I
Изобретение относится к промышпенному транспорту, в частности к телескопическим захватам стеллажных кранов - штабелеров.
Известен телескопический захват, содержащий основание и смонтированные на нем подвижные среднюю и верхнюю грузонесущую секцщ, направляющие, расположенные на средней секции, и контактирующие с ними катки, за:крепленные на основании и верхней секции.
В известном захвате средняя и верхняя секции перемещаются по каткам, установленным на запрессованных в металлоконструкций секций консольных осях 1 .
Недостатке известного устройства является то, что нагрузки от веса при выдвинутом захвате воспринимаются в основном двумя Крайними катками, что снижает их надежность и долговечность и увеличивает износ как наМравляющих,так и самих катков.
Цель изобретения - повышение надежности и долговечности катков.
Поставленная цель достигается тем, что телескопический захват снаб-: жен щарнирно прикрепленньми к основанию и верхней секции балансирами, при этом одни концы осей каждой пары прикреплены к каждому балансиру, а в основании и в верхней секции выполнены отверстия для размещения в
10 них с зазором других концов упомянутых осей.
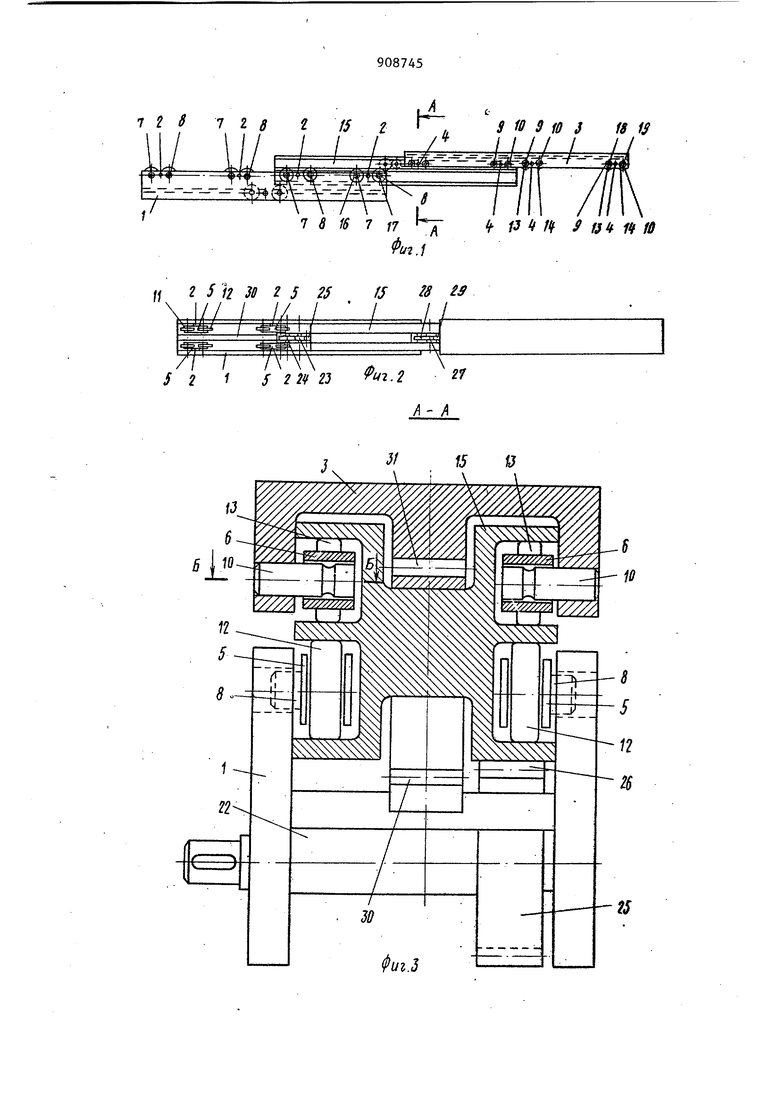
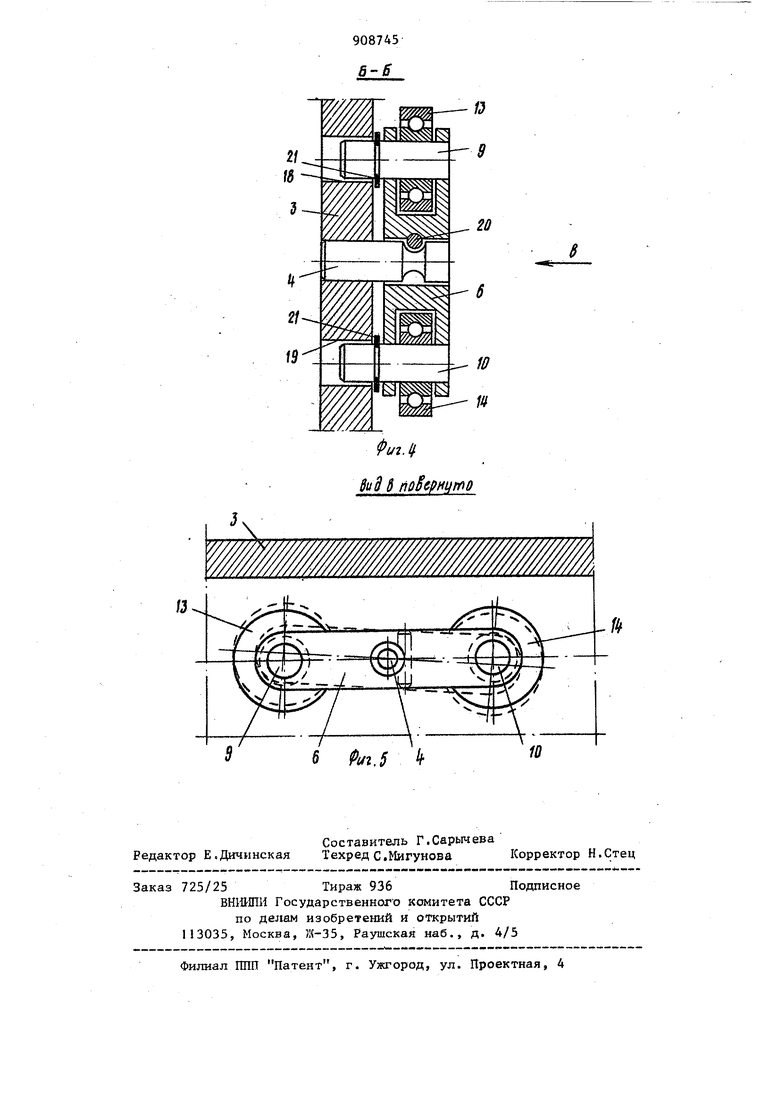
На фиг. 1 показан телескопический захват, вид сбоку, йа фиг. 2 то же, вид сверху; на фиг. 3 - сеtsчение А-А на фиг. 1 -, на фиг. 4 - сечение Б-Б на фиг. 3; на фиг. 5 - вид Bi на фиг. 4.
