(54) ПОДЪЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Цепной подъемник для штучных изделий | 1981 |
|
SU1028573A1 |
| ШТАМП-АВТОМАТ | 2000 |
|
RU2193941C2 |
| Элеватор для транспортирования штучных грузов | 1980 |
|
SU905159A1 |
| Способ загрузки токарных полуавтоматов деталями для их двусторонней обработки и автоматическая линия для его осуществления | 1988 |
|
SU1662807A1 |
| Автоматическая линия для механической обработки деталей типа валов | 1990 |
|
SU1791099A1 |
| Устройство для сборки запрессовкой стержневых деталей с пластинами | 1986 |
|
SU1380893A1 |
| ШТАМП-АВТОМАТ | 2003 |
|
RU2261153C2 |
| Станок для накатывания кольцевых канавок | 1983 |
|
SU1224074A1 |
| Устройство для групповой обработки деталей | 1990 |
|
SU1815154A1 |
| Подвесной грузонесущий конвейер | 1990 |
|
SU1745635A1 |

Изобретение относится к области подъемно-транспортных устройств и может быть использовано, например, в области станкостроения для перемещения и подъема с адресованием различных деталей.
Наиболее близким техническим решением ;из известных является подъемник, содержащий за-мкнутый тяговый орган с закрепленными на нем грузонесущими элементами, подпружиненные отсекатели, лотки загрузки и выгрузки 1.
Недостатком указанного устройства является сравнительно невысокая надежность адресования при загрузке и выгрузке из нескольких лоткрБых систем.
Цель изобретения - повышение надежности работы при загрузке и выгрузке из нескольких лотковых систем, а также расширение функциональных возможностей путем обеспечения адресной подачи грузов.
Указанная цель достигается благодаря тому, что против лот;ков выгрузки установлены толкатели, грузонесущие элементы выполнены с копирными канавками, а толкатели и отсекатели снабжены роликами, взаимодействующими с канавками, причем канавки и взаимодействующие с ними ролики расположены группами, в параллельных плоскортях, смещенных одна относительно другой, а число этих групп выбрано равным числу площадок загрузки и выгрузки.
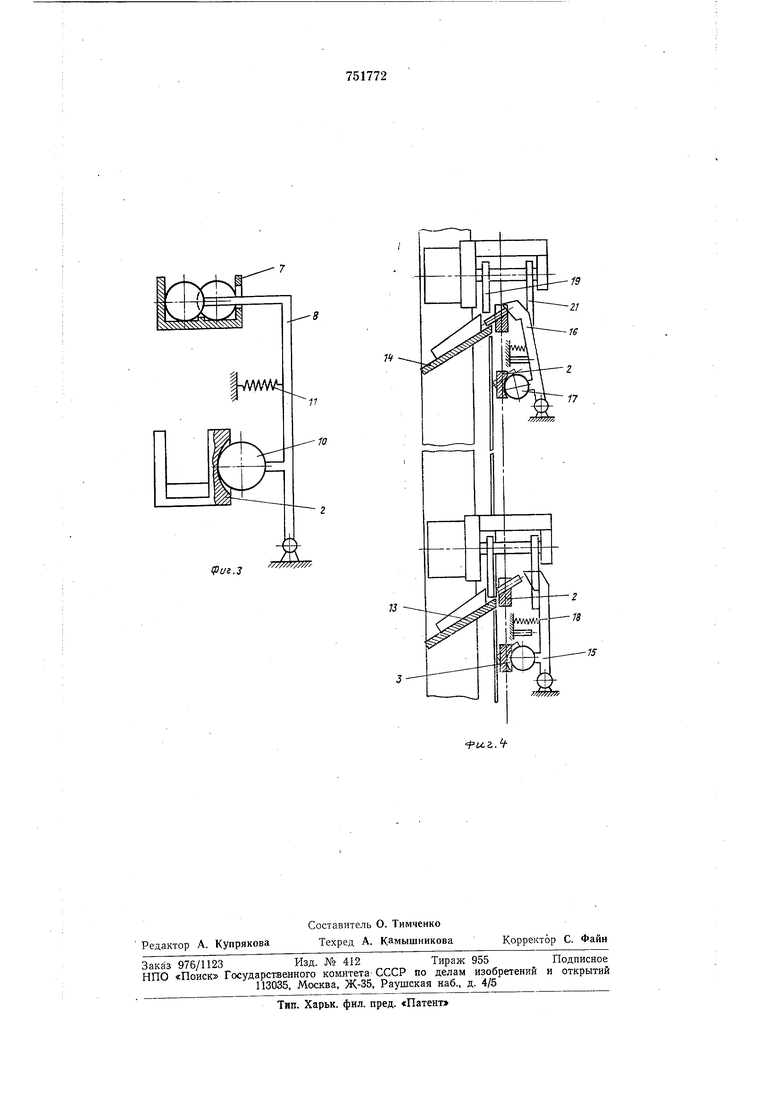
На фиг. 1 схематично изображен подъем ник, общий вид в разрезе.; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - подпружиненный отсекатель; на фиг. 4 - толкателн с лотками выгрузки.
