1
Изобретение относится к области машиностроения, в частности к манипуляторам, предназначенным для загрузки технологического оборудования.
Известен манипулятор, выполняющий захват сориентированной заготовки из устройства поштучной выдачи, поворотом и выдвижением руки со схватом, введение заготовки в зону оборудования, установку ее в оборудование и возвраш.ение в исходное положение 1.
Подобный манипулятор требует установки рядом с ним сопутствуюш,его оборудования: накопителя заготовок, транспортера, механизмов ориентирования и поштучной выдачи заготовок, которые, как правило, имеют пндивидуальные приводы и занимают вместе с манипулятором значительные производственные плош.ади.
Осиаш;ение руки манипулятора ассортиментом сенорных датчиков, позволяющих работать с неориентированными заготовками, требует значительного усложнения конструкции манипулятора.
Предложенный автоматический манипулятор отличается тем, что, с целью упрощения конструкции, механизм ориентирования и поштучной выдачи заготовок установлен на каретке поперечного перемещения руки и кинематически связан с ее приводом посредством сдвоенной реечной передачи и двух обгонных муфт.
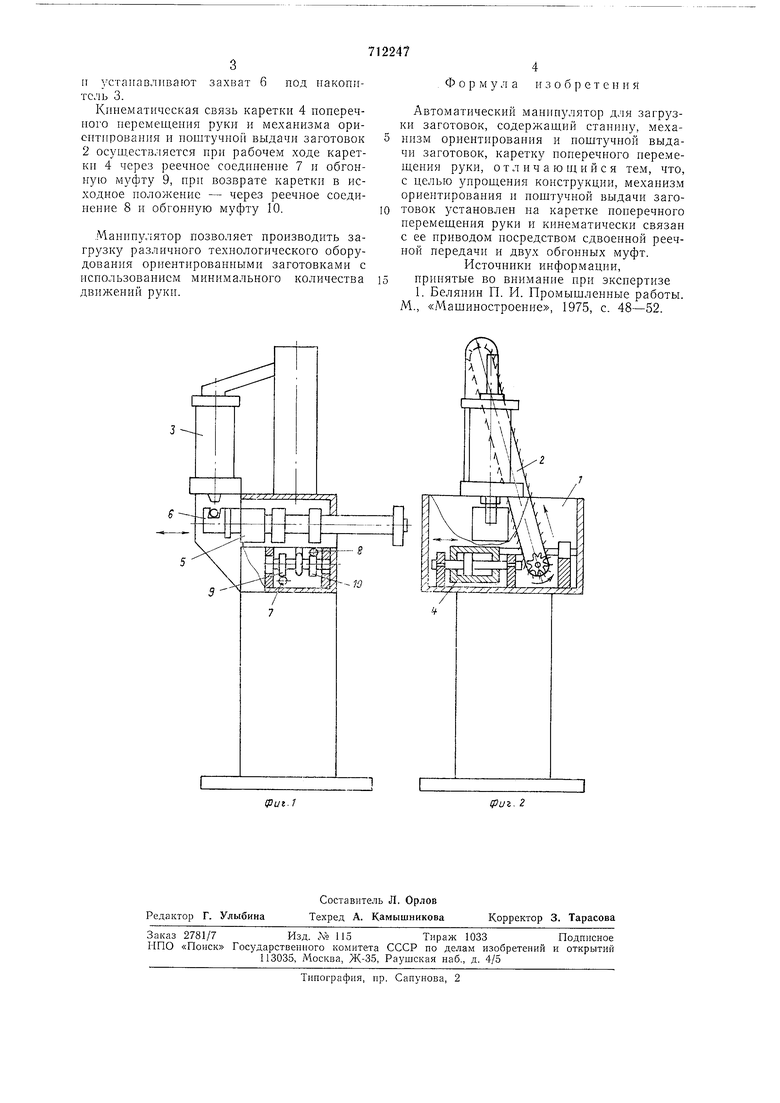
На фиг. 1 и 2 представлен предлагаемый автоматический манипулятор.
Автоматический манипулятор состоит из станины 1, основание выполнено в виде бункера для заготовок, внутри которого размещен механизм 2 ориентирования и пощтучной выдачн заготовок, включающий
накопитель 3, причем механизм 2 ориентирования и поштучной выдачи заготовок установлен на каретке 4 поперечного перемещения руки. На подвижной части каретки 4 поперечного перемещения руки закреплена рука 5 с захватом 6. Механизм 2 ориентирования и поштучной выдачи заготовок связан с приводом каретки 4 поперечного перемещения руки через шаговый механизм, состоящий из двух реечных соединеНИИ 7 и 8 и двух обгонных муфт 9 и 10.
Автоматический манипулятор работает следующим образом.
При очередном цикле заготовка из накопителя 3 попадает в захват 6 руки 5. Выдвижением руки 5 и ходом каретки 4 поперечного перемещения руки заготовка устанавливается в оборудование.
