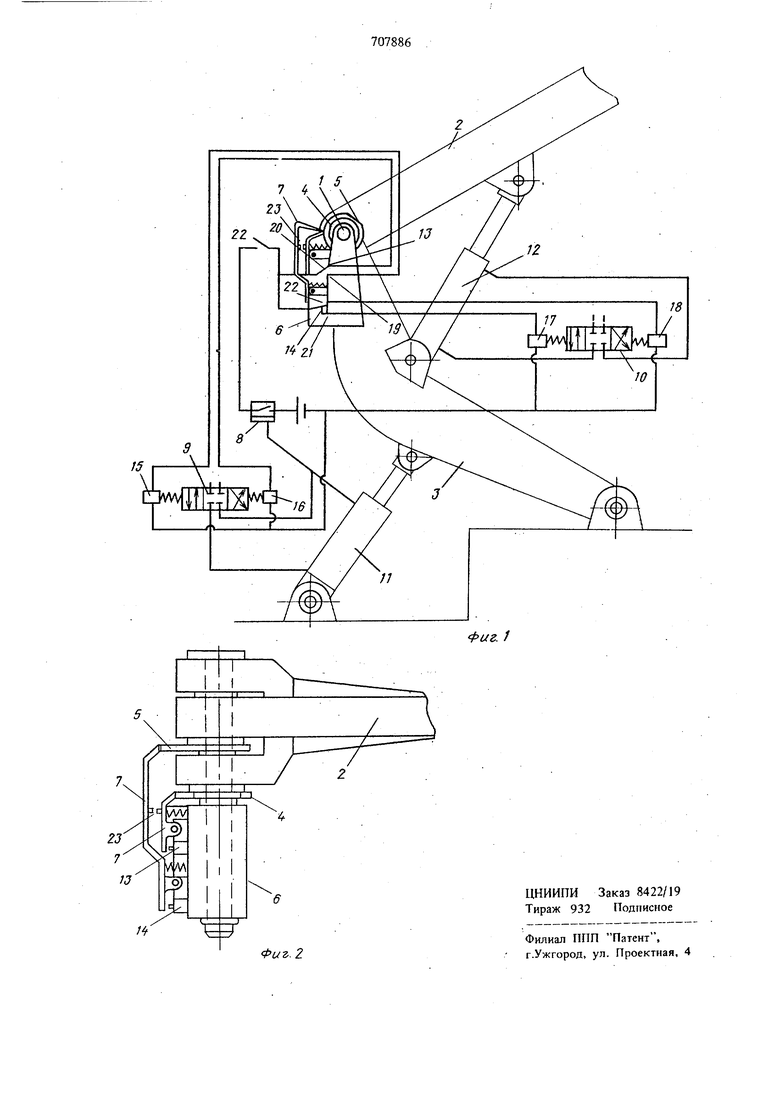
Изобретение относится к подъемно-траспортному машиностроению, а именно к огра1шчителям грузоподъемности кранов и может быть использовано в погрузчиках-манипуляторах. Известен ограничитель грузоподъемности стрелового крана, содержащий реле давления и цилиндр стрелы, а также кулачки вылета стрелы И рукояти с контактами 1. Известен также ограничитель грузоподъемност погрузчика-манипулятора, содержащий ось шарнирного соединения рукояти со стрелой, кулачки стрелы и рукояти, расположенные на оси и соединенные соответственно со стрелой и рукоятью, отвес, подвешенный на оси, и подпружиненные контактодержателн, смонтированные на отвесе и связанные соответственно с ку лачками стрелы и рукояти, а также реле давления и электрогидрозолотники цилиндров стрелы и рукояти 2. Недостатком известных ограничителей является сравнительно низкая надежность их в рабо те. Цель изобретения - повышение надежности ограничителя. Цель достигается тем, что ограничитель снабжен дискретными датчиками положения стрелы и рукояти, смонтированными на отвесе, а злектрогидрозолотники цилиндров стрелы и рукояти имеют по крайней мере два управляющих входа, каждый из которых включен последовательно с соответствующим выходо. соответствующего дискретного датчика положения стрелы и рукояти, с контактами контактодержателей и реле давления. На фиг. 1 схематично изображен предлагаемый ограничитель грузоподъемности; на фиг.2контактодержатели, вид сверху. Ограничитель грузоподъемности погрузчикаманипулятора содержит ось 1 шарнирного соединения рукояти 2 со стрелой 3, кулачки 4 и 5 стрелы и рукояти, расположенные на оси 1 и соединенные соответственно со стрелой 3 и рукоятью 2, отвес 6, подвешенный на оси 1, и подпружиненные контактодержатели 7, смонтированные на отвесе 6 и связанные с кулачками 4 и 5 стрелы и рукояти, а также реле 8 давления и электрогидрозолотники 9 и Ю цилиндров 11 и 12 стрелы и )укояти. Дискретные датчики 13 и 14 хголожения стрелы и рукояти смонтированы на