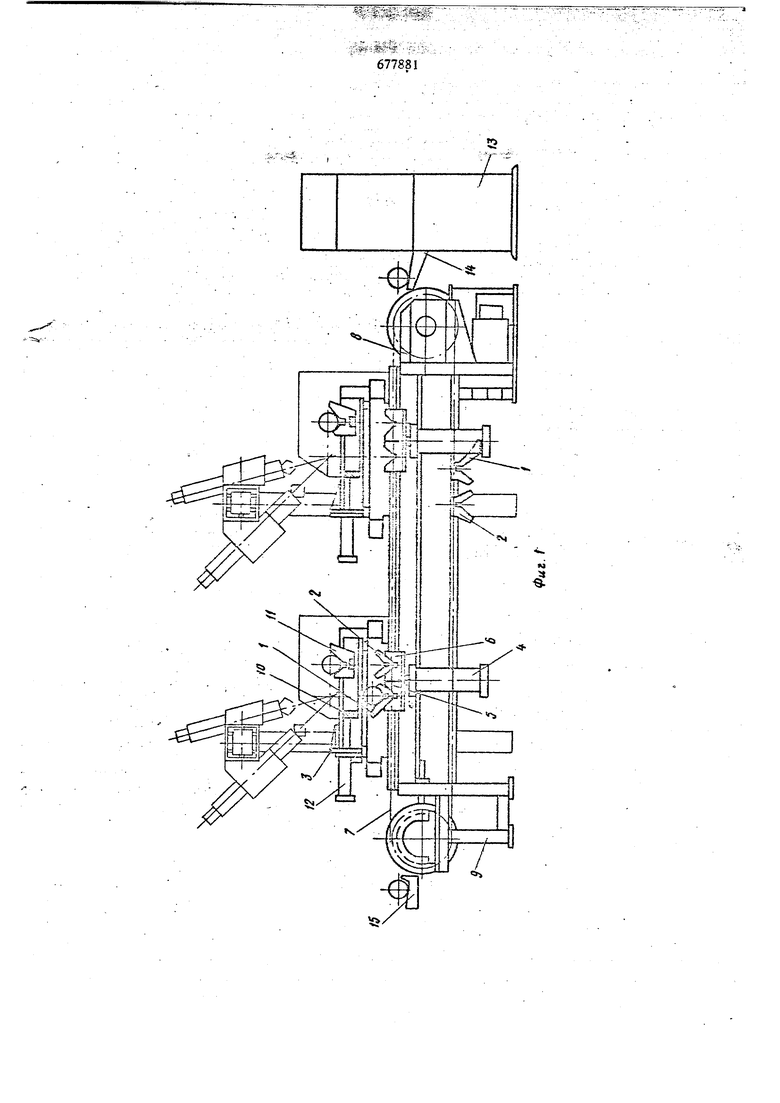
портного устройства установлен прибор контроля 13 с пргимным лотком 14. Загрузошое устройство имеет лоток 15.
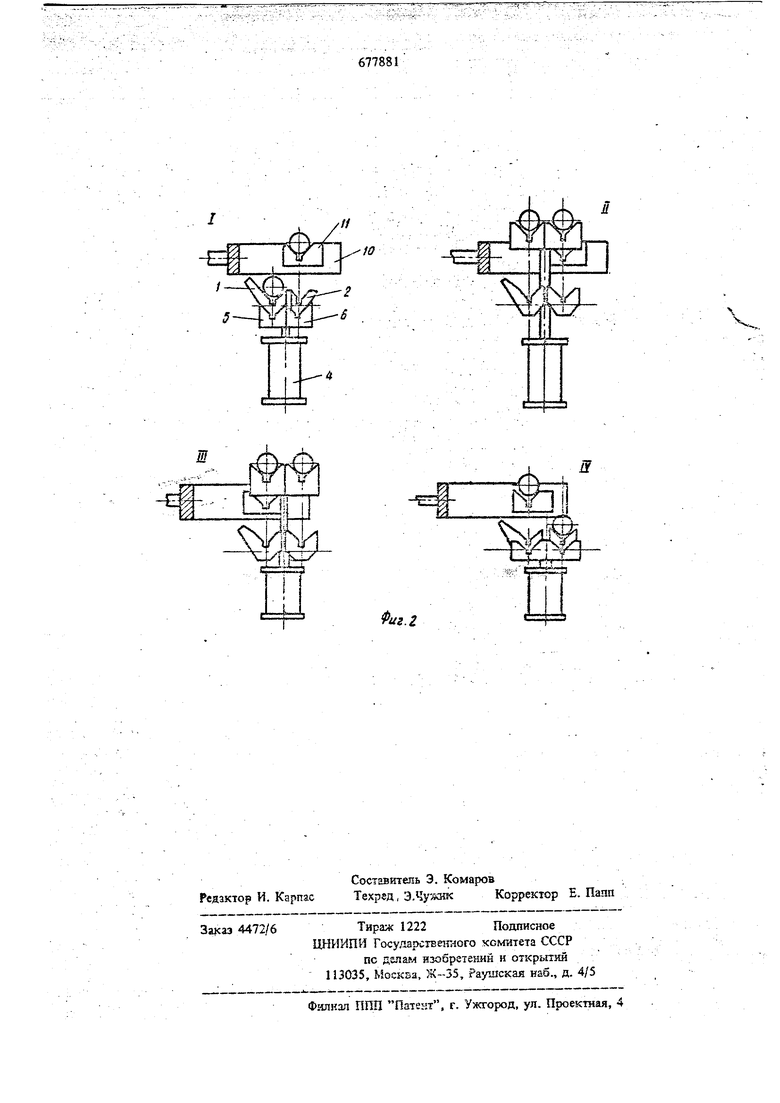
Работа транспортного устройства осуществляется следующим образом. При наличии заготозки на лотке 15 и сигнале об отсутствии заготовки на любом шибере 3 (если сйгаал поступает от нескольких шиберов одновременно, то предпочтение отдается первому по ходу транспортного потока), включается приводная секция 8 кон вейера711ризма 1 забирает заготовку и переносит ее к соответствующему шиберу 3 (положение I, фиг. 2). В этот MOMeifT подвижная рама 10 с призмой 11 находится в крайнем правом положении с обработашгай деталью или без нее. Срабатывает цилиндр подъемника 4, и он призмой 5 подаимает с призмы 1 заготовку выше уровня центров станка и соответственно выще уровня призмы 1 щибера 3 (пополнение Н), Кроме того, подъемник 4 при своем движений вверх сиимает с призмы I обработанную деталь, куда она доставляется от станка с помоШьго автооператора.
В крайнем верхнем положении подъемник 4 подает сйгаал на перемещение рамы 10 пнеамоцилиндром в крайнее левое положение, подводя. освободивщиеся от детали призмы 11 под находящуюся выще ее с заготовкой призму 5,(положение 111). После этого по сигналу от рамы 10 подъемник 4 идет вниз и при этом опускает заготовку на призму 1, а обработанную деталь на призму 2 конвейера (положение (V).
В крайнем нижнем положен1и подъемник 4 ,)Щает сигнал, по которому конвейер переносит обработанную деталь на лоток 14 прибора коитроля 13. Заготовка с призмы П забирается aBtoоператором и загружается в станок независимо от перемещения конвейера.
После смены автооператором заготовки на обработанную деталь на призме И рама 10 перемещается в крайнее, правое положение и подает сигнал об отсутствии заготовки.
