1
Изобретение относится к программному управлению многокоординатными устройствами и может быть использовано для записи программы управления положением и ориентацией исполгнительного органа промышленного робота, например при дуговой сварке
Известны устройства пpoгpaм вл управления промышленным роботом, содержащие блок обучения, приводы коордййат положения и ориентации датчики перемещения координат положния и ориентации, вычислительный блок и блок памяти 1 .
Однако такое устройство имеет сложный процесс записи программы.
Наиболее близким техническим решением к изобретению является устройство, содержащее последователно соединенные блок обучения, приводы координат положения, датчики перемещения координат положения, первый вычислительный блок и блок памяти, а также приводы координат ориентации, выходы которых через датчики перемещения координат оритации подключены ко вторым выходам первого вычислительного блока, и второй вычислительный блок, первые
выходы которого соединены со входами приводов координат положения 2,
Недостатком этого устройства является то, что при изменении ориентации исполнительного органа вначале наблюдается смещение его рабочего контакта, которое от датчиков ориентгщии подается в вычислительный блок, вырабатывающий регулирующее
воздействие на приводы координат
положения, которые ликвидируют это рассогласование. При этом электрод,в зависимости от величины динамического рассогласования, наблюдаемого в
начальный период, может упереться в плоскость свариваемой детали,что приводит к его излому или другой деформации. Кроме того, необходимо в процессе обучения иметь два режима работы, когда -обеспечивается стабилизация точки контакта и когда осуществляется управление каждой координатной независимо.
Цель изобретения - повышение
точности устройства.
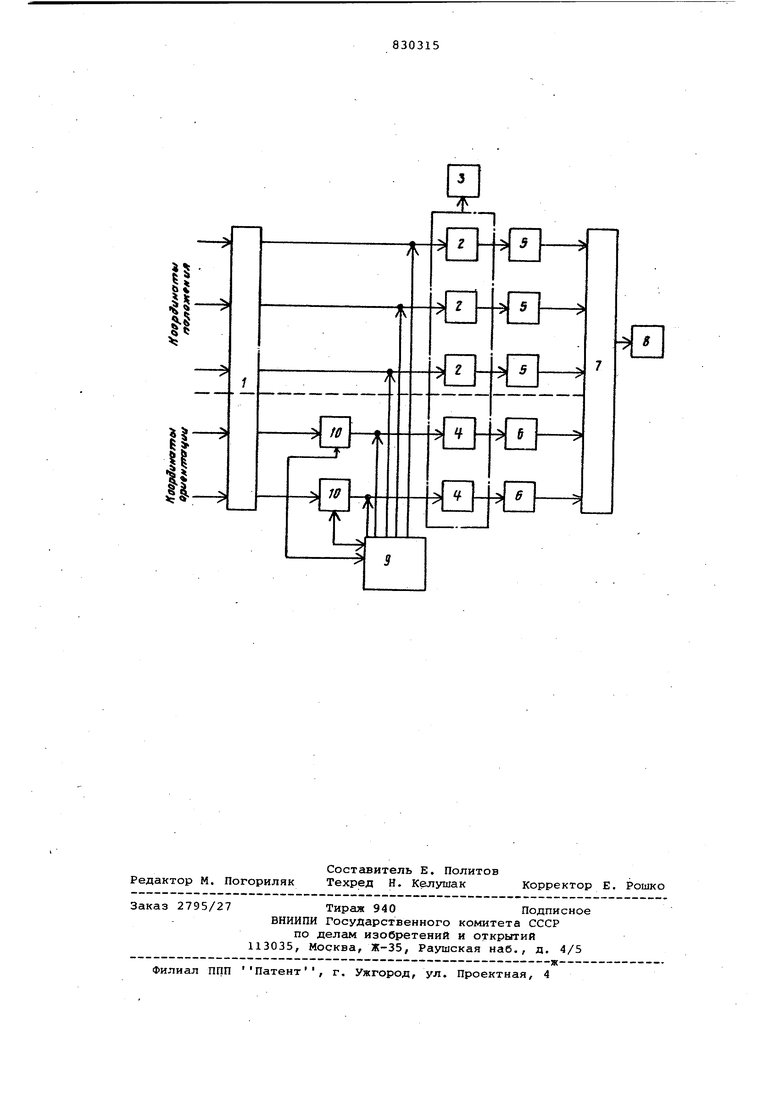
Цель достигается тем, что уст,ройство содержит ключи, через которые вторые выходы блока обучения подключены ко входам приводов координат ориентации, вторые выходы ключей соединены со входами второго вы числительного блока,вторые выходы которого подключены ко входам приво дов координат ориентации. На чертеже представлена блок-схе ма предлагаемого устройства. Устройство содержит блок 1 обуче ния приводы 2 положения, исполнительный орган 3, приводы 4 ориентации, датчики 5 перемещения координат положения и ориентации б, первый вычислительный блок 7, блок памяти, второй вычислительный блок 9, ключи 10. Устройство работает следующим образом. Оператор, задавая перемещение на блоке 1.