1
Изобретение относится к области автоматизации технологических процессов в машиностроении, а именно к области средств автоматической сборки узлов и изделий с помощью манипуляторов.
Известна машина для сборки деталей, содержащая станины, приводы поступательного перемещения, колонны с манипуляторами, установленные в гнездах станин , систему управления, а также рабочие и загрузочные позиции 1.
В известной машине каждый манипулятор имеет свой привод, а согласование работы осуществляется через систему управления.
Цель изобретения - упрощение конструкции мащины для сборки деталей.
Цель достигается тем, что мащина для сборки деталей снабжена рамками, колонны расположены внутри этих рамок, которые в свою очередь связаны с приводами поступательного перемещения, а на колоннах соосно установлены диски, охваченные
гибкими лентами, концы которых закреплены в .рамках, причем рамки с колоннами расположены друг над другом.
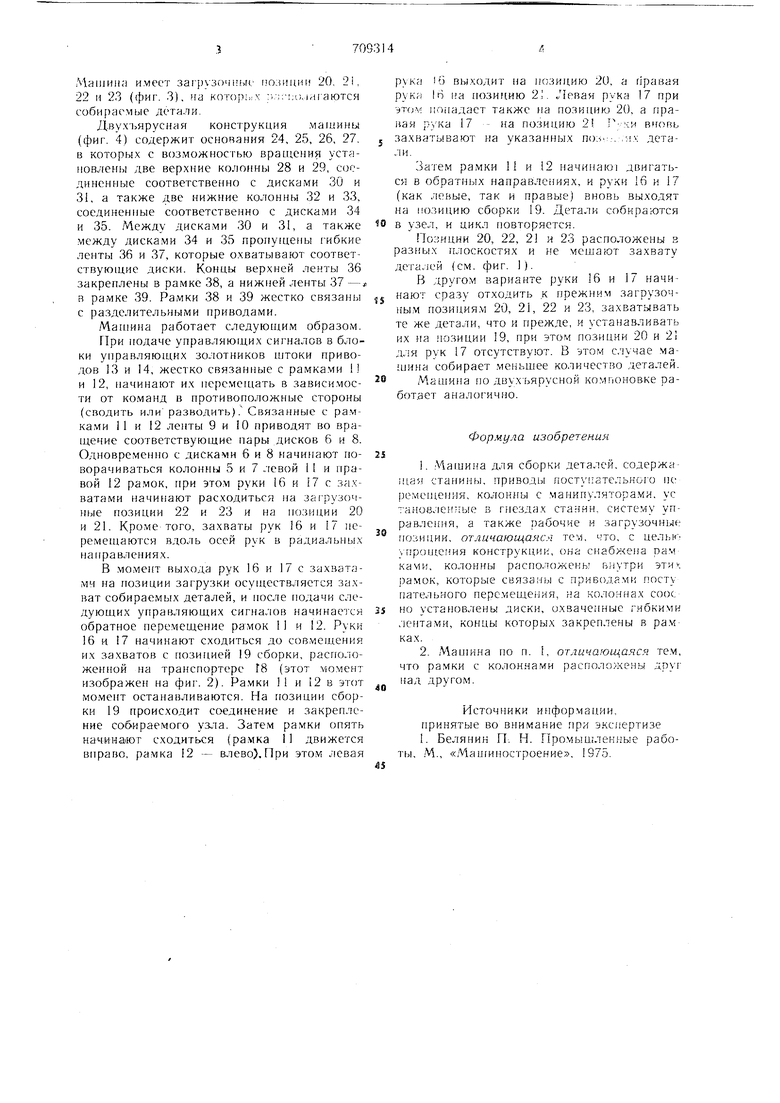
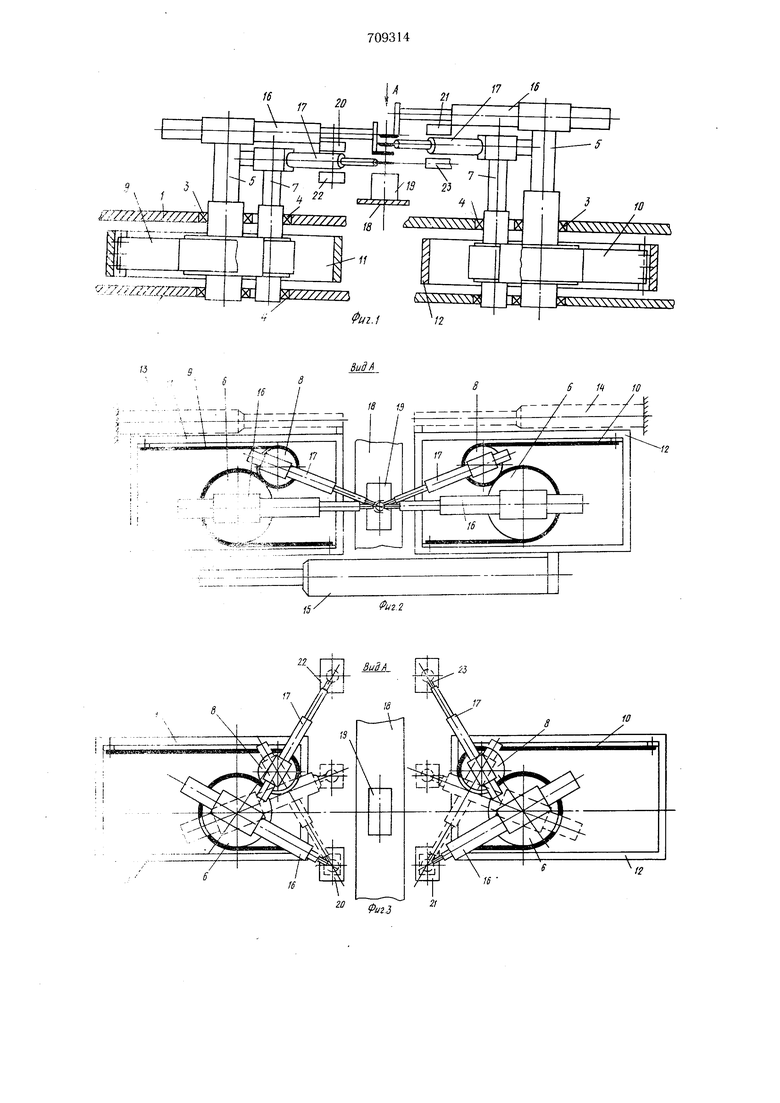
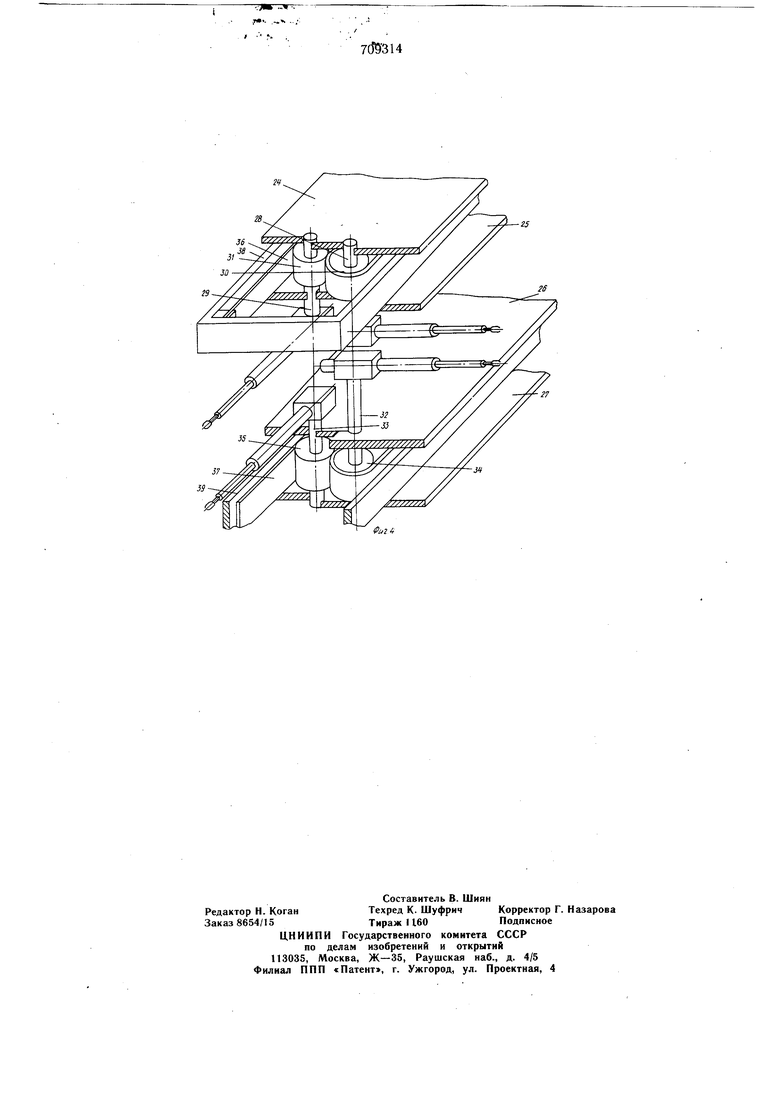
На фиг. 1 изображена предлагаемая машина для сборки деталей; на фиг. 2 - вид А на фиг. 1 (без верхнего основания), когда манипуляторы находятся на рабочих позициях; на фиг. 3 - то же, когда манипулятор находится на загрузочных позициях; на фиг. 4 - двухъярусная компоновка машины для сборки деталей.