отвесе 6. Электрогидрозолотники 9 и 10 выполнены по крайней мере с двумя управляющими входами 15, 16 и 17, 18, каждый из которых включен последовательно с соответствующим выходом 19, 20 и 21, 22 дискретного датчика 13 и 14, с контактами 23 контактодержателей 7 в реле 8. Ограничитель работает следующим образом. Кулачок 4 стрелы 3 взаимодействует с кулачком 5 рукояти 2 посредством контактов 23 и при достижении заданного вылета замыкает их. При переходе стрелой 3 горизонтального положения кулачок 4 стрелы 3 переключает контакты выходов 19, 20 датчика 14 положения . стрелы 3, чем подготавливает цепь управляющего входа 15 или 16. При переходе рукоятью 2 горизонтального положения кулачок 5 рукояти 2 переключает контакты выходов 21, 22 датчика 14 положения рукояти, чем подготавливает цепь управляющего входа 17 или 18 электрогидрозолотника 10 цилиндра 12 рукояти. При достижении в полости цилиндра 11 стрелы давления, равного настройке реле 8 давления, последнее замыкает свой контакт. При достижении погрузчиком-манипулятором опасного опрокидывающего момента происходит замыкание цепи управляющего входа злектрогидрозоло ников 9 и 10. Подается давление в соответствующие полости цилиндров 11 и 12 и происходит уменьщение вылета стрелы и рукояти, при этом устраняется опасность опрокидывания. В случае движения стрелы 3 снизу вверх и рукояти 2 сверху вниз при их первоначальном положении выше линии горизонта ограничитель грузоподъемноста работает следующим образом. Выход 20 датчика 13 положения стрелы замкнут, и подготовлена цепь включения joipaB ляющего входа 16. В датчике 14 положения ру
кояти замкнут выход 21, чем подготовлена цепь включения управляющего входа 17. С достижением опасного опрокидывающего момента замыкается контакт 23 и срабатывает реле 8. Происходит включение электрогидрозолотника 9 и 10 цилиндров 11 и 12 стрелы и рукояти. Подается давление в соответствующие полости .цилиндров 11 и 12, происходит уменьщение вылета стрелы и рукояти, чем устраняется опасность опрокидывания.
