(54) ПОДВЕСНОЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной конвейер | 1972 |
|
SU578230A1 |
| Подвесной грузонесущий конвейер | 1973 |
|
SU703435A1 |
| Подвесной конвейер для транспортирования длинномерных грузов | 1977 |
|
SU652057A2 |
| Подвесной конвейер для транспортирования длинномерных грузов | 1974 |
|
SU581020A1 |
| Подвеска подвесного конвейера | 1978 |
|
SU749748A1 |
| Устройство для испытания кареток подвесного конвейера | 1975 |
|
SU603618A1 |
| Подвесной грузонесущий конвейер | 1975 |
|
SU581021A1 |
| Подвесной конвейер для транспортировки длинномерных грузов | 1981 |
|
SU988682A1 |
| Устройство для поворота подвесок конвейера | 1977 |
|
SU631397A2 |
| Подвесной грузонесущий конвейер | 1971 |
|
SU437669A1 |
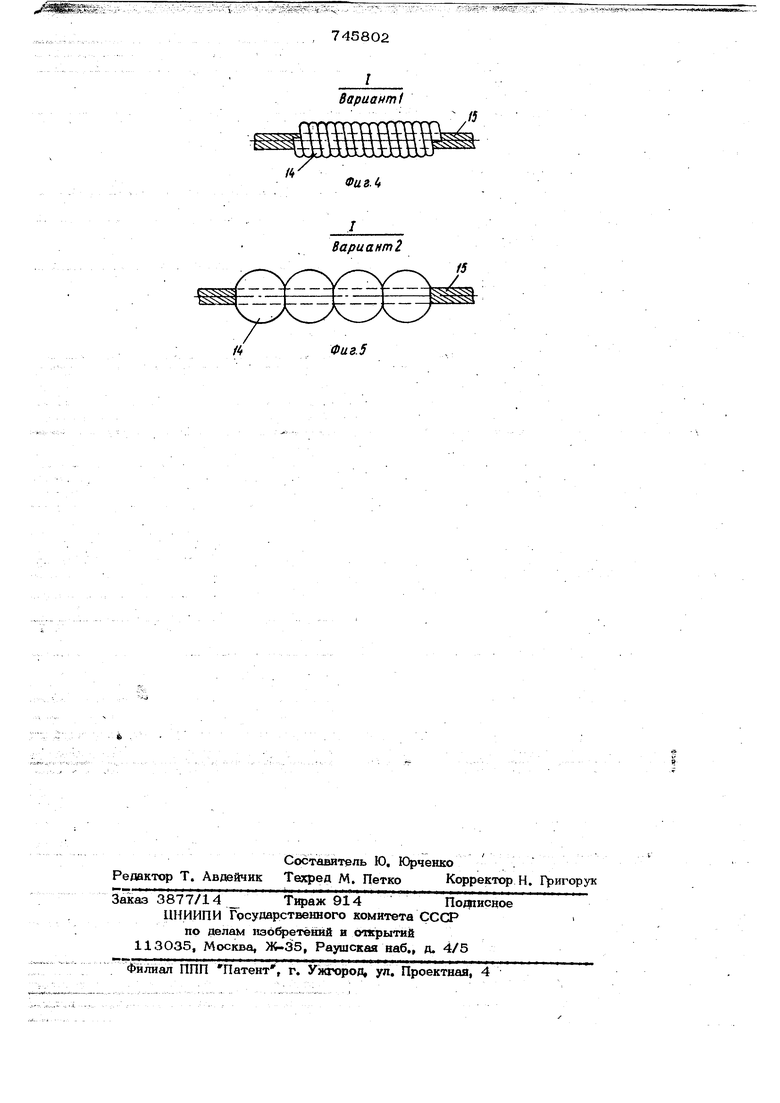
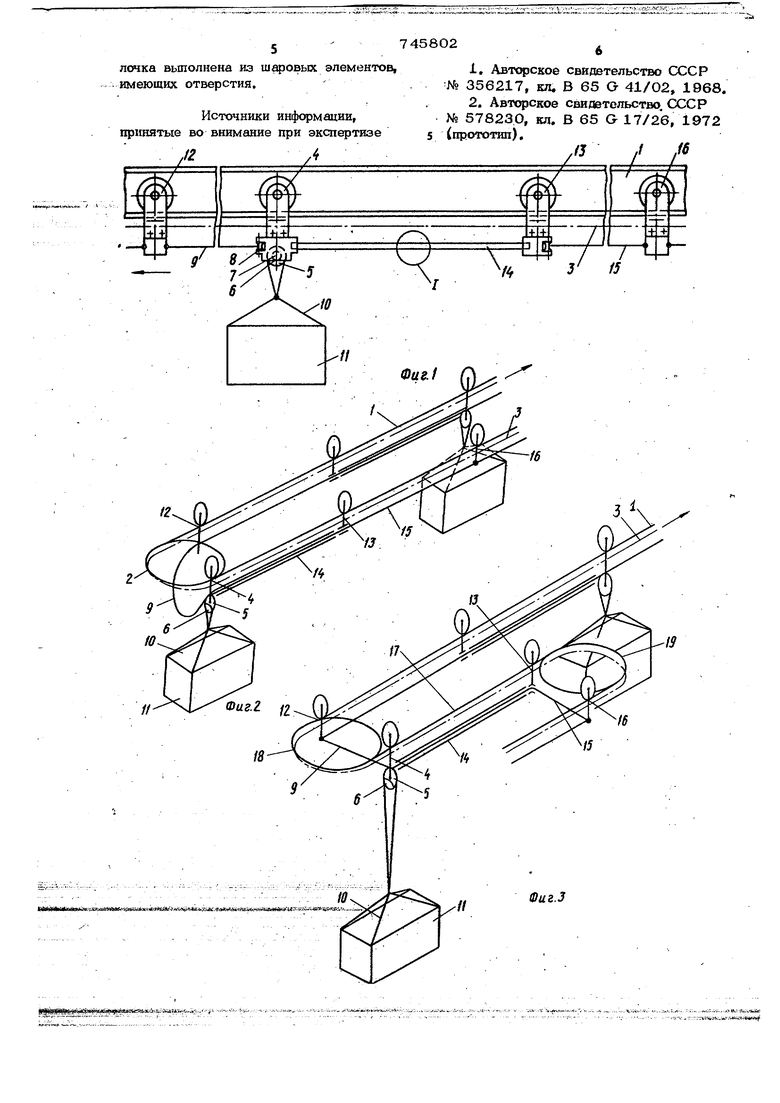
Изобретение относится к машинам Hfe-прерывного транспорта, а имеино к поревесным конвейерам. Известен подвесной конвейер, включающий ходовой путь с горизонтальными поворотами, на котором установлены ки с телеск жическими подвесками, оснащенные фиксаторами и роликами, взаимодействующими с ксжирами, устаноаленнь(ми в местах проведения технологических операций Cl3. Недостатком известного конвейера яэляется большая металлоемкость. Наиболее близким по технической cyutности является подвесной конвейер,вклк чающий ходовой путь с горизонтальными поворотами, на котсфом установлены холостые и грузовые каретки с подвесками юоединенные между собой гибкой тягой Недостатком известного конвейера является то, что он сложен- конструктивно и имеет большую металлоемкость. . Цель изобретения - упрощение конс-ррукции и снижение металлоемкости ко№.вейера. Поставленная цель достигается тем, что каждая грузовая каретка соединена с последующей цр ходу движения холостой клеткой посредством гибкой оболочки, которую пропущена гибкая тяга, а хо довой путь имеет S -образную форму для проведения технологических операций с прямолинейным участком между поворотами, равными длине гибкой оболочки, при этом длина дуги одного поворота равна расстоянию между грузовой и холостой каретками, фуГого - расстоянию между холостьали каретками. Кроме того,гибкая оболочка вьщолн©на в виде проволочной спирали или шаровых элементов, имеющих отверстие. На фиг. 1 - учасягок подвесного конвейера, общий вид; на фиг. 2 - схема участка подвесного конвейера с горизонтальным поворотом ходового пути; на фиг. 3 - то же, в месте горизонтального 374 -образного изгиба ходового njrrH; на фиг. 4 - узел 1 фиг. 1 (вариант 1)} на фиг. 5 - то же, вариант 2. .Подвесной конвейер включает ходовой путь 1 с горюонтальными поворотами 2, тяговый орган 3, грузовые и холостые каретки 4, снабженные спаренными блокан ми 5 и 6 установленными на горизонтальной оси 7, направляющими блоками 8 и гибкую тягу 9, Сезанную одним с подвеской 1Q для груза 11, а другим, огибая блок 5 соединена с холостой карет кой 12.. Каретка 4 соединена с последующей соседней с ней холостой кареткой 13 гибкой оболочкой 14, через которую пропущена гибкая тяга 15, связывающая грузовую подвеску 10с кареткой 16, Гибкая тяга 15 огибает блок 6 . на каретке 4, Раостояние между каретками 4 и 13 прижи мается равным или болыиим длине дуги го ризонтального поворота 2 подвесного ко вейера. В местах проведения технологических (Итераций ходовой путь 1 для изменения с динаты положения груза 11 имеет горизонтальный S -о азный изгиб с прямолинейным участком 17 между его поворотами 18 и 19. Длина прямолинейного участка 17 равна длине гибкой оболочки. Длина дуги поворота 18 равна расстоянию между каретками 4 н i2, а поворота 19 расстоянию между каретками 13 и 16. . Гибкая оболочка 14 может быть вь полнена в виде свитой вокруг гибкой тяги 15 проволочной спирали или образована из отдельных элементов с отверстием, на пример, шарообразной формы При сближ нии оболочка 14 сохраняет длину помещен ной в ней гибкой тяги 15, . Конец работает следующим образом. При передвижении тяговым 3 кареток 12, 4, 13 н 16 по прямолине{ ным участкам ходового пути 1 расстояние между каретками сохраняется и длина горизонтальных участков гибких тяг 9 и 15 не изменяется, ввиду этого остйётся неизменной ордината положения груза.-. 11, закрепленного к подвеске 10. При заходе каретки 1J2 на горизонталь ный поворот 2 ходового пути 1 груз удер живается в верхнем положении гибкой тягой 15, т.к. длина горизонтального участ ка этой тяги остается неизменной ввйДу нахождения кареток 4, 13, и 16 на прямо линейном участке ходового пути. При заходе каретки 4 на горизонтальный поворот 2 ходового путн 1 груз так-г 2 же удерживается в верхнем положении гибкой тягой 15, т.к. длина горизонтального участка этой тяги остается неизменной ввиду нахождения ее в гибкой оболочке между каретками 4 и 13 и расположения кареток 13 и 16 на прямолинейном участке ходового пути. При заходе каретки 13 на горизонтальный поворот 2 ходового пути 1 груз 11 удерживается в верхнем положении тягой 9, т.к. каретки 12 п 4 находятся на прямолинейном участке ходового пути 1. В месте определенном технологией при заходе каретки 12 на поворот 16, а к ретки 13 на поворот 19 5 -образного изгиба ходового пути 1 расстояние по прямой между каретками 12, 4 и 13, 16 уменьшается. В результате этого уменьшается длина горизонтальных участков ги& ких тяг 9 и 15, что, обеспечивает опускание груза 11, Максимальное опускание груза 11 достигается при положении кареток 12 и 13 на вьЬсоде из 18 и 19, а 4 и 16 - на Екодв в повс оты 18 и 19, Подъем- груза 11 в исходное транспорт ное положение достигается в результате выкатывания кареток 12, 4н13, 16 на прямолинейные участки ходового . Ф О р м ула изобретения 1.Подвесной конвейер, включающий ходовой путь с горизонтальными. поворотагми, на KvrapOM установлены холостые и грузовые каретки с подвесками, соединенные гибкой тягой и, тяговый qjraH с приводом, о т л и ч а ю щ и и с я тем, что, с целью упрощения конструкции и снижения металлоемкости, каждая грузовая каретка соединена с последукяцей по ходу движения .холостой кареткойпосредством гибкой оболочки, через которую пропущена гибкая т&га, а ходовой путь имеет 5 -образную форму для проведения технологических операций с прямолинейным участком между повсфотамн, равным длине гибкой оболочки, при этом длина дуги одного поворота равна расстоянию между грузовой и холоотой каретками, j|pyroro - расстоянию холостыми каретками. 2.Подвесвой конвейер, по п. 1, о т л. нчающийся тем, что гибкая .юёопочка выполнена в виде проволочной спирали. 3.Подвесной конвейер по п. 1, отличающийся тем, что гибкая оболочка выполнена из шаровых элементов, имеющих отверстия.
Источники информации, принятые во внимание при экспертизе
;2ft-iiJudB fl№; M A t j iat r- yii
(S a i6Je«fc9 «jK 1, свидетельство СССР № 356217, кл. В 65 G 41/02, 1968.
(прототип).
, -.--;-.....--.г-,iv,..,e.j-s.-.t i-Sci
ч- r--r--si K.
