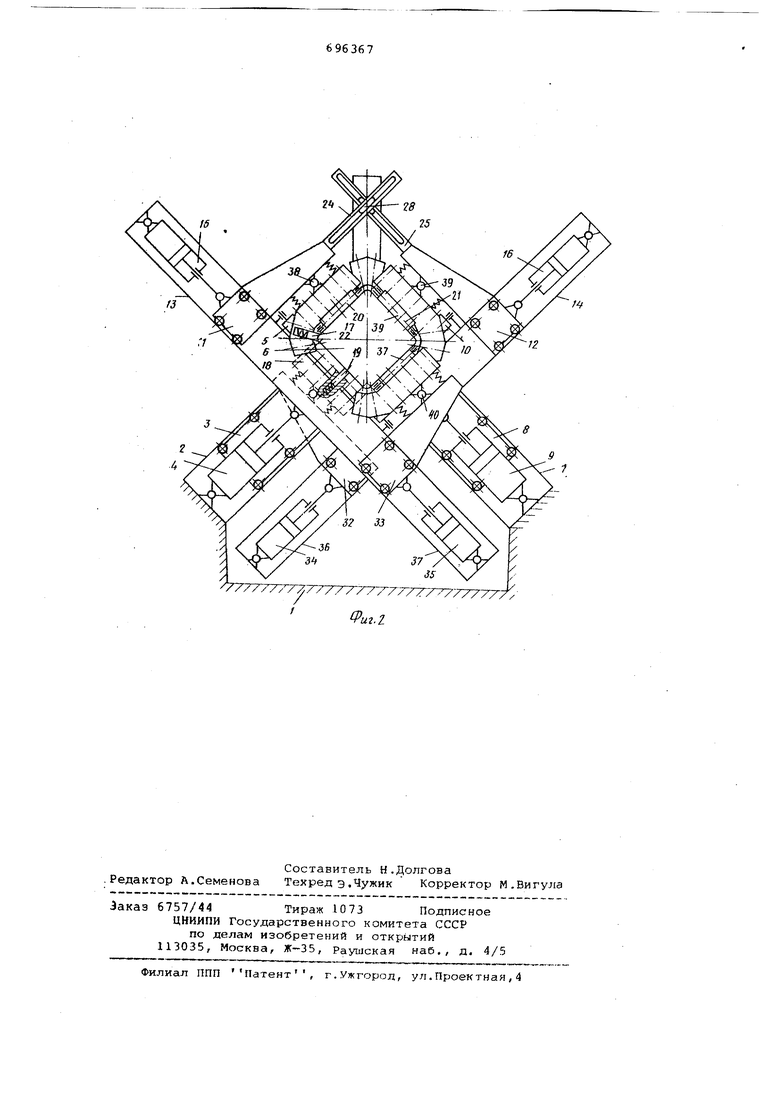
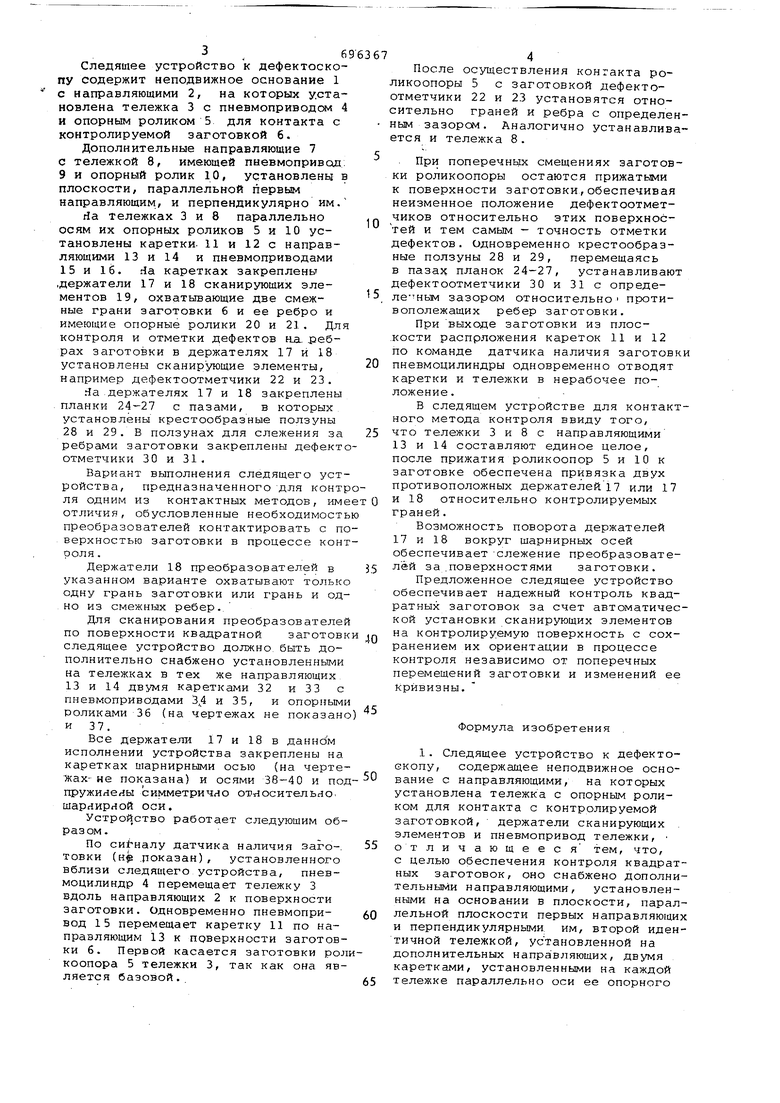
(54) СЛЕДЯЩЕЕ УСТРОЙСТВО К ДЕФЕКТОСКОПУ 36 Следящее устройство к дефектоскопу содержит неподвижное основание 1 с направляющими 2, на которых установлена тележка 3 с пневмоприводом 4 и опорным роликом 5 для контакта с контролируемой заготовкой 6. Дополнительные направляющие 7 с тележкой 8, имеющей пневмопривод. 9 и опорный ролик 10, установлены в плоскости, параллельной первым направляющим, и перпендикулярно им. ria тележках 3 и 8 параллельно осям их опорных роликов 5 и 10 установлены каретки. 11 и 12 с направляющими 13 и 14 и пневмоприводами 15 и 16. На каретках закреплены .держатели 17 и 18 сканирующих элементов 19, охватывающие две смежные грани заготовки 6 и ее ребро и имеющие опорные ролики 20 и 21. Для контроля и отметки дефектов аа ребрах заготовки в держателях 17 и 18 установлены сканирующие элементы, например дефектоотметчики 22 и 23. rfa держателях 17 и 18 закреплены планки 24-27 с пазами, в которых ycтaнoвлё ы крестообразные ползуны 28 и 29. В ползунах для слежения за ребрами заготовки закреплены дефект отметчики 30 и 31 . Вариант выполнения следящего уст ройства, предназначенного для конт ля одним из контактных методов, им отличия, обусловленные необходимост преобразователей контактировать с п верхностью заготовки в процессе кон роля . Держатели 18 преобразователей в указанном варианте охватывают тольк одну грань заготовки или грань и од но из смежных ребер.. Для сканирования преобразователе по поверхности квадратной заготов следящее устройство должно, быть дополнительно снабжено установленными на тележках в тех же направляющих 13 и 14 двумя каретками 32 и 33 с пневмоприводами 3,4 и 35, и опорным роликами 36 (на чертежах не показан и 37. Все держатели 17 и 18 в данно м исполнении устройства закреплены на каретках шарнирными осью (на черте жах- не показана) и осями 36-40 и по пружинены симметрично относительно шарнирной оси. Устройство работает следующим об разом. По сигналу датчика наличия заготовки (н .