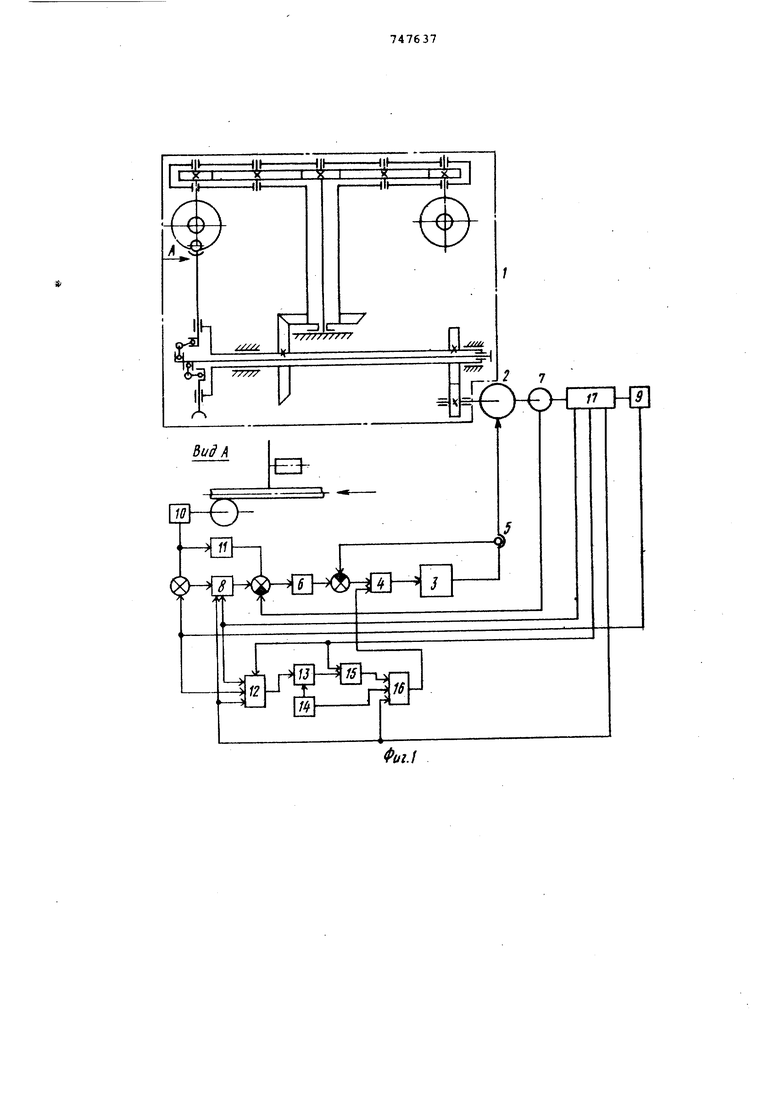
Изобретение относится к области машиностроения, в частности к конструкции оборудования для резки металлов . Известна система управления ,эвект роприводом вращающихся летучих пил, содержащая двигатель с питающим его преобразователем, к входу которого подключены последовательно соединенные регулятор тока двигателя, регулятор скорости пилы и цифроаналоговый регулятор положения с датчиками перемещения пилы и изделия Ц, С целью улучшения качества реза путем устранения .косины торца при резе, а также повышения стойкости ре жущего инструмента, система управле ния снабжена устройством коррекции скорости в зоне реэа, выполненным в виде датчика положения летучей пилы реверсивного счетчика, схемы совпадения, преобразователя код-иапряжение, а также блоком управления знак сигнала и формирования момента переключения сигнала управления, при этом управляющие входы реверсивного счетчика соединены с выходами датчи ка положения, информационный вход этого счетчика соединен с выходом датчика перемещений, выход блока . формирования момента переключения сигнала управления- соединен с вхоом схекы совпадения, управляющий вход которой соединен с выходом реверсивного счетчика, входы блока управления знаком сигнала соединены один с выходом схемы совпадения, ЯРУ гой - с выходом датчика положения, а выход этого блока соединен с входом преобразователя код-напряжение, другой вход которого подсоединен к выходу блока формирования момента переключения сигнала управления, при этом выход преобразователя код-напряженке с входом регулятора тока, выходы датчика положения пилы соединены сблокирующими входами преобразователя код-напряжение и цифрой аналогового регулятора положения. На фиг. 1 представлена блок-схема систекы управления; на фиг. 2 - график изменения сигнала управления для получения закона изменения скорости, близкого к оптимальному. Летучая пила 1 приводится во вращение двигателем 2, питание которого осуществляется от регулируемого преобразователя 3. Схема управления преобразователем включает в себя регулятор тока 4 с датчиком тока 5, регулятор скорости 6 с датчиком ркорости 7, цифроаналоговый регулятор положения 8 с датчиком перемещения пилы 9 и датчиком перемещения трубы 10. На вход регулятора скорости 6 сигнал от датчика перемегцения трубы 10 по- дается через преобразователь частотанапряжение 11.
