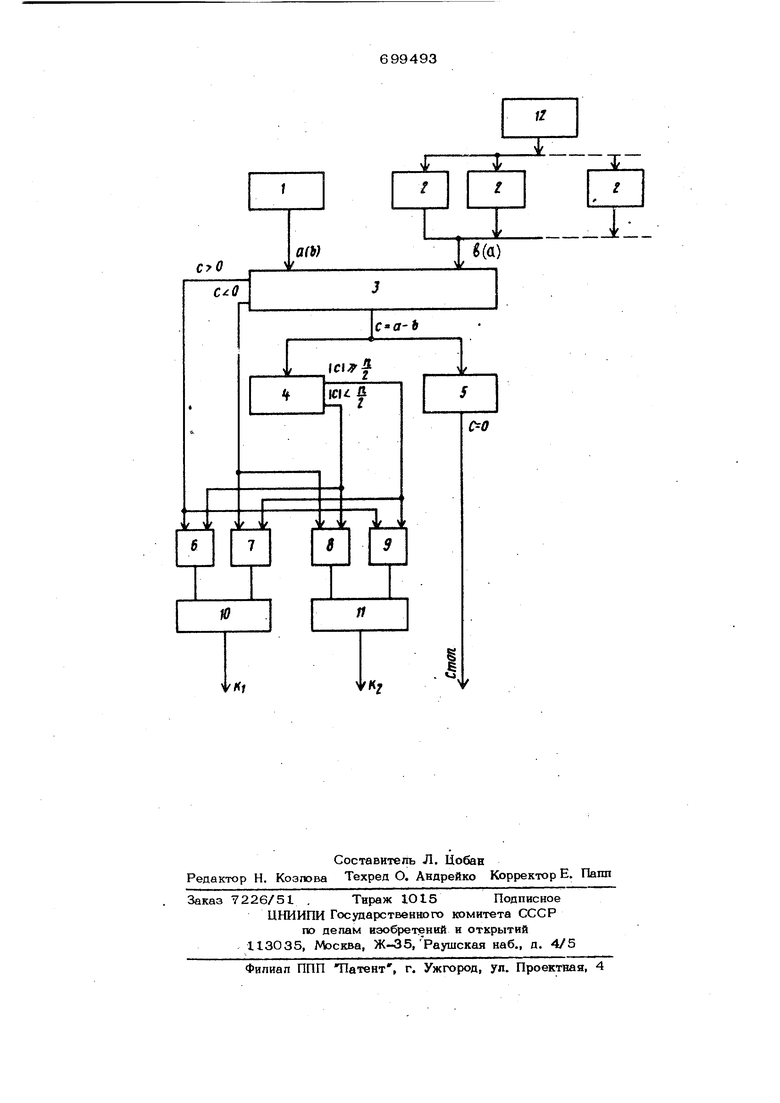
36 му 4 сравнения и п блок 5 совпаления. Сигналы выходов схемы 4 сравнения и знаковых Выходов сумматора постутшют на соответствующие элемеЕ1ты И 6-9 и ИЛИ 10, 1.1 и на выходах элементов ИЛИ 10, 11 образуются команды на перемешение: К по часовой стрелке и К против часовой стрелки. С блока 5 совпа пения при разности в сумматоре, paBHoft снимается команда Стоп. Переключатель 12 позиций задает номер позиции адресования и подключает соответствующие датчики 2 к сумматору 3. Устройство может работать в двух режимах. Режим 1 - объекты перемещения (на пример, полки механизированных стеллажей или каретки конвейеров с адресованием) жестко укреплены на роторной линии. Режим И - объект перемешения одиночный (например, автооператор замкнутой гальванической линии). В первом режиме с блока 1 ввода в сз мматор 3 вводится номер требуемой попки (число а), а переключателем 12 подсоединяется тот блок датчиков 2, который расположен на позиции, куда адресуется попка. С этого блюка датчиков информация о номере наход$пцейся там полки (число в) поступает в сумматор 3 с выхода которого разность с i- а - в Г поступает в схему 4 сравнения, где сра вивается с. округленной до целого числа вепвчиной, равной половине количества полок { П/2), Результаты сравнения больше или равно и меньше и сигналы о знаке разности с сумматора 3 с помощью логических эпемевтов И 6-9 н ИЛИ 10, 1 формируют 1« мавды К и К, определяю щие направление перемещения полки по кратчайшему пути в позицию адресования При прохояохении каждой полки мимо позиции адресования воздействукядие элементы (упоры, Э1фаиы), установленны на пол1ю, взаимодействуют с датчиками положения того блока датчиков, которые установлены в позиции адресования и подключены к сумматору переключателем 12 позиций адресования. Когда адресуемая блоком 1 ввода полка перемес тится в позицию адресования, разность с IS а - в равна нулю и блок 5 совпадения формирует команду Стоп. 34 Таким образом, устройстгю позволяет полку с любым номером адресовать в любую позицию адресования по кратчайшему пути. Во втором режиме при адресовании одиночного объекта перемещения, например автооператора, от блока 1 ввода в сумматор вводится (число в), т.е. адрес позиции, а с блоков 2 датчиков - информация о местоположении автооператора на замкнутой гальванической линии, т.е. (числа а), которая считывается переключателем 12, жестко укрепленным на автооператоре. Истинный адрес автооператора, т.е. номер позиции, считанный переключателем 12 с блока датчиков 2, установленных на этой позиции, поступает в сумматор 3 и, в конечном итоге, на дах устройства формируется одна из команд К и К2 перемещающая с помощью исполнительных элементов (не показаны) автооператор вдоль гальванической линии. Когда автооператор перемещается в адресуемую позицию, разность с а-в равна нулю, блок 5 совпадения вырабатывает команду Стоп и автооператор останавливается. Предлагаемое устройство имеет щирокие функциональные возможности, что значительно расщиряет область его применения. Формула изобретения Устройство для управления перемещением полок механизированных стеллажей по авт. св. № 379918, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено переключателем позиций и дополнительными датчиками положения, установленными на позициях адресования и и подключенными последовательно с переключателем позиций к входу сумматора. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 379918, кл. Q05 В 21/00, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемещением полок механизированных стеллажей | 1974 |
|
SU548502A1 |
| Устройство для управления перемещением полок механизированных стеллажей | 1983 |
|
SU1129588A2 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1974 |
|
SU578241A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1479400A1 |
| Устройство для управления автооператорами гальванических линий | 1975 |
|
SU560206A1 |
| Пневматическое устройство управления механизированным стеллажом | 1978 |
|
SU721824A1 |
| Устройство для управления перемещением механизма по замкнутой трассе | 1988 |
|
SU1594486A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1475873A1 |
| Устройство для управления перемещением полок механизированного склада | 1976 |
|
SU789353A1 |
| Устройство для управления механизмами с замкнутой трассой следования рабочего органа | 1979 |
|
SU787302A1 |