Телескопический захват имеет основание 1, жестко установленное на
20 грузоподъемнике крана - штабелере не показан). На осях 2, закрепленных в основании 1 , и закрепленных на верхней секции 3 осях 4, шарнир3- 9 но установлены двухвильчатые баланси ры 5 и 6, в которых на осях 7-10 на подшипник X установлены катки 11-14. Причем оси 7-10 выполнены удлиненными. Катки 13 и 14 перемещаются по средней секции 15, а та, в свою ©чередь, перемещается по каткам 11 и 12. Свободные концы осей 7 и 8 входят с зазором в отверстия 16 и 17 основания I, а свободные концы осей 9 и 10 входят с зазором в отверстия 18 и 19 верхней грузонесущей секции 3, величина зазора позволяет регулировать угол поворота балансиров 5 и 6. Двухвильчатые балансиры 5 и 6 от горизонтального перемещения на осях 2 и 4 удерживаются штифтами 20, чего оси 2 и 4снабжены кольцев-ой ироточкой. Оси 7-10 удерживаются от горизонтального перемещения шайбами 21. Движение телескопического захвата осуществляется приводом (не показан) который через муфту соединен с валом 22.На валу 22 установлена шестерня 23,которая взаимодействует с шестер нями 24 и 25, которые, .в свою очередь, взаимодействуют с рейкой 26, установленной на средней секции 15. На средней секции 15 ycTaHOBj na шестерня 27, вйаимодействующая с шес тернями 28 и 29, которые также установлены на среднейсекции 15, Шестерни 28 и 29 взаимодействуют с рейками 30, закрепленными на основаниях 1 и 31, установленными на верхней секции 3. При выдвинутом захвате консольные нагрузки от груза воспринимаются рав номерно катками 11, 12 и 13, 14, так как при отклонении осей выдвижных секций от горизонтальной оси происходит копирование катками 11-14 поверхности направляющей средней секции, таким образом обеспечивается постоянный контакт катков П-14 с направляющими и, как след,ствие, равномерное распределение нагрузки. Захват работает следующим образом При включешш привода (не показан с помощью зубчато-реечной передачи секции 3 и 15 выдвигаются внутрь стеллажа (не показан) и при .подъеме грузоподъемника крана-штабелера с захвате верхняя секция снимает груз со стеллажа, после чего секции перемещаются в исходное положение с грузом . При возвращении верхней секции 3 и средней секции 15 в исходное положение катки 11-14 беспрепятственно входят в направляющие средней секции 15, так как поворот двухвильчатых балансиров 5 и 6 ограничен зазорами между осями 7-10 и отверстиями 16-19. Использование изобретения обеспечивает увеличение надёжности и долговечности катков и уменьшение износа направляющих. Экономический эффект в народном хозяйстве от одного стеллажного автоматического крана-штабелера г/п 1 т.е., в котором используется предлагаемый захват, составляет 20000 руб. Формула изобретения Телескопический захват, содержащий основание и смонтированные на нем подвижные среднюю и верхнюю грузонесущую секции, направляющие, расположенные на средней секции, и контактирующие с ними катки, закрепленные на основании и верхней секции, отличающийся тем, что, с целью повышения надежности и долговечности, он снабжен шарнирно прикрепленными к основанию и верхней секции балансирами, при этом одни концы,.осей каждой пары катков прикреплены к каждому балансиру, а в основании и в верхней секции выполнены отверстия для размещения в них с зазором других концов упомянутых осей. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №737355, кл. В 66 F 9/12, 1977 (прототип) . 1 2 s 1 г s г 15 г « I I.- Г------- .j; :;Y--3e- M 1 8 16 7 17
11 2 5 12 30 2 S 2 fS 3 /
4.,
/ f -. 7 L
и- /1 S 10 9 10 18 IS - 1JM:-1-- f /J « /# П №

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1024393A1 |
| Транспортно-накопительная система | 1988 |
|
SU1682255A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Телескопический грузозахват | 1983 |
|
SU1081081A1 |
| Телескопический захват | 1986 |
|
SU1463646A1 |
| Кран-штабелер | 1982 |
|
SU1055696A1 |
| Телескопический грузозахват стеллажного крана-штабелера | 1986 |
|
SU1382768A1 |
| Захват крана-штабелера | 1980 |
|
SU903292A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1983 |
|
SU1181953A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
«J
гг 6-6
Фиг. 8иЗ 6 fioSepHijrftO