По окончании загрузки оборудования рука 5 и каретка 4 поперечного перемещения
руки возвращаются в исходное ноложенне
ri устанавливают захват 6 под накопитель 3.
Кинематическая связь каретки 4 поперечного неремещення руки и механизма орионтпрования и поштучной выдачи заготовок 2 осуш,ествляется при рабочем ходе кареткн 4 через реечное соединение 7 и обгонную муфту 9, при возврате каретки в исходное положение - через реечное соединение 8 и обгониую муфту 10.
Манипулятор позволяет производить загрузку различного технологического оборудования ориентированными заготовками с использованием минимального количества движений руки.
Формула изобретен и я
Автоматический манипулятор для загрузки заготовок, содержащий станину, механизм ориентирования и поштучной выдачи заготовок, каретку поперечного иеремеш,ения руки, отличающийся тем, что, с целью упрощения конструкции, механизм ориентирования и пощтучной выдачи заготовок установлен на каретке поперечного перемещения руки и кинематически связан с ее приводом посредством сдвоенной реечной передачи и двух обгонных муфт.
Источники информации, принятые во внимание ири экспертизе 1. Белянин П. И. Промыщлеиные работы. М., «Машиностроение, 1975, с. 48-52.
фигФиг. 2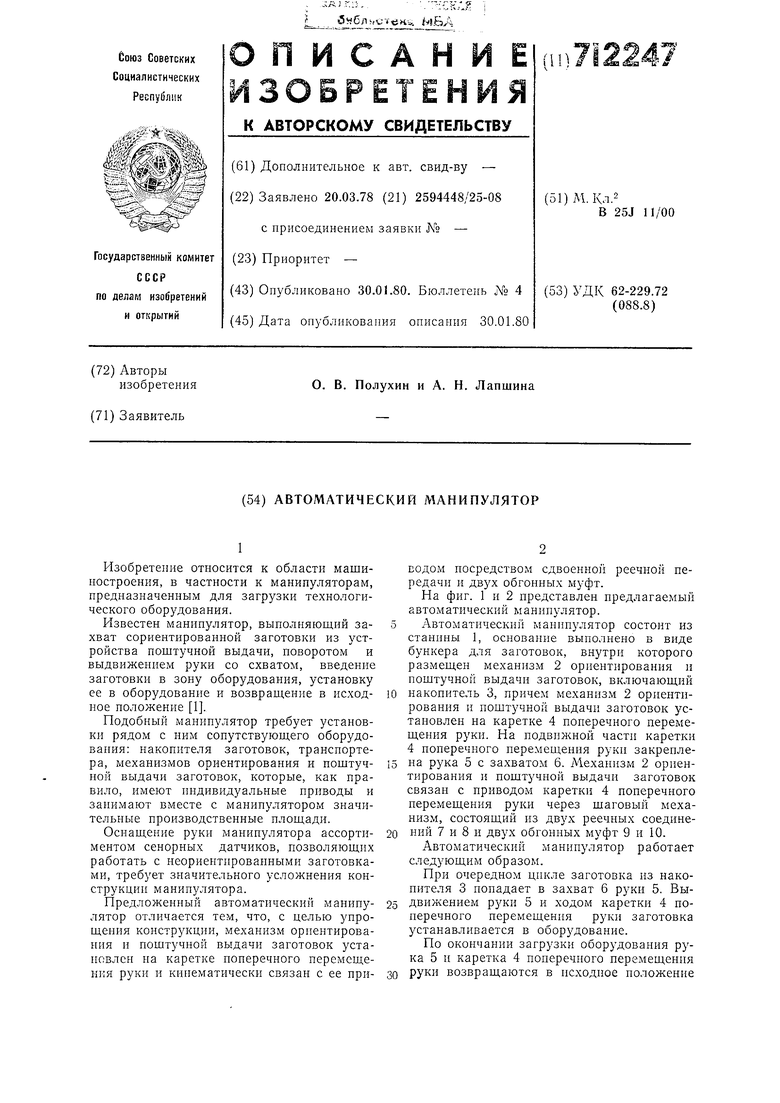
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль | 1986 |
|
SU1404273A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Автоматическая линия безоблойной штамповки | 1980 |
|
SU889482A1 |
| АВТОМАТ ДЛЯ ШЛИФОВАНИЯ КАНАВОК И СПИНОК СВЕРЛ | 1971 |
|
SU295650A1 |
| Агрегат для брикетирования штучных изделий | 1976 |
|
SU653136A1 |
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1328036A1 |
| Способ автоматической подачи заготовок в технологическое оборудование и устройство для его осуществления | 1984 |
|
SU1301690A1 |
| Автоматическая линия | 1985 |
|
SU1296373A1 |
| Устройство для подачи заготовок в пресс | 1984 |
|
SU1278249A1 |
