки 19 с возможностью опорь на них рамки 7 средней поперечиной 20. Нижняя поперечина 21 рамки 7 служит для зацепления с одним из рогов двурогих крюков 13, а верхняя поперечина 22 воздействует на собачку 19.
Устройство работает следующим образом. При 1еремещении каретки 10 с грузом 11 по транспортному конвейеру 8 она упирается в контакт 9, который, срабатывая, останавливает конвейер 8 и одновременнс включает двигатель 3, который посредством вала 2, водил 4 -и рычажной системы приводит в действие механизм захвата - рамку 7. Нижняя поперечина 21 рамки 7 при этом начинает перемещаться по траектории (фиг; 3) и, достигнув нижней точки, заходит под двурогие крюки. При перемещении вверх нижняя поперечина 21 зацепляется за двурогие крюки 13 и снимает петли 12 с крюков подвески, увлекая за собой груз И. При дальнейшем перемещении вверх верхняя поперечина 22 рамки 7 отжимает собачку 19. Далее, нижняя поперечина 21 перемещается по траектории Т (фиг. 3), рычаг 5 взаимодействует с контактом 14, который выключает двигатель 3. При перемещении несущей штанги 17 подвесного окрасочного конвейера 18 срабатывает контакт 15, который включает двигатель 3, при этом вал двигателя 3 начинает вращаться в обратном направлении (фиг. 4). Нижняя поперечина 21 с подвешенным грузом 11 перемещается вниз по траектории И, которая в начальный период совпадает с траекторией 1 и навешивает двурогие крюки 13 на штангу 17 подвесного конвейера 18. При дальнейшем перемещении нижняя поперечина 21 рамки 7 выходат из зацепления с двурогим крюком 13.. Одновременно средняя поп ечйна 20 рамки 7 упирается в собачку 19, прекращая ее перемещение вниз. Рычаг 5 продолжает установленное движение. При этом верняя 22 и средняя поперечина 20 рамки 7 начиканут перемещаться: в поперечных криволинейных пазах рычагов 5, обеспечивая перемещение нижней поперечины 21 от наезжающей штан ги 17 по траектории И (фиг. 4) до тех пор, пока рычаги 5 не CHHMJ рамку 7 с собачек 19. Дальнейшее перемещение нижней поперечины 21 до. исходного верхнего положения происходит по траектория И, совпадающей с траек торией Т. Контакт 1.4. при этом Включает двигатель 3. Контакт 16, взаимодействуя с штангой 17, включает подвесной транспортный конвейер 8 и цикл повторяется.
Окрасочный конвейер 18 движется непрерывно, поэтому перевеска груза 11 с нижней поперечины 21 на несущую штангу 17 происходит при его движении.
Своевременность навески двурогих крюков на набегающую штангу 17 обеспечивается соответствующим подбором длины плеча водила 4 и скорости его вращения, а также изменением местоположения шарнирного соединения вдоль оси рычага 5 в зависимости от скорости перемещения окрасочного конвейера 18.
Перемещение шарнирного соединения к передней части рычага 5 дает более короткую траекторию движения нижней поперечины 21 и, наоброт, перемещение его к задней части дает вытя4нутую траекторию.
Необходимо отметить, что при перемещении вверх нижней поперечины 21 с навешенным грузом 11 электродвигатель выключается сразу, как только двурогие крюки приподнимутся несколько выше уровня несущей штанги 17 Поэтому, после того, как несущая штанга при своем перемещениивключает контактом 15 обратный ход электродвигателя, двурогие крюки практически мгновенно опускаются на ндбегающую штангу 17.
Соответствующим подбором параметров кинематических звеньев устройства обеспечивается также своевременный вь1ход нижней поперечины 21 из зоны движения конвейера 18 после перевески груза 11 несущую штангу 17.
Вместо кнопочных выключателей для управления работой электродвигателя можно применять реверсивный магнитный пускатель, который в авгоматическом режиме обеспечит включение в необходимый момент в работу электродвигателя от трех конечных выключателей: контакта 9 - пуск вперед, контакта 15 - пуск в обратном направлении, контакта 14 - остановка двигателя.
Формула изобретения
Устройство для йередачи груза с одного конвейера на другой, содержащее захватный механизм, установленный на поворотной рычажной системе, связанной с приводом посредством во дила, отличающееся тем, что, с целью повышения работоспособности и упрощения конструкции устройства, захватный механизм выполнен в виде Г-образного рычага с криволинейным пазом на конце и рамы с тремя поперечинами, одна из которых служит для захвата груза, а две другие установлены в пазу рычага с возмЬжностью перемещения.
Источники информации, принятые во внимание при эксперти:}е
1. Авторское свидетельство СССР № 268253, кл. В 65 G 47/52. 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| УСТРОЙСТВО для МЕЖОПЕРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ ГРУ301В | 1972 |
|
SU334785A1 |
| Устройство для разгрузки туш с подвесного конвейера | 1983 |
|
SU1145972A1 |
| Плавучий кран | 1980 |
|
SU943185A1 |
| Устройство для передачи подвесок с одного подвесного конвейера на другой | 1986 |
|
SU1346537A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Подвесной конвейер | 1959 |
|
SU122067A1 |
| Грузозахватное устройство | 1990 |
|
SU1787921A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МЕЖОПЕРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ ГРУЗОВ | 1967 |
|
SU196614A1 |
I il I
--K,
т -fi
18
20
-i
-13
иг.1
21
иг.2
/ п; /7/
Vvi /У/
W
Л
ХЛ
-18
W
8
10
12
П
/ /// / ///
li
V / ///
