Изобретение относится к машигюстроению, в частности к манипуляторам для автоматизации всиомо1 ательных те.хно.логических процессов. Известен четьфехрукий ма:-ш11улятор промышленного робота, Е котором Е)ыдвижение рук осуществляется индивидуальными порн:невыми двигателями, установленными в иоворотном корпусе, перпендикулярно его оси поворота 1. Недостатком указанного манину;1ятора являются ухудшенные динамические характеристики поворотной части из-за наличия четырех индивидуальных двигателей и установки их в поворотном корпусе перпендикулярно его оси поворота. Наиболее близким к предлагаемому я.нляется манипулятор, содержаний новоротный вертикально перементакмцийся относительно основания корпус, связанные с ним горизонтально выдвигающиеся с помощью зубчать х реек руки со схватами, поршневые двигатели поворота и вертикального riepeмещения корпуса, а также упоры для регулирования хода рук 2J. Недостатком указанного .манипулятора являются также ухудшенные динамические характеристики, так как оси йорщневых двигателей расположены перпендикулярно оси поворота корпуса. Целью изобретения является у гучпС;,ие динамических характеристик манипулятора. Указанная цель достигается тем, чтс многорукий .манипулятор, содержащий новоротный, вертикально неремешающийся о носительно основания корпус, связанные с ним горизонтально выдвигающиеся с помощью зубчатых реек руки со схватами, jopHiiieBbii;; двигатели поворота к вер1икальнч)го пе)емещения корпуса, а также vnopbi регулирования хода рук, снабжен .:;убчй г)1ми блоками и соосным с ,- дополни re.ii.ным норн1невым двигателе.п .ля в;,ДВ.ь:е:ния рук, на Н1токе ;1с;рн1ня к()тс. в р зных плоскостях выполнены зубчатые рейки причем одно колесо каждого зубчатого блока находится в зацепления с одной зубчатой рейкой штока :;;ог10ЛН1;тс/:ь.ног() поршневого двигателя, а дрхчое - с зхбча-тыми рейками рук. На чертеже схематически изображен предлагаемы и .1 ногоруки и .м а гнщ ул ято1). В непод,в.ижном основании 1 установлен. корпус 2, который имеет возможность поворота вокруг вертикальной оси и вертикаль-. ного перементения. На валу 3, жестко сое.ти не ни а я с корпусом 2, имеется скользящее зубчатое кольцо 4, которое входит в :-.ацепле;1ие с зубчатой рейкой 5 поршневого привода двигателя 6 механизма поворота. Вал 3 О щрается на подпятник штока поршня двигателя 7 подъема. В корпусе 2 смонтирован поршневой двигатель 8 механизма выдвижения рук, i-a штоке 9 которого в смежных плоскостях имеются зубчатые рейки 1(J, 11. Ось поршневого .двигателя 8 выдвижения рук совмешена с осью поворота корпуса 2, т. е. с осью вала 3. В ианравляюпшх корпуса 2 установлены ;5Уки 12-14 манипулятора, на которых вы;:o.;iiier-bi зубчатые рейки. На передней части рук к)-:.нятся схваты 15. Блок-шестерня 16 ОЛ.НИМ своим зубчйтьп« колесом входит в заце1 лсние с зубчатой рейкой 10, а други.м с зубчатыми оейками рук 12 и 13. Блок-щес герня 17 одни.м своим зубчатым колесом взаимодействует с зубчатой рейкой И, а .другим - - с зубчатой рейкой руки i4. На Kcjpnyce 2 и.меется рс;улируемый упор :8, который О1раничивает ны-лет рук. Упоры 19 служат для устранения зазорои ii .зубчатых соединениях в конде хода Мьогорукий .манииу.лятор работает слсЧУН)Н1им образом. Вертикг.лы1ое перемеще 1 е всех рук осу пкств;яется Г1орип1езьгм двигате./;ем 7. )T корнуса 2 н снязап1-;ь Х с ним рУК 12 - 14 осу:цсс|в, Я01ся норщнев)1м дви1ателем 6 чеэез зубчатУЮ рейку 5 и зубчатое KOJieco 4. f ььи ижение нсех рук манинулятгфа производится од;1О 1ремеино одним норни евым ..;вигаге;1е 1 Д. При nejieMPiueiiini иггока 9 рейка 10 через б.чок-шестернк; 16 переменгает Пки 2 и 13 в ;азные стороны. Рейка 11 через блок-щестсрню 17 нерсмеJiUieT руку 14. .1ирова11ие 1К.;ичи 1ы вы/Юга мс ха1 И:сски: (ч;твл;и.птя с .юмол1ью зинуоиого yiiopa i8. лЧ-т;)аj;e;iHe люфid в зубчаты-ч ,1.ачах о;.-ущестк.:1яется винТОВ1)Г1;И УНОрНМИ 19. хла11) 11рг:-.1Смеии(; о;и)(лс; л ршнечо;-о д|;игат :1 : д..;Я зыдви/кения и установкл гг;; сооси;) с оськ 11(.)вороть корнуса 2 зка пптльпь .лхчм/сК) си динамические Xfi j};i 1) и с ги к;i м а и и i:хл ято эа.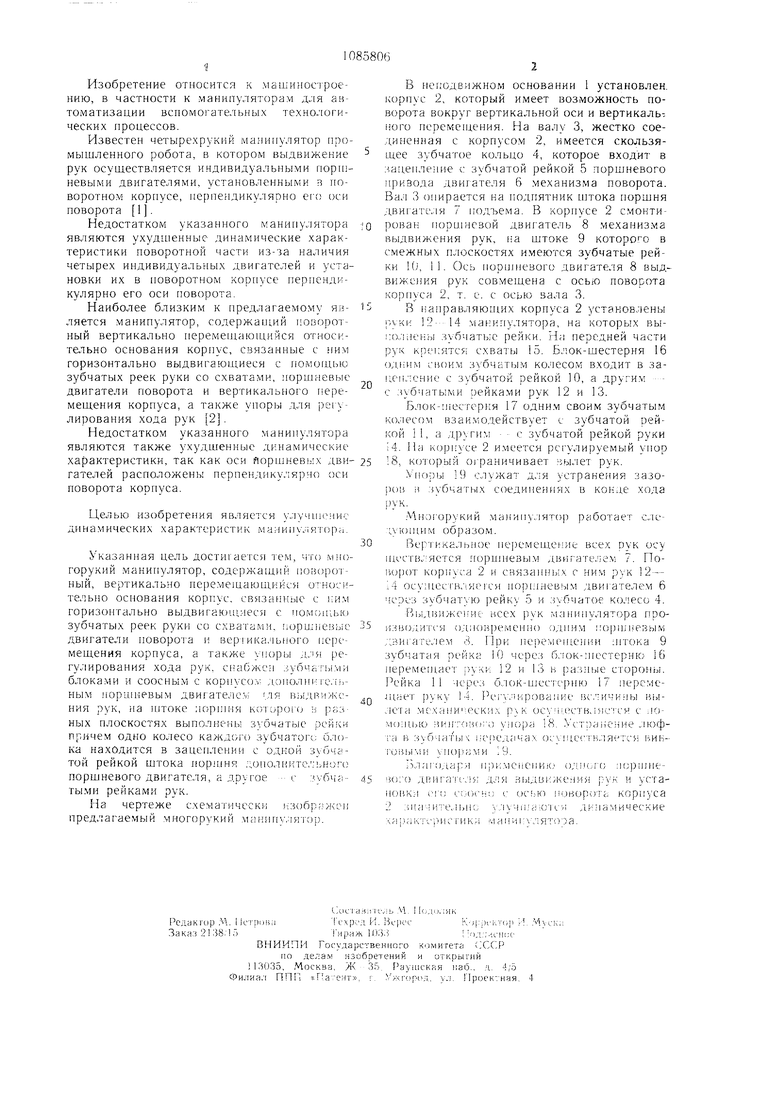
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU1166877A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Схват манипулятора | 1983 |
|
SU1093548A1 |
| Манипулятор | 1988 |
|
SU1593948A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Манипулятор | 1985 |
|
SU1308463A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Промышленный робот | 1986 |
|
SU1368166A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
МНОГОРУКИЙ МАНИПУЛЯТОР содержаший поворотный, вертикально перемеш,аюшийся относительно основания корпус, связанные с ним горизонтально выдвигаюш.иеся с помощью зубчатых реек руки со схватами, поршневые двигатели поворота и вертикального перемешения корпуса, а также упоры для регулирования хода рук, отличающийся тем, что, с целью улучшения динамических характеристик, он снабжен зубчатыми блоками и соосным с корпусом дополнительным поршневым двигателем для выдвижения рук, на штоке поршня которого в разных плоскостях выполнены зубчатые рейки, причем одно колесо каждого зубчатого блока находится в зацеплении с одной зубчатой рейкой штока поршня дополнительного поршневого двигателя, а другое - с -зубчатыми рейками рук. (Л 00 СП 00 о о:
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Юревич Е | |||
| И | |||
| Устройство промышленных роботов | |||
| М., «Машиностроение, 1980, с | |||
| Ротационный колун | 1919 |
|
SU227A1 |
| IV, 27 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Камышный Н | |||
| И | |||
| Автоматизация загрузки станков | |||
| /VI., «Машиностроение, 1977, с | |||
| Гудок | 1921 |
|
SU255A1 |
| Канальная печь-сушильня | 1920 |
|
SU230A1 |
