Предлагаемое устройство относится к области грузоподъемных устройств, а именно - к магнитным захватам с автоматическим циклом управления и может быть использовано для захвата и транспортирования ферромагнитных материалов как в автоматических линиях, так и в качестве индивидуальной оснастки отдельных грузоподъемных устройств. Известно магнитное захватное устройство, содержащее подвижный и неподвижный магнитные блоки, установленные в корнусе, с приводом переметаFHIH подвижного блока, который включает в себя под веску с установленной в ней пружиной, захренленную на подвеске рейку, свободно сидящую на валике и входятгхую в заие ление с ней, шестерню, собачку, ащяитую на осИр зшсреплонной в шестерне, храпови и кривошип, аакреплокные на упомянутом валике, тягу, соед-шяющую криво иип с зубчатым сектором, иходяип м в зацепление с зубчатой рейкой полви.жного блокаИ В 31Х)м устройстве для того, чтобы произвести nepoMeuremis нодвижного блока, необходимо приложить значительное переключающее усилие, направленное на преодолеЕ-пш сил взаимодействия магнитнглх блоков, сил трения в механизме управлсэ- 1ШЯ и в наираачяющих корпуса. При нерегулярном техн 1ческом обспунсиь ании КПД мехаш1зма управления снижается, так; как увеличиваются потери трения в кинематических парах. Поэтому для увеличештя надежности срабатывания мехвш1з т управления необхош1мо увеличивать переключающее усилие, а значит и собственный вес захвата, что снижает его грузоподъемность на единицу собственного веса. Известно также мап-штное захватное устройство, содержащее корнус с подвижным и неподвижных магтштными блоками I мехаштзм поворота магнитного блока 2. Привод механизма поворота известного устройства сложен по конс;трукшп1, имеет электродвигатель, пусковую аппаратуру, механические нер едачи, что так-
же увеличивает вес самого захвата, CFn-i хая ого гpycono;;ЬG., а c;::o;;a : :C:i. констГ1укщ1И может быть lipMiMiiOJi TOTo, что jQiKji ого p;iGoibi будот иару;;;г;г|чс.;„ 11е;гыо uaoopcTciiHii :опьг :-:
ПрОКЗВОДНТСУТЛЮСГН П НПЛОЖКОСП рЛбО ГЬ yCTpOHCTBcU
что V г 1МЧ
виь t е I т пш I I
аып III II i 1 IT
баи 1CI I 1 1 I 11
p at г o/т I 11 f
ПИП I I о1т I 1 1 г I
331 p r If1
ijp; 1 1 II r
в П I 1 t 1 1
с j II к 1 Т1
FillI I f II (II11
60 I I t I1
обе 1 I I 1 it 1 1 I iro Ai 11 1 о 1C u 1 IfI
llpC ll t с 1 II J111 i
6ЫТ1 Ь 111 I L It
Hell I 1 IT I ч и с с i Ю1 п чI
УЧ 1 1К -if I 101 I tItI
MC I JIl,I т I Iir ) 1 11
60 lo II h E, I 1 I 1 HC i i
