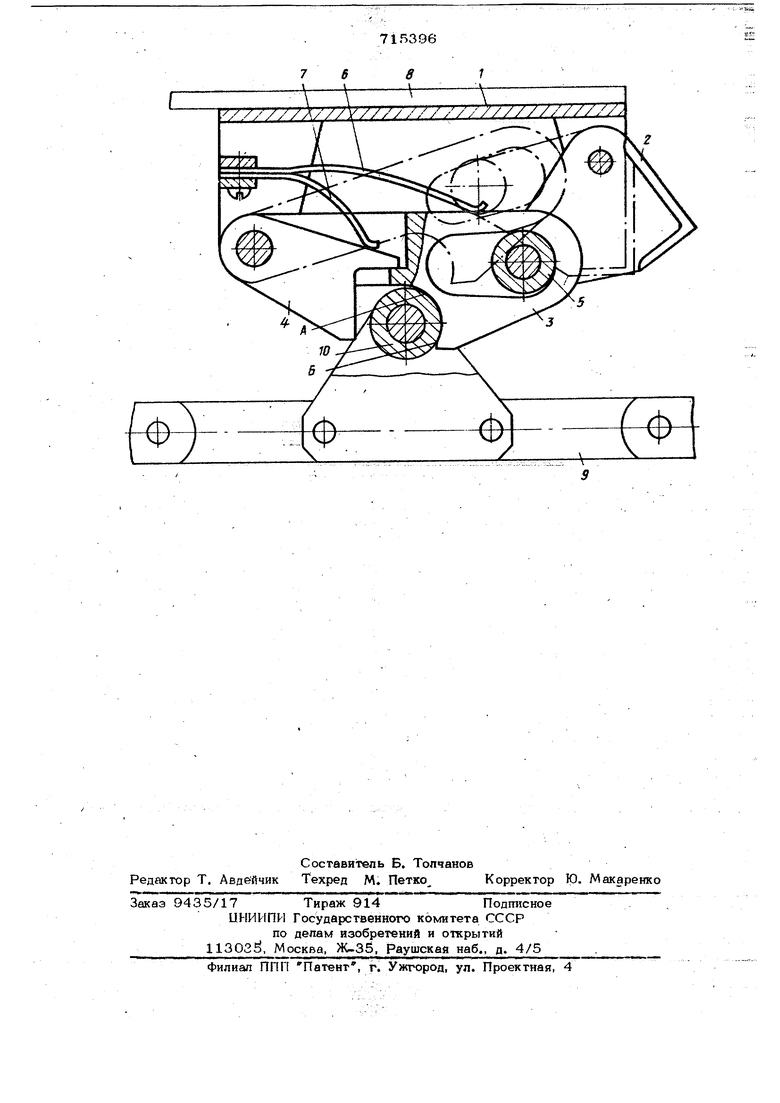
. : . I изобретение относится к области транспортных средств и касаетсгя уст- роиста по мехакизапии независимого, транспортирования элементов садки (стол(биков) сырпа огнеупорной) кирпича, изготавливаемого методом полусухого прессования, а также других областей механизапйи транспортирования с адресной остановкой, накфимер сборочные конвейеры в машиностроении. Известна каретка подвесного толкаюсг щего конвейера, включающая толкающий кулак, связанный с рычагом, имеющим на одном конце ролик, взаимодействующий р шиной механизма останова 1 . Недостатком данного изобретения явля ется ненадежность в работе, т.е. по первому и второму вариантам имеет место произвольное расцепление каретки с тележкой, по третьему варианту запорное устройство сложно по конструкции и также ненадежно, и кроме того, невозмож. но отключить тележки от тягового органа в случае механического препятствия движению тележки. ,: Известен механизм автоматического сцепления и расцепления тележек вертикально-замкнутого конвейера с тяговой цепью, включающий корпус и шарнирно соединенный с ним крюк с тяговой поверхностью, собачку и подъемник . Недостатками данной конструкции является то, что при накоплении тележек, собачки, установленнб7е в кабинах, будут срабатывать проходя над тележкой, что влечет за собой дополнительный износ деталей транспортера, а также при взаимодействии собачек друг с другом и с другими деталями транспортера имеет место трЪние скольжения, что неизбежно ведет к повышенному износу деталей и, следовательно, снижению надежности транспортера в работе. Целью настоящего изобретяния является повышение надежности в работе, Поставленная цель достигается тем, что подъемник снабжен роликом, а крюк выполнен с пазом, в котором размещен с возможностью перекатывания роляк йодъёШйка, при 9ТУ С1Т я ювЙ Ш15ё рХ ность кр1ока выполнена по радиусу со скосом в ниисней его qaciTi, а крюк и собачка подпружинены. На чертеже схематически изображен ,j exaHH3M автоматического сцепления и расцепления тележек К корпусу 1 н§ осйх nOjaieMник 2, крюк 3 и собачка 4, причем крюк 3 и собачка 4 находятся на одной оси. Крюк 3 имеет прорезь для р азмещения собачки 4 и пазГвйотором перёкатывается ролик 5 подъемника 2, сидящий на . оси, закрепленной на подъемнике 2,и тяговую поверхность S, выпопнешуБп6 радиусу со скосом Б в нижней части. К корпусу 1 также прикреплены пластинчатые пружины 6 и 7, упирающйеся свободными концами в крюк 3- и собачку 4.МеХанизМ автоматического сцепления , и расцепления крепится, болтами к тележке 8,, На тяговой цепи 9 с шагой, зависящим от длины конвейера и количества тележек, установлены ролики 1О. Механизм автоматического сцепления и расцепления работает следующим образом: крюк 3 находится в зацеплении с роликом 10 тяговой цепи 9. При упоре подъемника 2 в стоящую BftepejitH тележку или специально выдвигаемый упор, rtonbeNfHHK 2 начинает повора чйваться вокруг оси, а ролик 5 подъемника 2 при Этом перекатывается в пазу крюка 3, поднимает его. Ропик 10 цепи , 9, обкатываясь по тяговой поверхности А и скосу Б, выходит ИЗ зайепления с ком 3, и теленска останавливается. У стоящей теленоси крюк 3 находитсй в поднятом положении, (на чертеже показано штрих-пунктирной линией), и ролики 10 непрерывно-движущейся цепи 9 свободно ; проходят под ним. Как только препятствие (упЬр, впереди стоящая тележка и т.