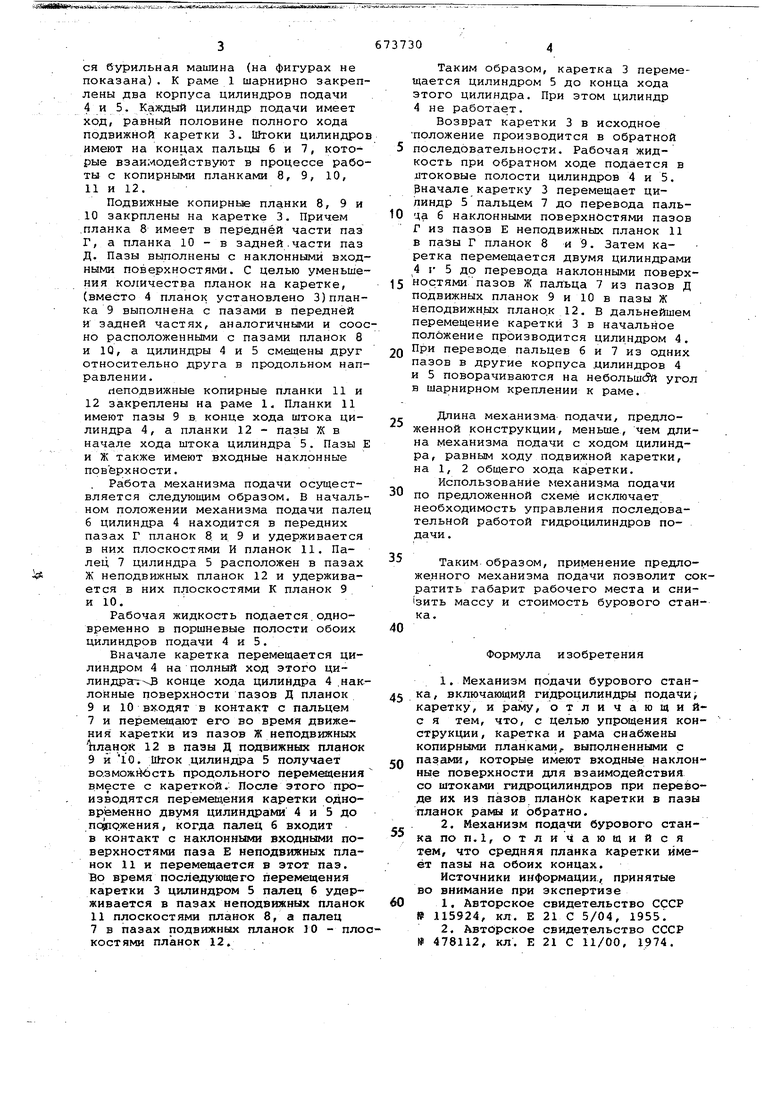
1 . Изобретение относится к буровой технике, а более конкретно - к устройству механизмов подачи буровых станков с подвижным вращателем, и предназначено для использования в конструкциях подземных буровых стен ков и стенков геологоразведочного бурения. Известны механизмы подачи, у кот рых ход цилиндра подачи в два раза меньше перемещения подвижной каретки: с перехватом ведущих элементов у которых после перемещения цилиндра на полный ход он возвращается в исходное положение и зацепляется другими упорами с собачками каретки l. Известные механизмы подачи име1от целый ряд недостатков, а именно требуют выполнения дополнительных холостых ходов цилиндра из-за чего снижается производительность и усло няется управление механизмом подачи.. . Известны механизмы подачи, состо щие из раздвижной направляющей рамы подвижной каретки и двух гидроцилиндров, один из -которых соединен с бурильной головкой и подвижной кареткой, а второй с подвижной кареткой и рамЬй J2j. Недостаток этого устройства заключа.ется в усложнении конструкции рамы, поскольку имеется дополнительная ступень раздвижности рамы и подвижный цилиндр, к KOTOPONO необходимо подвести жидкость. Целью настоящего изобретения яв- , ляется упрЬщенйе конструкции MeicaHtraма подачри бурового стенка. Для достижения этой цели каретка и рама снабжены копирными планками, выполненными с пазами, которые имеют входные наклонные поверхности, для взаимодействия со штоками гт1дроцилиндроб при переходе их из пазов планок каретки в пазы планок рамы и обратно, а средняя планка имеет пазы на обоих концах. Иа фиг. 1 - общий механизма подачи, вид сверху; нафиг. 2 н 3 продольные разрезы А-А и Б-Б фиг. If на фиг. 4 - поперечный разрез В-В фит. 1; на фиг. 5, 6 и 7 - последовательность работы механизмов в различных положениях каретки. Механизм подачи состоит из рамы 1, по направляющим 2 которой перемещается каретка 3. па каретке закрепляетСЯ бурильная машина (на фигурах не показана). К раме 1 шарнирно закреплены два корпуса цилиндров подачи 4 и 5. Каждый цилиндр подачи имеет ход, равный половине полного хода подвижной каретки 3. Штоки цилиндров имеют на концах пальцы 6 и 7, которые взаимодействуют в процессе работы с копирными планками 8, 9, 10,
11и 12.