обучения, управляет приводами 2 и 4 перемещения, причем информация о перемещении с помощью датчиков 5 и 6 передается- в первый вычислительный блок 7 и записываетс в блоке 8 памяти. При этом блок 1 обучения через ключи 10 подключен к приводам 4, В этом случае осущест вляется независимое управление по каждой координате положения и ориен тации исполнительного органа 3. Выполняется первый режим работы при обучении робота. Во втором режиме работы необходи мо обеспечить стабилизацию рабочего контакта относительно заданной точк при изменении ориентации исполнительного органа. В данном случае блок 1 обучения ключами 10 подключается к вычислительному блоку 9. При установке заданного угла ориен тации на блоке 1 обучения заданный сиг нал рассогласования поступает во втор вычислительный блок 9, который рассчи вает необходимые управляющие воздейс вия для координат положения. Сигналы вычисленных управляющих воздействи подаются на входы приводов 2 и одн временно подается сигнал на привод ориентации и исполнительного органа 3. Этим самым достигается одноременное движения приводов 4 и 2, что обеспечивает согласованное во времени движение привода 4, когда заданное перемещение с блока 1 обучения поступает в один и тот же момент времени на привод ориентации 4. Применение изобретения позволяет повысить точность устройства и исключить возможность поломки электрода при изменении его ориентации. Формула изобретения Устройство для ввода программы управления промышленным роботом, содержащее последовательно соединенные блок обучения,приводы координат положения, датчики перемещения координат положения, первый вычислительный блок и блок памяти, а также приводы координат ориентации, выходы которых через датчики перемещения координат ориентации подключены |Ко вторым входам первого вычислительного. блока, и второй вычислительный блок, первые выходы которого соединены со входами приводов координат положения, отличающеес я тем, что, с целью повышения точности устройства, оно содержит ключи, через которые вторые выходы блока обучения подключены ко входам приводов координат ориентации, вторые выходы ключей соединены со входами второго вычислительного блока, вторые выходы которого подключены ко входам приводов координат ориентации , Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 54И47, кл. G 05 В 19/42, 1972. 2.Авторское свидетельство СССР № 641708, кл. В 25 Т 9/00, 1977 (прототип).
|5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для записи программы управления промышленным роботом | 1977 |
|
SU726494A1 |
| Устройство для записи программы промышленным роботом | 1978 |
|
SU706823A1 |
| Устройство для управления промышленным роботом | 1981 |
|
SU970320A1 |
| Система программного управления для робота-манипулятора | 1978 |
|
SU744456A1 |
| Цифровая система программного управления роботом-манипулятором | 1979 |
|
SU943644A1 |
| Устройство для прокладки маршрута адаптивного промышленного робота | 1980 |
|
SU882734A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1150616A1 |
| Система программного управления для робота-манипулятора | 1977 |
|
SU713682A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU881668A1 |
| Устройство для записи программы контурного управления промышленным роботом | 1978 |
|
SU930255A1 |
l
s-