Схема управления преобразователем содержит устройство коррекции скорости пилы в зоне реэа, выполненное в виде реверсивного счетчика 12, схекы совпадений 13, блока формирования момента переключения сигнала управления 14, блока управления знаком 15 и преобразователя код-напряжение 16.
Включение блокировки устройства коррекции скорости осуществляется с помощью датчика положения летучеИ пилы Ц,
Устройство коррекции работает следующим образом.
Для получения качественного торца разрезаемого изделий обеспечивается условие совпадения горизонтальной составляющей окружной скорости режущего инструмента в переносном движении (Vf-op ) во всех точках зоны реза и скорости движения разрезаемого изделия (Vrop ) ) . Из этого условия (Vrgp Vn55 ) следует, что окружная скорость режущего инструмента в переносном движении в зоне реза. должна изменяться по закону: V S.iL
С.ОВ-Р
Отсюда следует, что угловая скорость движения режущего инструмента должна в свою очередь изменяться по закону:
где R - радиус траектории движения
режущего инструмента, Ч(д, скорость движения разрезаемого изделия,
Р - текущее значение угла поворота режущего инструмента в зоне реза.
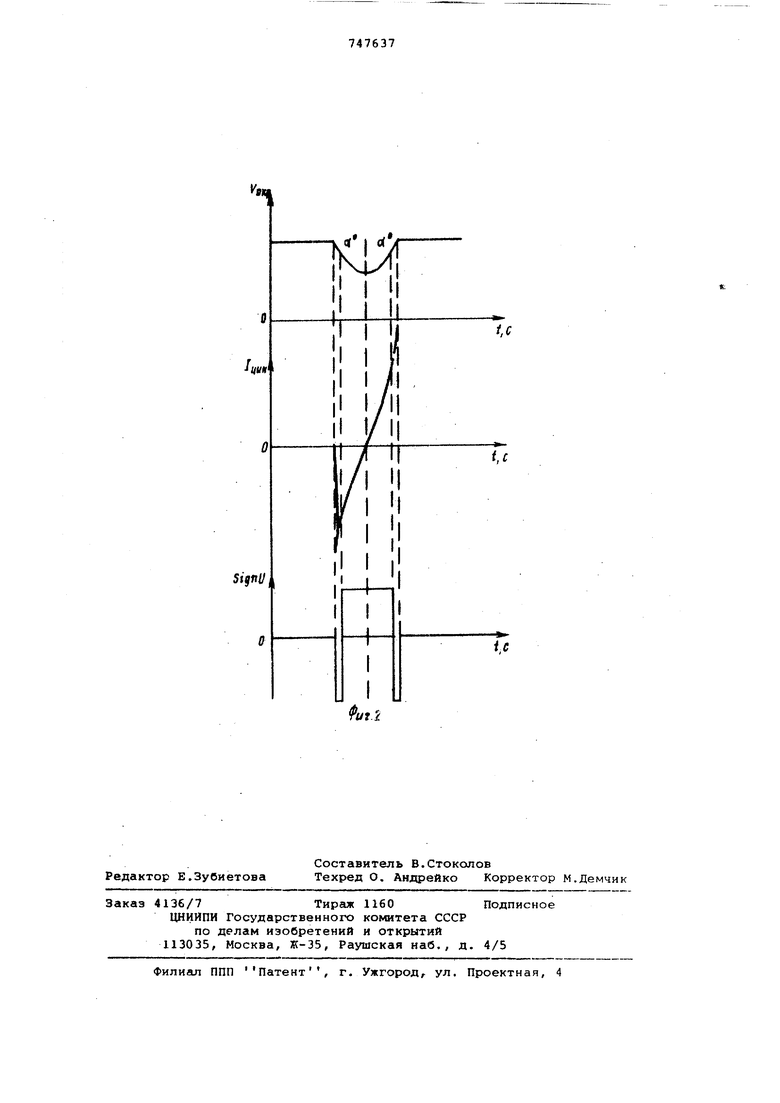
Для реализации этого закона цз-менения скорости летучей пилы в зоне реза сигнал управления на выходе системы электропривода должны формироваться в соответствии с графиком на фиг. 2.