Машина для сборки деталей содержит верхнее I и нижнее 2 основания (станины), в которых на подшипниках 3 и 4 соответственно установлены две колонны: колонна 5 с дисками 6 и колонна 7 с дисками 8.
Между дисками 6 и 8 пропущены гибкие металлические ленты 9 и 10, охватывающие диски 6 и 8 и жестко закрепленные в подвижных прямоугольных рамках II и 12. Рамки 11 и 12 соответственно жестко связаны со щтоками пневмо (гидро) приводов 13, 14, рабочие полости которых связаны с блоком управляющих золотников. Рамки могут быть связаны и с общим приводом 15.
На поворотных колоннах 5 и колоннах 7 установлены соответственно руки 16 и 17 манипуляторов с захватами. На ленте транспортера 18 находятся рабочие позиции 19.
Машина имеет за1рузоч1: п. 1озиции 20. 2i, 22 и 23 (фиг. 3), га которь.х : ;;::о,1игаются собираемые детали.
/Двухъярусная конструкция машины (фиг. 4) содержит основания 24, 25, 26, 27. в которы.х с воз.можностью вращения установлены две верхние колонны 28 и 29, соединенные соответственно с дисками 30 и 31, а также две нижние колонны 32 и 33, соединенные соответственно с дисками 34 и 35. Между диска.ми 30 и 31, а также между дисками 34 и 35 пропущены гибкие ленты 36 и 37, которые охватывают соответствую1цие диски. Концы верхней ленты 36 закреплены в рамке 38, а нижней ленты 37 - в рамке 39. Рамки 38 и 39 жестко связаны с разделительными приводами.
Машина работает следуюшим образом.
При иодаче управляющих сигналов в блоки унравляюгцих золотников штоки приводов 13 и 14, жестко связанные с рамка.ми ) и 12, начинают их перемешать в зависи.мости от команд в противоположные стороны (сводить или разводить). Связанные с ра.мками 11 и 12 ленты 9 и 10 приводят во вращение соответствующие пары дисков 6 и 8. Одновре.менно с дисками 6 и 8 начинают поворачиваться колонны 5 и 7 левой 11 и правой 12 рамок, при этом руки 16 и 7 с за.хватами начинают расходиться на загрузочные позиции 22 и 23 и на позиции 20 и 21. Кроме того, захваты рук 16 и 17 иеремеп1аются вдоль осей рук в радиальных направлениях.
В момент выхода рук 16 и 17 с захватами на позиции загрузки осуществляется захват собираемых деталей, и после подачи следующих управляющих сигна;1ов начинается, обратное перемецдение рамок 11 и 12. Руки 16 к 17 начинают сходиться до совмещения их захватов с позицией 19 сборки, расположенной на транспортере Г8 (этот момент изображен на фиг. 2). Рамки 1 1 и 12 в этот момент останавливаются. На нозиции сборки 19 происходит соединение и закрепление собираемого узла. Затем рамки опять начмна1ют сходиться (рамка 11 движется вправо, рамка 12 - влево). При этом левая
рука If) выходит на позицию 20, а г равая рука 16 iia позицию 21. Левая рука 17 при эт(;м попадает также на позипию 20, а правая р) ка 17 на позици.ю 2 Г чи вновь захватывают на указанных поз-;. :их детали.
Затем рамки И и 12 начинаю двигаться в обратных направлениях, и руки 6 и 17 (как левые, так и правые) вновь выходят на позицию сборки 19. Детали собираются в узел, и цикл повторяется.
Поз.чции 20, 22, 21 и 23 расположены в разных плоскостях и не мещают захвату деталей (см. фиг. 1).
В другом варианте руки 6 и 17 начинают сразу отходить к прежним загрузочным позициям 20, 21, 22 и 23, захватывать те же детали, что к прежде, и устанавливать их на позиции 19, при этом позиции 20 и 2 для рук 17 отсутствуют. В этом случае машина собирает меньшее .количество ..четалей. Машина по двухьярусной компоновке работ.ает аналогично.