Формула изобретения
Ограничитель грузоподъемности погрузчика-ма,5 нипулятора, содержащий ось щарнирного соединения рукояти со стрелой, кулачки стрелы и рукояти, расположенные на оси и соединенные соответственно со стрелой и рукоятью, отвес, подвешенный на оси, и подпружиненные контактодержатели, смонтированные на отвесе и связанные с кулачками стрелы и рукояти, а также реле давления и электрозолотнкки цилиндров стрелы и рукояти, отличающийся тем, что, с целью повыщения надежности его в работе, он снабжен дискретными датчиками положения стрелы и рукояти, смонтированными на отвесе, а электрогидрозолотники цилиндров стрелы и рукояти имеют по крайней мере два управляющих входа, каждый из которых соединен последовательно с соответствующим выходом соответствующего дискретного датчика положения стрелы и рукояти, с контактами контактодержателей и реле давления. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке : № 2022711/11, 13.05.74. 2.Авторское свидетельство СССР № 543611, кл. В 66 С 23/90, 12.09.75 (прототип).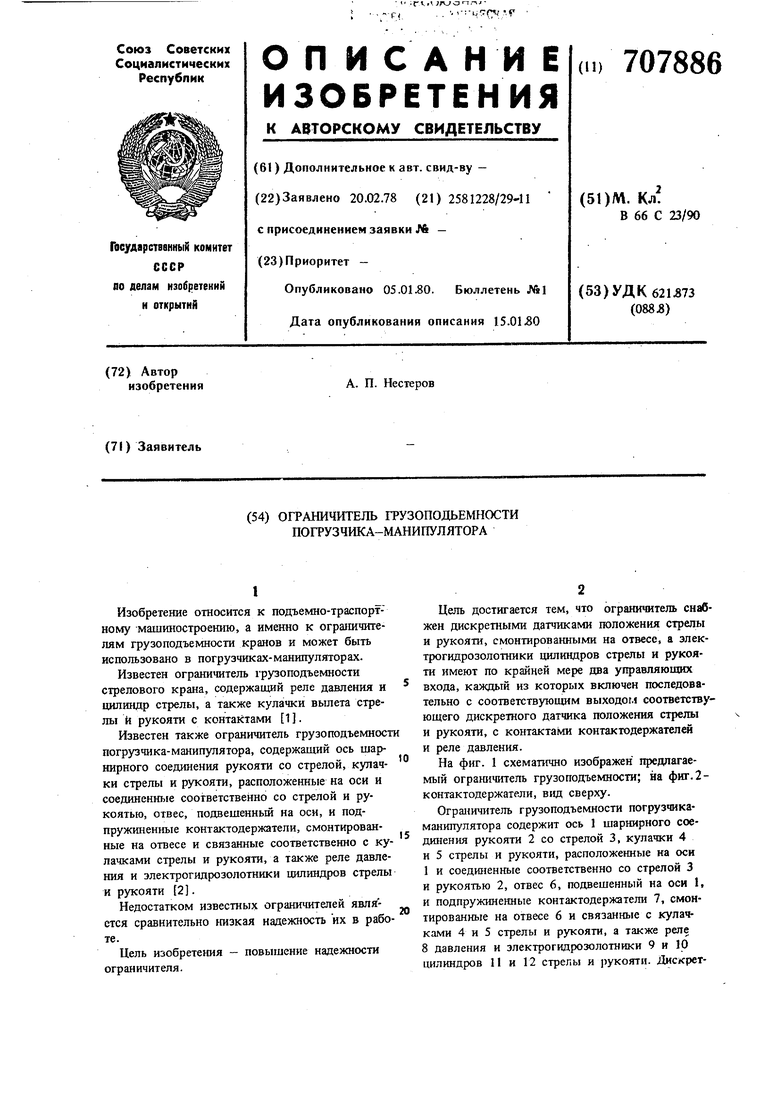
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель грузоподъемности погрузчика-манипулятора | 1975 |
|
SU543611A1 |
| Ограничитель грузоподъемности погрузчика-манипулятора | 1974 |
|
SU496227A1 |
| Ограничитель грузоподъемности погрузчика-манипулятора | 1983 |
|
SU1102766A2 |
| Ограничитель грузоподъемности погруз-чиКА-МАНипуляТОРА | 1979 |
|
SU798024A2 |
| Ограничитель грузового момента погрузчика-манипулятора | 1983 |
|
SU1135712A2 |
| Ограничитель вылета шарнирно-сочлененной стрелы грузоподъемного средства | 1980 |
|
SU935460A1 |
| Ограничитель грузоподъемности для кранов | 1972 |
|
SU449874A1 |
| Ограничитель грузоподъемности стрелового крана | 1959 |
|
SU123304A1 |
| Ограничитель грузоподъемности стрелового крана | 1956 |
|
SU106097A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |