(5 i) ЗАХВАТ КРАН A4UT АБЕЛЕ РА
I
Изобретение относится к промышленному транспорту, в частности, к кранам-штабелерам для длиномерных грузов, и момет быть применено в различных областях - в машинах, манипулирующих с длиномерными изделиями,
Известен захват крана-штабелера, преимущественно для длиномерных изделий, содержащий закрепленную на грузоподъемнике крана-штабелера несущую плиту, снабженную направляющими катками, в которых установлена выдвижная от привода плат(|юрма, и грузовую площадку 1,
Недостатками конструкции являются сложность конфигурации и изготовления выдвижных секций, высокие требования к точности взаимного расположения осей катков и шестерен, а также точности установки зубчатых реек, ограниченная долговечность катков и направляющих. Конструкция ненадежна ввиду большого количества катков и осей.
Цель изобретения - упрощение конструкции захвата и повышение его долговечности и надежности.
Это достигается тем, что несущая . плита закреплена с возможностью поворота в горизонтальной плоскости, при этом привод .выдвижной платформы снабжен кривошипом конец которого соединен с одним из концов упомянутой платформы, грузовая площадка выtoполнена в виде диска, шарнирно npty крепленного посредством вертикальной оси к другому концу выдвижной платформы.
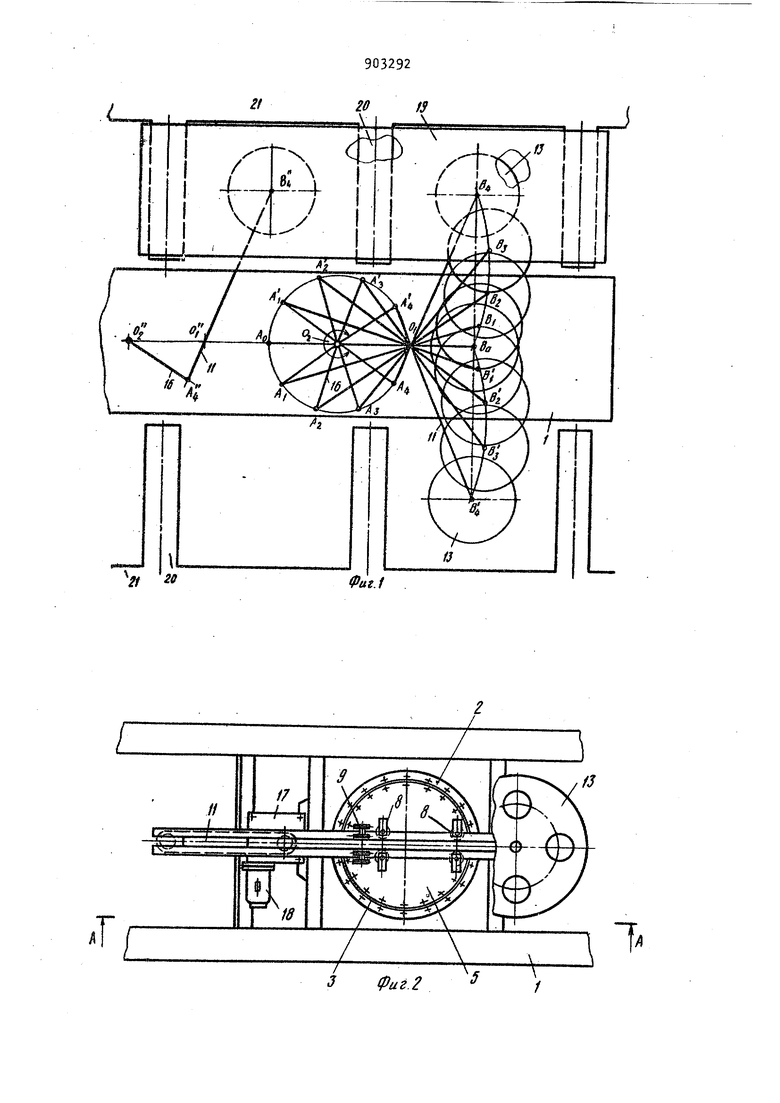
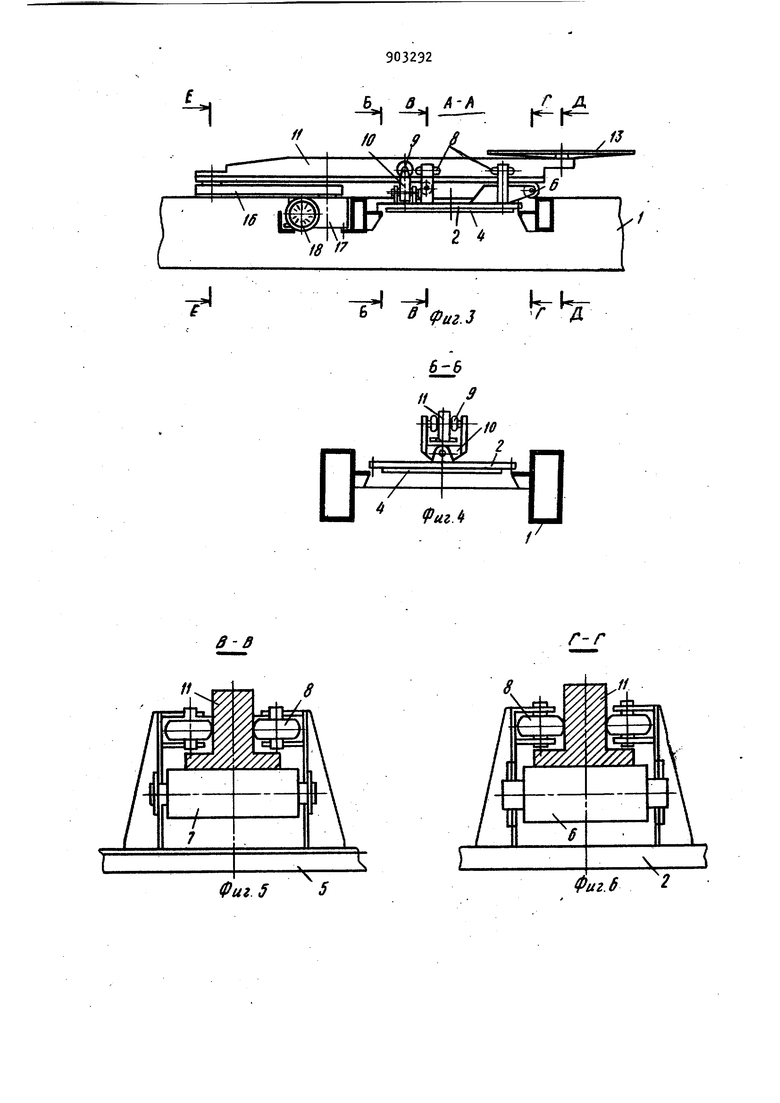
На фиг. изображен предлагаемый захват, кинематическая и габаритная, схемы; на фиг. 2,- то же, вид сверху; на фиг. 3 разрез А-А на фиг. 2; на фиг k - разрез Б-Б на фиг.З; на
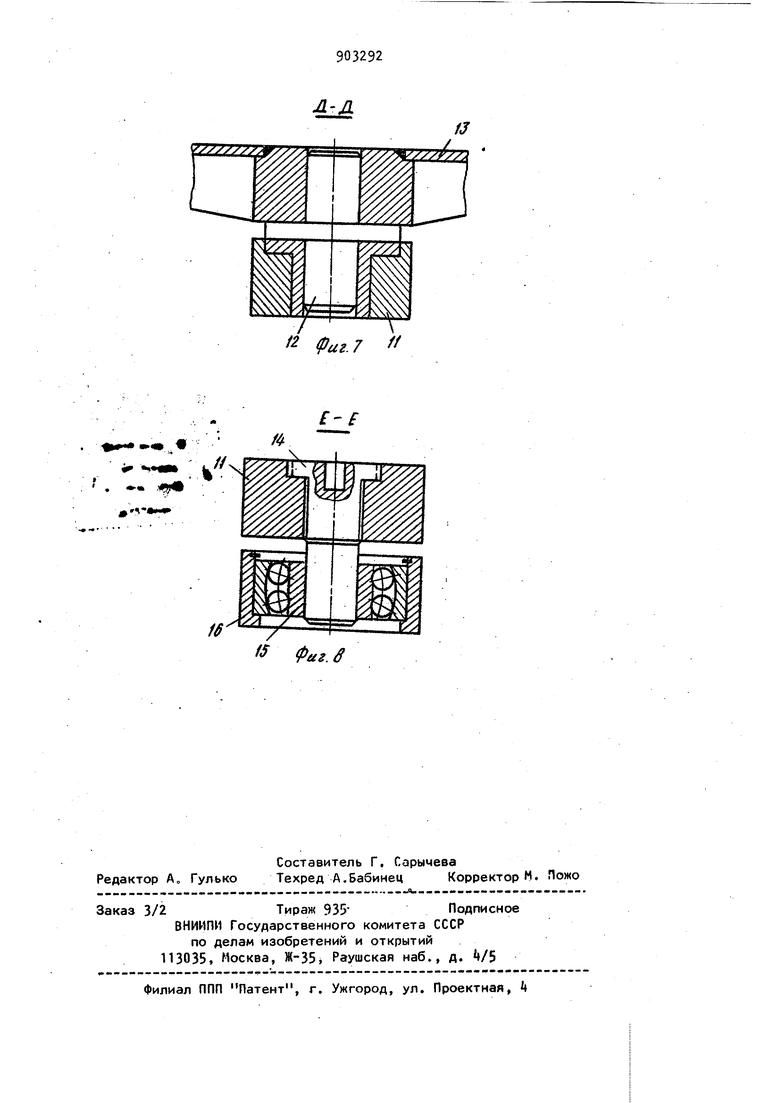
20 фиг. S - разрез В-В на фиг,3; на фиг, 6 - разрез Г-Г на фиг.З, на фиг. 7 разрез Д-Д на фиг.3;на фиг.8 разрез Е-Е на фиг. 3.
39
Захват крана-штабелера содержит закрепленное на грузоподъемнике 1 наружное кольцо 2 поворотной опоры 3 (например роликовой), на внутреннем копоце которой установлена с возмон;ностью поворота в горизонтальной Г : пскости несущая плита 5, на кото. л смонтированы нижний опорный каi;;K 6, вспомогательный нижний каток /, боковые катки 8 и верхние катки 9 установленные на балансире 10, в системе которых может свободно перемещаться выдвижная платформа По На переднем конце платформы 11 установлена шарнирно-поворотная с помощью i вертикальной оси 12 (фиг„ 7) грузова площадка 13 в виде диска, а другой конец посредством оси (фиг. о)
,
и сферического подшипника 15 шарнирно соединен с концом кривошипа 16,, Другой конец кривошипа Тбнасажен на выходной вал редуктора 17j получающего вращение от электродвигателя 18 (или от вала центрального привода) . Для переработки длиномерных гру зов 19 грузоподъемное средство, например кран-штабелер, должно быть оснащено не менее, чем двумя предлагаемыми грузовыми захватами, обеспечивающими укладку груза 19 на консоли 20 стеллажа 21. Грузовая площадка 13 выполнена в виде диска для того, чтобы проекция ее габарита на продольную вертикальную плоскость, например проходящую через , а также продольный габарит выдвижной части 11 и 13 оставались неизменными при развороте рассматриваемой площадки 13 относительно выдвижной секции 11, что необходимо для обеспечения свободного прохождения грузовой площадки 13 в пространство между консолями 20 стеллажа 21,
Работа захвата осуществляется следующим образом.
При работе электродвигателя 18 кривошип 16 поворачивается относительно оси 02 редуктора 17 так, что его конец перемещается по круговой траектории от среднего положения А до крайнего положения Ад в одну сторону или А в другую сторону По такой же траектории движется связанный с указанным концом кривошипа конец выдвижной платформы 11, которая перемещается в системе направляющих катков 6-9, поворачиваясь одновременно вокруг оси 0 поворотной опоры 3, так что другой конец выдвижной секции, являющийся центром грузовой площадки 13, перемещается от начального положения BQ до крайнего положения В. в одну сторону или В в другую сторону. Положение характерных точек соседнего захвата в одном из крайних положений обозначено точками 02, А . 0 , (фиг. 1).