При выдаче обработанной детали на лоток 14 призмой 2 одной пары призма 1 другой пары на противоположном конце конвейера в зоне натяжной секции 9 забирает заготовку с лотка 15 и переносит ее к освобод 1вщемуся от загЬтовхи щиберу 3.
Прибор контроля 13, определяя фактические разйеры обработанной детали, подает сйгтгал на гйльнейшую-работу соЬ ветствующего станка или его подналадку.
Формула изобретеиня
Транспортное устройство автоматической линии с параллельно работающ11.ми станками, содерзкащее одноручьевой транспортер с позициями для-заготовок, выполненными в виде призм, и перегружатели, установленные у каждого станка, отличающееся тем, что, с целью обеспечения контроля работы каждого стгшка, каждая позиция транспортера оснгшлеяа дополнительной призмой для размещения изделия, а перегружатель каждого стз1«са выполнен 6 виде двухпозишгонного пЬД1, и установлетпюго над с возможностью возвратно-поступательного перёмецхеиия в направлении, параллельном транспортированию заготовок, однопозйциониого шибера с призмой, причем величина перемещения щнбер я расстояние между позициями подъемника равны расстоянию М(ежду осями призм каждой позиции транспортера.
гТсточнкки информации, принятые во внимание при зкспертязе
1. Авторское свидетельство СССР Р 549321, кл. В 23 Я 41/02, 1975.
l. с- I677881

| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное устройство автоматической линии | 1978 |
|
SU918028A2 |
| Транспортное устройство автоматической линии | 1981 |
|
SU1042959A2 |
| Транспортная система автоматической линии | 1983 |
|
SU1169907A1 |
| Транспортное устройство автоматической линии | 1981 |
|
SU1054023A2 |
| Поточная линия для сборки и сварки блоков цилиндров дизельных двигателей | 1978 |
|
SU753573A1 |
| Автооператор | 1969 |
|
SU344701A1 |
| Шаговый конвейер | 1978 |
|
SU749757A1 |
| Автоматическая поточная линия для транспортировки деталей | 1952 |
|
SU98523A1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| УСТРОЙСТВО ПОДАЧИ ДЕТАЛЕЙ | 2013 |
|
RU2533980C1 |
,,.
/та
.if1
Ч
ш
иг.г