Подъемник содержит бесконечно-замкнуio тую тяговую цепь 1 с закрепленными на ней грузонесущим.и элементами 2, имеющими коп.ирные канавки 3, расположенные в параллельных плоскостях в виде двух групп 4 и 5 (см. фиг. 2).
15 Группа 4 канавок 3 смещена относительно группы 5 канавок. Против лотков 5 и 7 загрузки установлены отсекатели 8 к 9 (см. фиг. 3|, имеющие ролики 10, взаимодействующие с канавками 3, причем отсекатель
20 8 взаимодействует с группой 4 канавок, а стсекатель 9 - с группой 5 канавок. Пружинами // ролики 10 поджимаются к канавкам 3. В лотках загрузки имеются упоры 12.
25 Против лотков 13 и 14 выгрузки установлены толкатели 15 и 16 (см. фиг. 4), имеющие ролики,/7, которые пружинами 18 поджимаются к канавкам 3.
Подъемник работает следующим обра30 зом.
Детали поступают в лотки 6 и 7 загрузки и задерживаются упором 12 (см. фиг. 2). При движении цепи / с элемента ми 2 ролики 10 отсекателей 8 и 9 западают в канавки 3, ,и отсекатели 5 и Р западают в канавки 3, снимают детали с упора 12 и переталкивают их в элементы 2. При этом отсекатель 9 загружает детали в элементы 2 с группой 4 канавок 3, а отсекатель 8 - с групиой 5 копирных канавок.
При выгрузке деталей ролики 17 толкателей 15 и 16 заиадают в канавки 5, и толкатели перемещают детали в лотки 13 и 14 выгрузки, при этом толкатель 15 взаимодействует с группой 4 копирных канавок и выгружает детали в лоток 13, а толкатель 16 взаимодействует с группой 5 кооирных канавок и выгружает детали в лоток 14.
Если каждый элемент 2 перемещает несколько деталей, то на нем может быть несколько копирных канавок и этот элемент будет загружаться из разных лотков загрузки.
Если при выгрузке деталей требуется больщее или меньшее число адресов, чем при загрузке, на элементах 2 выполняются группы копнрных канавок, отличные от груплы канавок загрузки.
Пр.и выполнении в элементах 2 наклонного дна при выгрузке устанавливают заслонки 19, препятствующие произвольному, соскальзыванию деталей в лотки выгрузки (см. фиг. 4), при загрузке - стенку 20 (см. фиг. 2).
Для регулирования работы толкателей выгрузки ;можно использовать блокирующие устройства, при этом заслонка 19 и
рычаг 21 блокировки располагаются на одной оси.
Наличие копирных канавок на несущих элементах и роликов, взаимодействующих с 5 копирными канавками, обеспечивает надежную адресную загрузку и выгрузку от нескольких лотковых систем, при этом не требуются различные стрелочные устройства.
Формула изобретения
Подъемник, содержащий замкнутый тяговый орган с закрепленными на нем грузонесушими элементами, подпружиненные
отсекатели, лотки загрузки и выгрузки, отличающийся тем, что, с целью повышения надежности работы при загрузке и выгрузке из нескольких лотковых систем, а также расширения функциональных возможностей путем обеспечения адресной подачи грузов, против лотков выгрузки установлены толкатели, грузонесущие элементы выпрлмены с копириыми канавками, а толкатели и отсекатели снабжены роликами,
взаимодействующими с канавками, причем канавки и взаимодействующие с ними ролики расположены группами в параллельиых плоскостях, смещенных одна относительно другой, а число этих групп выбрано
равным числу площадок загрузки и выгрузки.
Источник информации, принятый во внимание при экспертизе:
/ т
Фиг.1