Формула изобретения
. .Нашюш для сборки деталей, содержа щая станины, приводы поступательного IKремеп1епия, колонны с манипуляторами, ус ranoBcietc-ibie в гнездах стан.чн, систему управления, а также рабочие и загрузочные нозиции, отличающаяся те.м, что, с цельн м рои.е.мия конструкции, она снабжена рам ками, колонны расположены внутри этич рамок, которые связаны с приводами посту нательного перемещения, на колоннах соос но установлены диски, охваченные гибкими /юнта.ми, концы которых закреплены в рам ках.
2. Машина но п. i, отличающаяся те.м, что ра.мки с колоннами расположены друг над другом.
Источники информации, финятые во внимание при экспертизе I. Белянин П. Н. Про.мышленкые работы, М., «Мап1иностроение. 1975. isss: 6 It ;о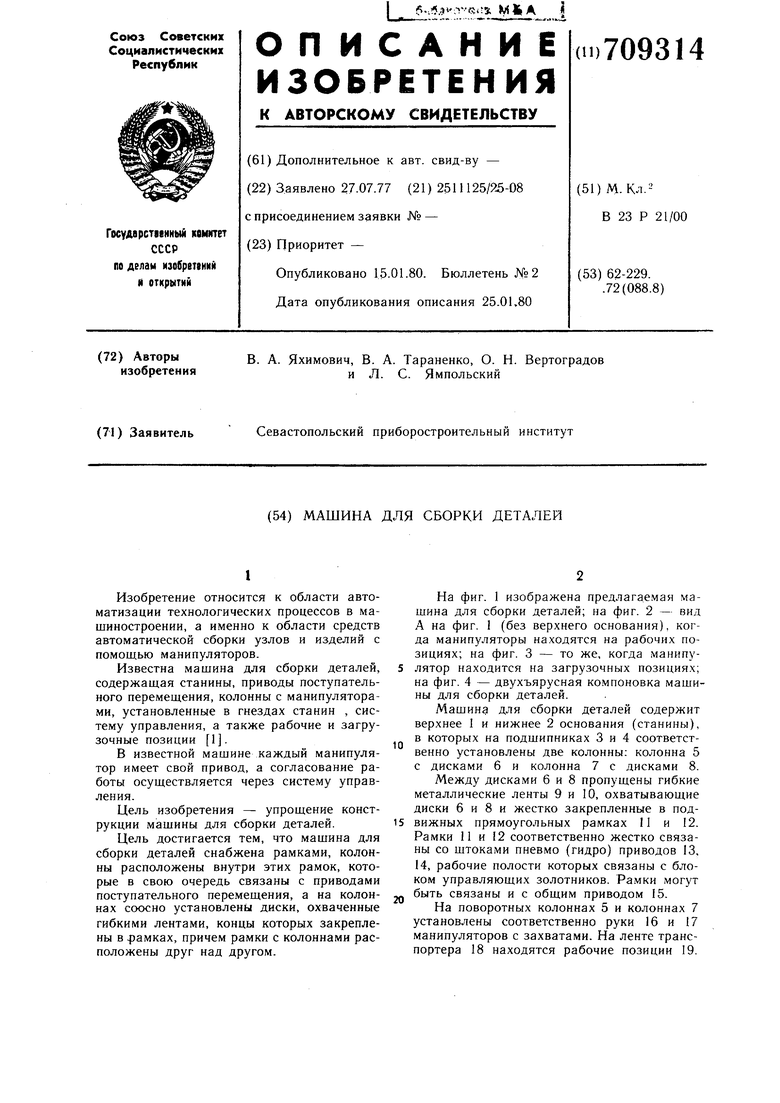
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2023571C1 |
| Сборочный центр | 1985 |
|
SU1311908A1 |
| Автоматическая сборочная линия спутникового типа | 1984 |
|
SU1359095A1 |
| Автомат для сборки деталей | 1986 |
|
SU1435413A1 |
| Автомат для сборки деталей | 1989 |
|
SU1639936A1 |
| Автоматический сборочный комплекс | 1987 |
|
SU1521545A1 |
| Устройство для подачи,комплектования и сборки деталей запрессовкой | 1983 |
|
SU1419846A1 |
| Автоматическая линия центробежного литья в облицованные кокили | 1978 |
|
SU764842A1 |
| Автоматическая линия механической обработки | 1983 |
|
SU1191260A1 |
| Автомат для сборки пакетов магнитопроводов электрических машин | 1988 |
|
SU1534645A1 |
21
гз
25
27