показан), установленного вблизи следящего устройства, пневмоцилиндр 4 перемещает тележку 3 вдоль направляющих 2 к поверхности заготовки. Одновременно пневмопривод 15 перемещает каретку 11 по направляющим 13 к поверхности заготов ки 6. Первой касается заготовки ро коопора 5 тележки 3, так как она яв ляется базовой.. После осуществления контакта роикоопоры 5 с заготовкой дефектотметчики 22 и 23 установятся отноительно граней и ребра с определеным зазором. Аналогично устанавливатся и тележка 8. При поперечных смещениях заготовки роликоопоры остаются прижатыми к поверхности заготовки,обеспечивая неизменное положение дефектоотметчиков относительно этих поверхностей и тем самым - точность отметки дефектов. одновременно крестообразные ползуны 28 и 29, перемещаясь в пазах планок 24-27, устанавливают дефектоотметчики 30 и 31 с определе нкм зазором относительно противополежащих ребер заготовки. При выходе заготовки из плос.кости распрложения кареТок 11 и 12 по команде датчика наличия заготовки пневмоцилиндры одновременно отводят каретки и тележки в нерабочее положение. В следящем устройстве для контактного метода контроля ввиду того, что тележки 3 и 8 с направляющими 13 и 14 составляют единое целое, после прижатия роликоопор 5 и 10 к заготовке обеспечена привязка двух противоположных держателей 17 или 17 и 18 относительно контролируемых граней. Возможность поворота держателей 17 и 18 вокруг шарнирных осей обеспечивает -слежение преобразователей за .поверхностями заготовки. Предложенное следящее устройство обеспечивает надежный контроль квадратных заготовок за счет автоматической установки сканирующих элементов на контролируемую поверхность с сохранением их ориентации в процессе контроля независимо от поперечных перемещений заготовки и изменений ее Кривизны. Формула изобретения . 