(54) АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКИХ ЛИНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЁРАТОР для ГАЛЬВАНИЧЕСКИХ ЛИНИЙ | 1973 |
|
SU379682A1 |
| Автооператор для гальванических линий | 1980 |
|
SU901370A1 |
| Автооператор для гальванических линий | 1981 |
|
SU947232A1 |
| Автооператор для гальванических линий | 1980 |
|
SU908716A1 |
| Автооператор для гальванических линий | 1981 |
|
SU990889A1 |
| Автооператор для гальванических линий | 1981 |
|
SU1044685A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| Автооператор | 1987 |
|
SU1574694A1 |
| КАНТОВАТЕЛЬ ДЛЯ СБОРКИ И СВАРКИ ИЗДЕЛИЙ | 2004 |
|
RU2281844C2 |
| Линия для химического фрезерования крупногабаритных изделий | 1987 |
|
SU1497278A1 |
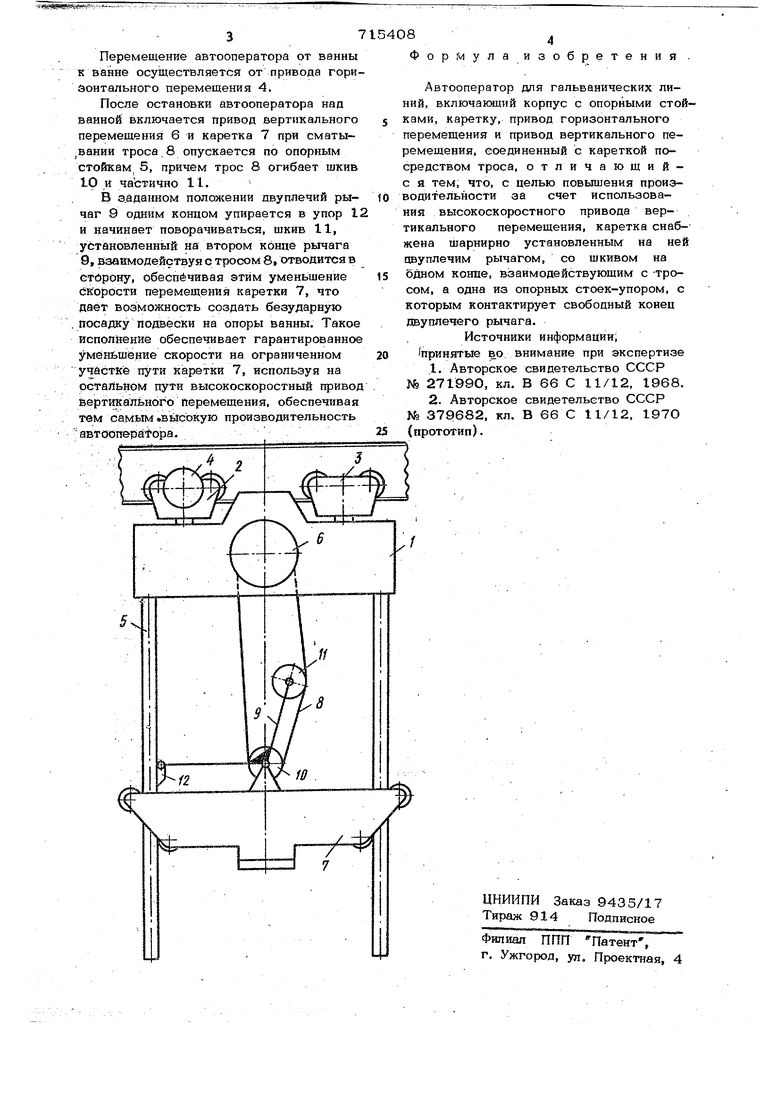
Изобретение относитсяК нанесению гальванических покрытий и может быть использовано в гальванических цехах машиностроительных заводов. Известны автооператоры для гальванических линий, содержащие раму с опорными катками, на вертикальные стойки которой опираются ролики каретки, и при воды горизонтального и вертикального перемещения | l3Недостатком таких автооператоров яв ляется их низкая надежность и невысока производительность. Известен автооператор для гальванических линий, включающий раму с опорными стойками, каретку, привод горизонтального перемещения и привод вертикального перемещения, соединенный с кареткой посредством троса J, Недостатком данного автооператора является низкая производительность, ввиду малой скорости привода механизма вертикального перемещения. Целью описываемого изобретения является устранение указанных недостатков, а именно повышение производительности за счет использования высокоскоростного привода вертикального перемещения каретки. Указанная цель достигается за счёт того, что каретка снабжена шарнирно установленным на ней двуплечим рычагом со шкивом на одном конце, взаимодействующим с тросом, а одна из опорных стоек - упором, с которым контактирует свободный конец двуплечего рычага. На чертеже изображен описываемый автооператор для гальванических линий. Автооператор состоит из корпуса 1 с катками 2 и 3, привода горизонтального перемещения 4, опорных стоек 5, привода вертикального перемещения 6, каретки 7, троса 8, двуплечего рычага 9, шкива Ю, дополнительного шкива 11 и 12. Автооператор работает слепующим образом.