меньшой в срелнсй чагт i iii
чато к большей n вер i iioroin, a НГ наялонпо -. ic г ной последовательностио
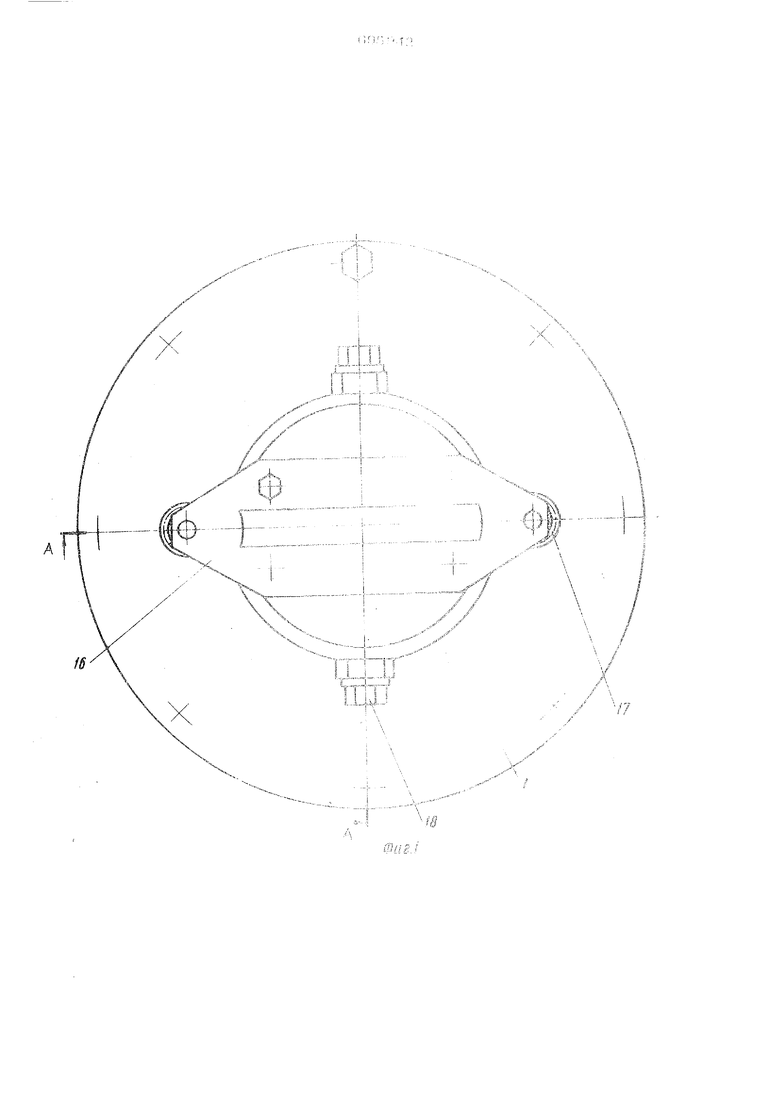
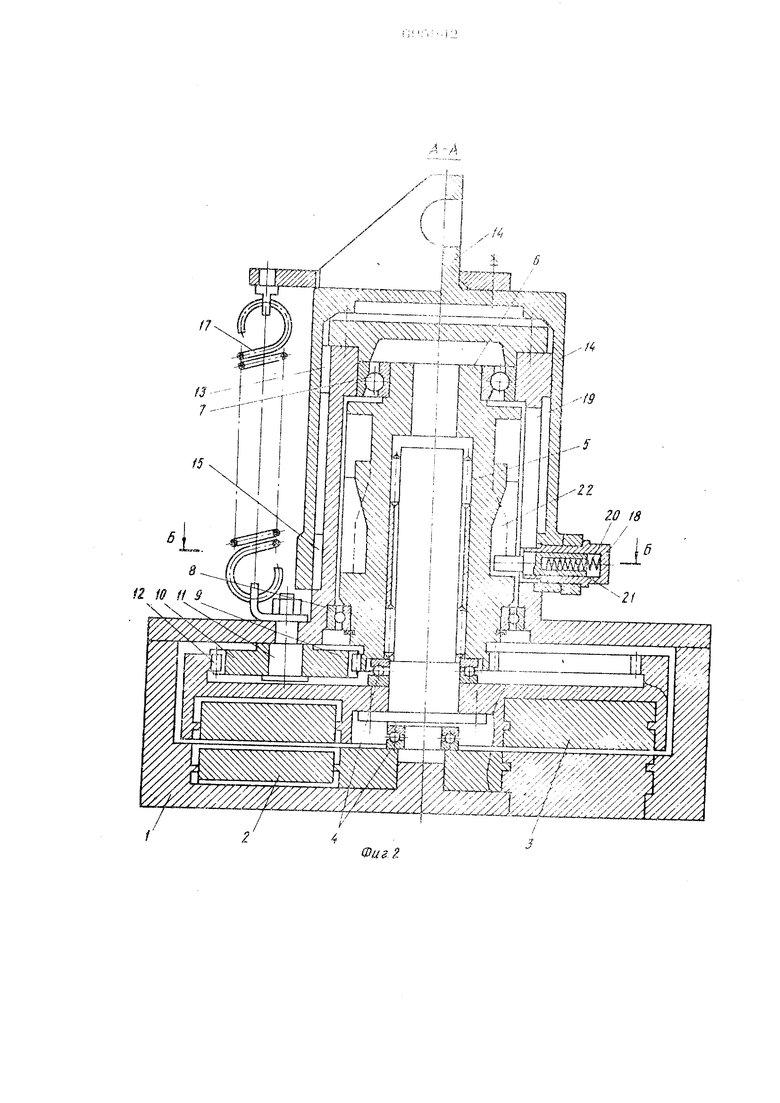
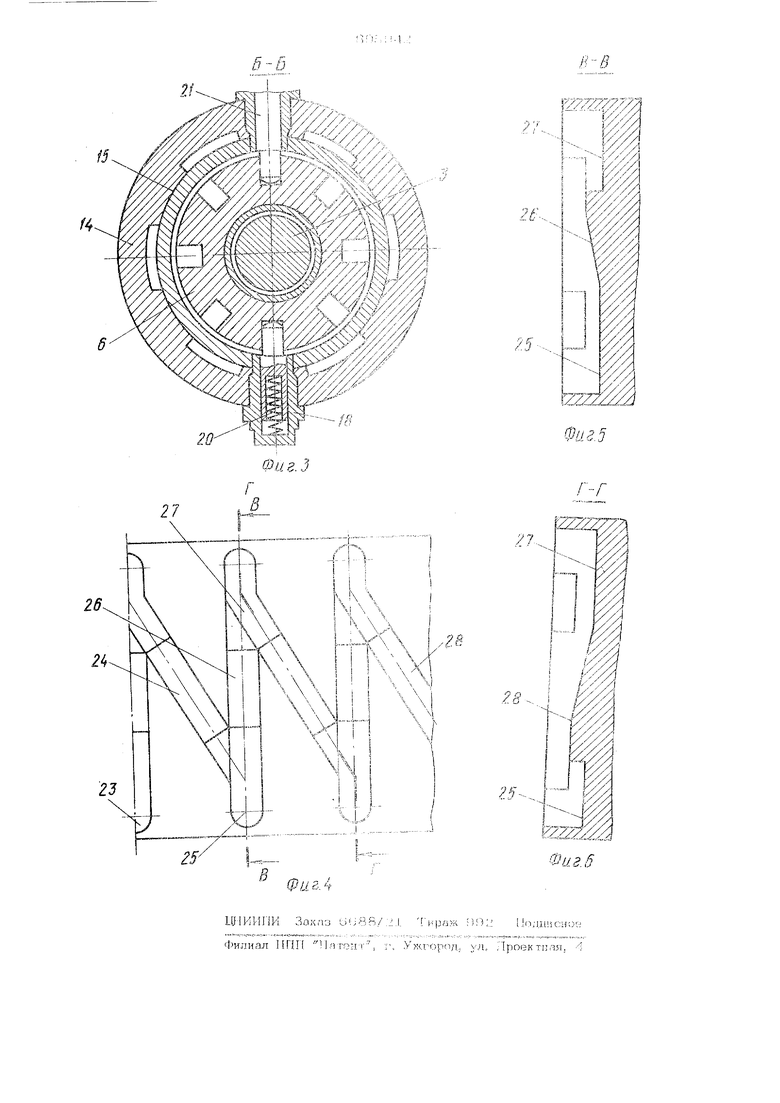
Яа фиг,, 1 1зображеп вид маг;пгтиоО захватного устройства в плане-;, на iiir., сечение Л-Л на фиг, 1г на фи7% 3 - се чение на фиг. 2; на фит- 4 - развертка шалиндрической iiOBSpxHOCTir барабана; на фш% 5 - сечеико а фят- 1на фиг, 6 - сочешш Г-Г на фиг. 4.
Автоматический магнитшз1Й .зш:вач сэтоит из корпуса 1, в котором устагюг л иы неподвижный 2 и подвижный Г; м:агнитные блоки и меха1шзм новооота иодвижным блоком.
Неподвижный магш-гтный блок 2 жас ко соединеи с корнусом 1„ Подвижиь;й маг ГИТ1плй блок фиксируетс5г ynopvibiKin нодшинник а и 4 в осевом нанраапоячи п игольчатыми подшипниками 5, устаиовлйиными в расточке барабана 6. в радиалт:,ном нанравлешти. Барабан 6, устацойленный в корнусе на нодшипетках 7 к о. и осевом ШгфавленШ1 фиксируется кодггиНииками 4 и 8 и ю-тнематически свястач с ИОДВИЖ1СЫМ магт1тным блоком 3 ayoncrroi передачей, образуемой шестерней У, ча-резанной на барабане 6, промежуточис)й и:естерней 10, устацовлсмной на оси 11
аыЛМ BGHIiOivi
::/ :.