1 . Следящее устройство к дефектоскопу, содержащее неподвижное основание с направляющими, на которых установлена тележка с опорным роликом для контакта с контролируемой заготовкой, держатели сканирующих . элементов и пневмопривод тележки, отличающеес я тем, что, с целью обеспечения контроля квадратных заготовок, оно снабжено дополнительньоМи направляющими, установленными на основании в плоскости, параллельной плоскости первых направляющих и перпендикулярными, им, второй идентичной тележкой, установленной на дополнительных направляющих, двумя каретками, установленными на каждой тележке параллельно оси ее опорного
ролика, пневмоприводом кареток, на каждой из которых размещены .держатели сканирующих элементов и закреплены с пазами, в которых установлен крестообразный ползун, жестко связанный с одним из держателей сканирующих элементов.
2. Устройство по п.1,отличающееся тем, что, оно дополнительно снабжено двумя каретками с пневмоприводом, установленными с возможностью встречного возвратнопоступательного перемещения относительно первых кйреток.
3, Устройство по ПП.1 и 2, о тличающеес ятем, что держатели сканирующих элементов закреплены на каретках шарнирной осью и подпружинены относительно их, Источники информации, принятые во внимание при .экспертизе
1,Авторское свидетельство СССР 260944, кл. G 01 N 27/82, 1970.
2,Патент США 37663635,
кл. G 01 N 29/04, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ультразвукового контроля изделий | 1990 |
|
SU1781598A1 |
| Передвижная установка для ультразвукового контроля изделий | 1984 |
|
SU1231458A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2001 |
|
RU2184372C1 |
| Сканирующее устройство к дефектоскопу | 1979 |
|
SU974250A1 |
| Установка для ультразвукового контроля изделий | 1986 |
|
SU1538114A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2006 |
|
RU2331066C1 |
| Сканирующее устройство для дефектоскопии круглого проката | 1981 |
|
SU968724A1 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| Устройство для ультразвуковогоКОНТРОля | 1979 |
|
SU832463A1 |
| МЕХАНИЗМ УСТАНОВКИ ДАТЧИКОВ ДЛЯ СКАНИРУЮЩЕГО УСТРОЙСТВА ДЕФЕКТОСКОПИИ ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 2000 |
|
RU2186367C1 |