Подвижные копирные планки 8, 9 и 10 закрплены на каретке 3. Причем .планка 8 имеет в передней части паз Г, а планка 10 - в задней.части паз Д. Пазы выполнены с наклонными входными поверхностями, С целью уменьшения количества планок на каретке, (вместо 4 планок установлено 3)планка 9 выполнена с пазами в передней и задней частях, аналогичными и соосно расположенными с планок 8 и 10, а цилиндры 4 и 5 смещены друг относительно друга в продольном направлении.
rieпoдвижныe копирные планки 11 и
12закреплены на раме 1. Планки 11 имеют пазы 9 в конце хода штока цилиндра 4, а планки 12 - пазы Ж в начале хода штока цилиндра 5. Пазы Е и Ж также имеют входные наклонные поверхности.
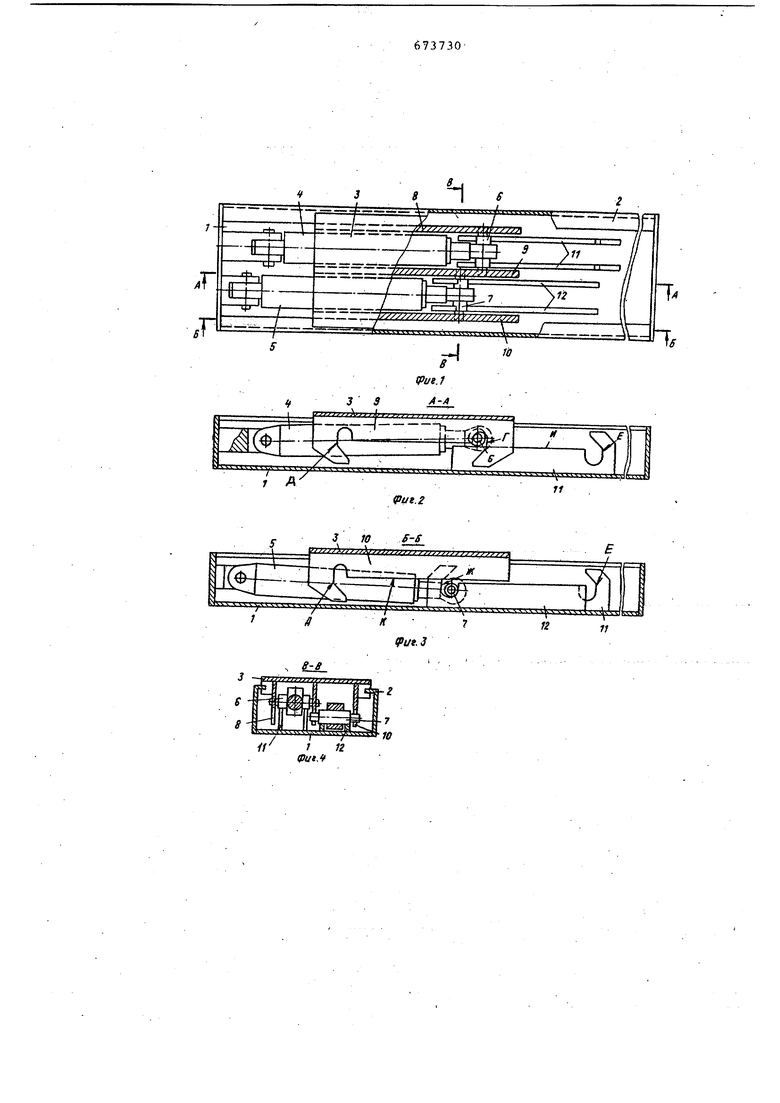
Работа механизма подачи осуществляется Следующим образом. В начальном положении механизма подачи палец б цилиндра 4 находится в передних пазах Г планок 8 и 9 и удерживается в них плоскостями И планок 11. Палец 7 цилиндра 5 расположен в пазах Ж неподвижных планок 12 и удерживается в них плоскостями К планок 9 и 10.