ка ;ь::огс уча1Т болыиой в и Moiu -iioi; ем г« ворхиок: к больДнеи
г гятныи захват раазом, 1 f:ii
5ойкЫ 1-- Г ОГ;леД е 1хней часП кор1астя1 ива тся чод
а. Усилие: л
. / - r;rpr-i ;eii;eK;io :r;b;ii:i корпуса J пролока бурт.13 обой урт 1о корпуса 1. Дась захват. ироиэссе 1 ;;1тгфть: 2:1, неремем прулати 20 че по22, проходя по вар
2 от глубокого гпг кui;s 25 участков к ieзй часП 2и и наиа-3 остаются в покое, захват сохраняет положение выключено. При последующем опускании захвата на груз обойма 14 под действием взведенных от собственного веса захвата пружин 17 перемещается относительно корпуса 1 вертикально ВЕШЗ. Стаканы 18 обоймы 14, двигаясь в пазах 19 корпуса 1, удер живают обойму 14 от поворота относитель но корпуса. Штифты 21 в процессе перемещешш вниз воздействуют на боковые поверхности наклонных 24 участков кана ки 22 и поворачивают барабан 6 на шаг Поскольку в верхнем месте соединения 27 участков канавки 22 глубина наклонного участка 24 больше,прохождение штифтов возможно только по наклонным участ кам. Вращение от барабана 6 через зубчатую передачу,. редуцируясь, передается подвижному блоку 3. Происходит переклю чение захвата в положение включено. При подъеме захвата с грузом штифты 21 проходят по вертикальным участкам 23, как было описано выше, захват сохраняет положение включено. При опускании захвата с грузом на площадку штифты 21 проходят по наклонным участкам 24, производится переключение в положение выключено. Предлагаемый автоматический магнитный захват вследствие увеличения передаточного числа и повышения КПД механизма управления и выполнения профилированной канавки переменной по глубине обеспечивает увеличение грузоподъемности на единицу собственного веса и повышение надежности срабатывания. Формула иэобретенн 1.Магнитное захватггое устройство, содержащее корпус с подвижным и неподвижным магнитными блоками и меха mi3M поворота магнитного блока, о т- л и чающееся тем, что, с цепью повышешш производительности и надежности его в работе, оно снабжено обоймой, подвижно установленной на корпусе, который выполнен со сквозными пазами, и барабаном с про)ИлироБанными канавками, расположен}сым внутри корпуса, а мехатзм поворота подвижного блока содержит закрепленшзШ на обойме стаканы с подпру и1ненными пальцами, расположенными в пазах корпуса и взаимодействующими с канавками барабана, при этом барабан и подвижный блок соединены между собой посредством зубчатой передачи, а обойма, барабан и подвижный блок установлены соосно друг другу. 2.Устройство по п. 1, о т л и ч а ющ е е с я тем, что профилированные канавю барабана выполнены в виде черед тош11хся вертикальных и соединяюшлк их наклонных участков переменной глуб1П€ы, плавно уменьшающейся на вертикальном участке от большей в штжнем месте соединения к меньшей в средней части, затем ступенчато к большей в верхнем месте соединения, а на наклонном участке - в обратной Последовательности, Источники информации, принятые во Бнш.-1ание при экспертт зе 1.Авторское свидетельство СССР NI ЗО4811, кл. В 66 С 1/О6, 1971. 2,Патент США № 36537О6, кл. 294-655, 1972. /I W 11 9

| название | год | авторы | номер документа |
|---|---|---|---|
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Крановый захват-кантователь | 1984 |
|
SU1240722A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Манипулятор | 1986 |
|
SU1371895A1 |
| Устройство для захвата и сброса грузов | 1987 |
|
SU1523524A1 |
| Технологическая оснастка для изготовления резьбовых изделий | 1985 |
|
SU1326442A1 |
| Крановый захват-кантователь | 1976 |
|
SU704883A1 |