Для получения сигнала управления в соответствии с этим графиком по команде датчика положения 17 блокируется выход цифроаналогового регулятора положения 8 и ко входу регулятора 4 присоединяется узел коррекции скороети, содержащий счетчик реверсивный 12, схему совпадений 13, блок формирования момента переключения сигнала 14, блок управления знака 15, преобразователь код-напряжение 16.
При блокировке выхода цифроаналогового регулятора положения 8 в нем формируется и сохраняется текущая информация о рассогласовании по пути изделия и режущего инструмента. По
окончании процесса г13йелия датчик 17 положения летучей пилы снимает блокирование выхода цифроаналогового регулятора положения 8 и блокирует выход узла коррекции скорости.
Накопление в цифроаналоговом регуляторе 8 информации о рассогласовании по пут., изделия и по пути режущего инсгрумбита вводится в регулятор скорости 6 и отрабатывается до начала следующего реза, чем обеспечивается раскрой изделия на заданные длины.
Использование систеьоы управления электроприводом позволяет повысить эффективность работы летучих пил за счет улучшения качества реза и повыщения стойкости режущего инструмента.
Формула изобретения
Система управления электроприводом вращающихся летучих пил, содержащая двигатель с питающим его преобразователем, к входу которого подключены последовательно соединенные регуляторы тока двигателя, регулятор скорости пилы и цифроаналоговый регулятор положения с датчиками перемещения пилы и изделия, отличающаяся тем, .что, с целью улучшения качества разрезанного изделия и повышения стойкости инструмента, она снабжена устройством коррекции скорости в зоне реза, выполненным в виде датчика положения летучей пилы, рев.ерсивного счётчика, cxeNEd совпадения, преобразователя код-напряжение, а также блоков управления знаком, сигнала и формирования момента переключения сигнала управления, при этом управляющие входы реверсивного счетчика соединены с выходами датчика положения, информационный вход этого счетчика соединен с выходом датчика, перемещений, выход блока формирования момента переключения сигнала управления соединен с входом схемы совпадения, управляющий вход которой соединен с выходом реверсивного счетчика, входы блока управления знаком сигнала соединены один с выходом схе.мы совпадения, другой - с вкходом датчика положения, а выход этого блока соединен с входом преобразователя код-напряжение, другой вход которого подсоединен к выход блока формирования момента переключения сигнала управления, при зтом выход преобразователя код-напряжение соединен с входом регулятора тока, а выходы датчика положения пилы соединены с блокирующими входами преобразователя код-напряжение и цифроаналогового регулятора положения. Источники информации, принятые во внимание при экспертизе
1. Кулесский Р.А. и Шубенке В.Д. Электроприводы постоянного TOica с цифровым программным управлением, Энергия, 1973, с. 14-22.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления летучей пилой | 1979 |
|
SU998017A1 |
| Устройство для управления летучей пилой | 1985 |
|
SU1252079A1 |
| Устройство управления летучей пилой | 1982 |
|
SU1072991A1 |
| Устройство для управления электроприводом летучих отрезных механизмов прокатных станов | 1975 |
|
SU531577A1 |
| Устройство управления летучей пилой | 1983 |
|
SU1109270A1 |
| Устройство автоматического раскроя заготовки на летучем отрезном станке | 1982 |
|
SU1092015A1 |
| Устройство для управления летучими ножницами сортопрокатных и трубных станов | 1976 |
|
SU656754A1 |
| Устройство для управления летучими ножницами сортопрокатных и трубных станов | 1974 |
|
SU546439A1 |
| Система управления приводом летучих ножниц | 1978 |
|
SU874279A1 |
| Летучая пила для резки профилей на мерные длины | 1970 |
|
SU376998A1 |