Устройство привода захвата через ось 0. кривошипа 16, а не через посредство зубчатого венца поворотной опоры 3, обусловлено тем, что привод через ось 02 обеспечивает существенно меньшие потери на трение и следовательно, меньшую необходимую мощность электродвигателя и габариты редуктора.
Длиномерный груз 19, расположенны на грузовых площадках 13, при работе захвата перемещается поступательно, при этом грузовые площадки 13 поворачиваются на своих осях 12 вследствие изменения угла между осями груза 19 и выдвижной платформы 11, Нижняя опоная .поверхность выдвижной платформы 11 перекатывается по цилиндрическому катку 6, контакт с которым всегда обеспечен по всей ширине опорной поверхности за счет того, что верхние катки 9 установлены на балансире 10. Вспомогательный нижний каток 7 предназначен для восприятия силы тяжести выдвижной платформы 11, в ее среднем положении при отсутствии груза 19 на грузовой площадке 13 что позволяет разгрузить кривошип 16 от вертикальной нагрузки. При наличии груза 19 на грузовой площадке 13, а также в выдвинутом состоянии порожнего захвата, каток 7 не работает о Для компенсации упругих деформаций выдви 1 ной платформы 11 и возможных неточностей сборки шарнирное соединение концов выдвижной платформы 11 и кривошипа 16 выполнено в помощью сферического под1Уипника 15, примем ось 1i, жестко связанная с выдвижной платформой 11, входит во внутреннее кольцо подшипника 15 по ходовой посадке Грузобой момент от сил тяжести груза 19 и захвата воспринимается поворотной опорой 3 (например роликовой)„
Конструкция захвата на содержит сложных в изготовлении деталей, проста в монтаже и удобна при техническом обслуживании и ремонте ввиду 59 свободного доспута ко всем узлам и деталямо Ввиду того, что выдвижная платформа П опирается на катки 6 и 9, усилия в указанных катках точно определяются расчетом, так как данное положение является статически определимым и не зависит от последующего износа катков и контактирующих с ними поверхностей выдвижной платформы 11, вследствие чего можно обеспечить необходимую заданную долговечность указанных элементов путем надлежащего назначения конструктивны размеров и материалов. Ввиду того, что конструкция захвата содержит малое количество осей и катков, надежность конструкции повышается. Себестоимость предложенной конструкции захвата значительно ниже известных в связи с простотой конструк тинных элементов и сборки, а также технологичности изготовления. Формула изобретения Захват крана-штабелера, преимущественно для длиномерных грузов, со 2 держащий закрепленную на грузоподъем-. нике крана-штабелера несущую плиту, снабженную направляющими катками, в которых установлена выдвижная от привода платформа, и грузовую площадку, отличаютдийся тем, что, с целью упрощения конструкции, ловышения его надежности и долговечности, несущая плита закреплена с возможностью поворота в.горизонтальной плоскости, при этом привод выдвижной платформы снабжен кривошипом, конец которого соединен с одним из концов упомянутой платформы, а грузовая площадка выполнена в ,виде диска, шарнирно прикрепленного посредством вертикальной оси к другому концу выдвих ной платформы о Источники информации, принятые во внимание при экспертизе 1. Патент Швейцарии tf 5238 8, кл. В 66 F 9/t, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1131779A1 |
| Перегружатель штучных грузов | 1982 |
|
SU1022876A1 |
| Телескопический захват | 1986 |
|
SU1463646A1 |
| Склад для хранения штучных грузов | 1977 |
|
SU735494A1 |
| КОМПЛЕКТОВОЧНЫЙ КРАН —ШТАБЕЛЕР | 1974 |
|
SU380105A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Грузоподъемник крана-штабелера | 1977 |
|
SU678005A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Грузоподъемная площадка крана-штабелера | 1980 |
|
SU981126A1 |
| Телескопический захват для грузоподъемных машин | 1975 |
|
SU649640A1 |
7 Л, -И l-kТл
в Фиг.З
ilL // 3
to
/ JL
игЛ
S-d
8
Фиг. 5
Г-Г
11
S
Фиг. 6 2
Id
f Фиг. e