п.) будет убрано, ос вобождёйвйё подъёмник 2 и крюк 3 под действием собственного весаищэужин 3aMN{ r йсШйШё ® Ролик 10 цепи 9 поднимет собачку 4, зацепится за тяговуЬ поверхностькрюка 3, и тележка будет перемещаться. После прохода ролика 10 под собачкой 4 последйяя оп5с п1тся и темсамым исключит возможнбсть самопроизвольного отката или отставания тележки. Для того, чтобы крюк 3 самопроизвольно не выходил из зацепления с роликом 10 цепи 9 на криволинейных участках конвейера, тяговая поверхность крюка 3 имеет скос Б в нижней части. Чтобы при движении тележки в перевернутом положении не происходило саморасцепление крюка 3 с роликом 10 цепи, 9 в случае остановки цепи 9, крюк 3 и собачха 4 подпружинены пластинчатыми пружинами 6, 7. Собач1са 4 Т(акже служит для предупреждения саморасцеппения крюка 3 и ролика 10 цепи 9 при остановке цепи и при движении тележки на криволинейном участке конвейера. Применение механизма по предлагаемой заявке обеспечит надежность работе вертикально-замкнутых и других тележечных конвейеров, позво пит исключить тяжелый ручной труд при транспортировке столбиков огнеупорных изделий. Формула изобретения Механизм автоматического сцепления и расцепления тележки вертикально-замкнутого конвейера с тяговой цепью, включаюший корпус и шарнирно соединенный, с ним крюк с тяговой поверхностью, собач у ц подъемник, отличающийся teM, что, с целью повышения надежности работе, подъемник снабжен роликом, крюк выполнен с пазом, в котором размещен с возможностью перекатывания ролик подъемника,) при этом тяговая поверхность крюка выполнена по радиусу со скосом в нижней его части, а крюк и собач1са подпружинены. Источники информации, принятыево внимание при экспертизе 1. Авторское свидетельство СССР В 65 Q 17/32, 1964. . Патент Великобритании № 1385016, кл. В 7 Ь t опублик. 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейер | 1982 |
|
SU1105401A1 |
| Тележечный конвейер | 1980 |
|
SU918198A1 |
| Грузовая тележка подвесного толкающего конвейера | 1975 |
|
SU597601A1 |
| Тележечный конвейер | 1975 |
|
SU530829A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 2003 |
|
RU2247815C1 |
| Транспортерное устройство | 1937 |
|
SU54413A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩЕГО СРЕДСТВА С ГРУЗОВОЙ ПЛАТФОРМЫ ПОДЪЕМНИКА НА ПЛОЩАДКУ ПОГРУЗКИ-РАЗГРУЗКИ | 1999 |
|
RU2152340C1 |
| Подвесной толкающий конвейер | 1980 |
|
SU905160A1 |
| Транспортная система | 1982 |
|
SU1167115A1 |
| Подвесной несуще-грузоведущий конвейер | 1984 |
|
SU1156978A1 |