Рабочая жидкость подается.одновременно в поршневые полости обоих цилиндров подачи 4 и 5.
Вначале каретка перемещается цилиндром 4 на полный ход этого цилиндргп В конце хода цилиндра 4 ,наклонные поверхности пазов Д планок 9 и 10 входят в контакт с пальцем 7 и перемещают его во время движения каретки из пазов Ж неподвижных Ьланок 12 в пазы Д подвижных планок 9 и 10. Шток .цилиндра 5 получает во.зможйбсть продольного перемещения вместе с кареткой. После этого производятся перемещения каретки одновременно двумя цилиндрами 4 и 5 до приложения, когда палец б входит в контакт с наклонными входными поверхностями паза Е неподвижных планок 11 и перемещается в этот паз. Во время последующего перемещения каретки 3 цилиндром 5 палец 6 удерживается в пазах неподвижных планок 11 плоскостями планок 8, а палец 7 в пазах ПОДВИЖНЕЛХ планок JO - плоскостями планок 12.
673730
Таким образом, каретка 3 перемещается цилиндром 5 до конца хода этого цилиндра. При этом цилиндр 4 не работает.
Возврат каретки 3 в исходное положение производится в обратной 5 последовательности. Рабочая жидкость при обратном ходе подается в лтоковые полости цилиндров 4 и 5. Эначале каретку 3 перемещает цилиндр 5 пальцем 7 до перевода паль0 ча б наклонными поверхностями пазов Г из пазов Е неподвижных планок 11 в пазы Г планок 8 и 9. Затем каретка перемещается двумя цилиндрами 4 г 5 до перевода наклонными поверх5 ностямипазов Ж пальца 7 из пазов Д подвижных планок 9 и 10 в пазы Ж неподвижн.ых плано.к 12, в дальнейшем перемещение каретки 3 в начальное положение производится цилиндром 4.
0 При переводе пальцев 6 и 7 из одних пазов в другие корпуса .цилиндров 4 и 5 поворачиваются на небольшс5 угол в шарнирном креплении к раме.
Длина механизма подачи, предложенной конструкции, меньше, чем длина механизма подачи с ходом цилиндра, равным ходу подвижной каретки, на 1, 2 общего хода каретки.
Использование механизма подачи 0 по предложенной схеме исключает
необходимость управления последовательной работой гидроцилиндров подачи .
Таким образом, применение предложенного механизма подачи позволит сократить габарит рабочего места и сниЬить массу и стоимость бурового станка.
Формула изобретения
1.Механизм подачи бурового станка, включающий гидроцилиндры подачи,
каретку, и раму, отличающийс я тем, что, с целью упрощения конструкции , каретка и рама снабжены копирными планками, выполненными с
пазами, которые имеют входные наклонные поверхности для взаимодействия со штоками гидроцилиндров при перейоде их из пазов планОк каретки в пазы планок рамы и обратно.
2. Механизм подачи бурового станка по п.1, отличающийся тем/ что средняя планка каретки имеет пазы на обоих концах.
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР
8115924, кл. Е 21 С 5/04, 1955.
2.Авторское свидетельство СССР
9478112, кл. Е 21 С 11/00, 1974. /. rq±i±L tttfe-у - УУУУхУУ/ххП 7 1 |У/7/Д -ф- I Ф- 7 ТГ . .. t.J.,,/. .Л.У У ..i. || ) , 1 . /
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий конвейер | 1981 |
|
SU988690A1 |
| Промышленный робот | 1986 |
|
SU1335446A1 |
| Грейферное устройство штампа | 1982 |
|
SU1026906A1 |
| Грейферное устройство для перемещения заготовок между рабочими позициями многопозиционного пресса | 1986 |
|
SU1484415A1 |
| Промышленный робот | 1988 |
|
SU1530436A1 |
| Грейферное устройство штампа | 1980 |
|
SU978984A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ГОФРИРОВАННЫХ ТРУБ | 2000 |
|
RU2198050C2 |
| Устройство для перемещения и ориентирования штучных заготовок | 1987 |
|
SU1433588A1 |
| Устройство для поштучной выдачи заготовок | 1973 |
|
SU500857A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА | 1973 |
|
SU406787A1 |
/Г 7
к
11
(put.3
il « (put.f
а
673730
Puf.
