Изобретение отностся к станкостроению и предназначено для использования в токарны автоматах для управления переключениями скоростей вращения шпинделя, торможения шпинделя, включением привода дополнительны устройств и другимн электрическими переклю чениями. Известны системы управления электрически ми переключениями в токарном автомате, сод жаидие пульт преднабора программы с переключателями, командо аппарат роторного типа с замыкателями считывания программы, расположенными по окружности, с фиксатором, управляемым посредством рычага от ригелей распределительного вала автомата, и элементов связи их с автоматом 1. Недостатками систем утфавления являю.тся трудность эксплуатации системы в связи со сложностью преднабора и переналадки програм мы, а также ненадежность, вследствие наличия электрических контактных замыкателей, срабатывающих в процессе работы автомата по циклу. Целью изобретения является улучшение условий эксплуатации системы, повышение быстродействия и надежности. Поставленная цель достигается тем, что командоаппарат снабжен лопастными дисками, размещенными в камерах, связанных воздухопроводом и рычагом, на котором расположен фиксатор и регулируемый ригель, а один из дисков установлен на роторе командоаппарата, второй - на валу электродвигателя. На фиг. 1 изображена схема системы управления электрическими переключениями в то- карном автомате; на фиг. 2 - пульт преднабора программ работы автомата; на фиг. 3 командоаппарат, продольный разрез; на фиг. 4 разрез на фиг. 3; на фга-. 5 - разрез Б-Б на фиг. 3. Система управления электрическими переключениями в токарном автомате (фиг. 1) состоит из пульта 1 к командоаппарата 2. Электрические схемы командоаппарата 2 и пульта 1 связаны с электрической схемой автомата электропроводами 3 и 4.
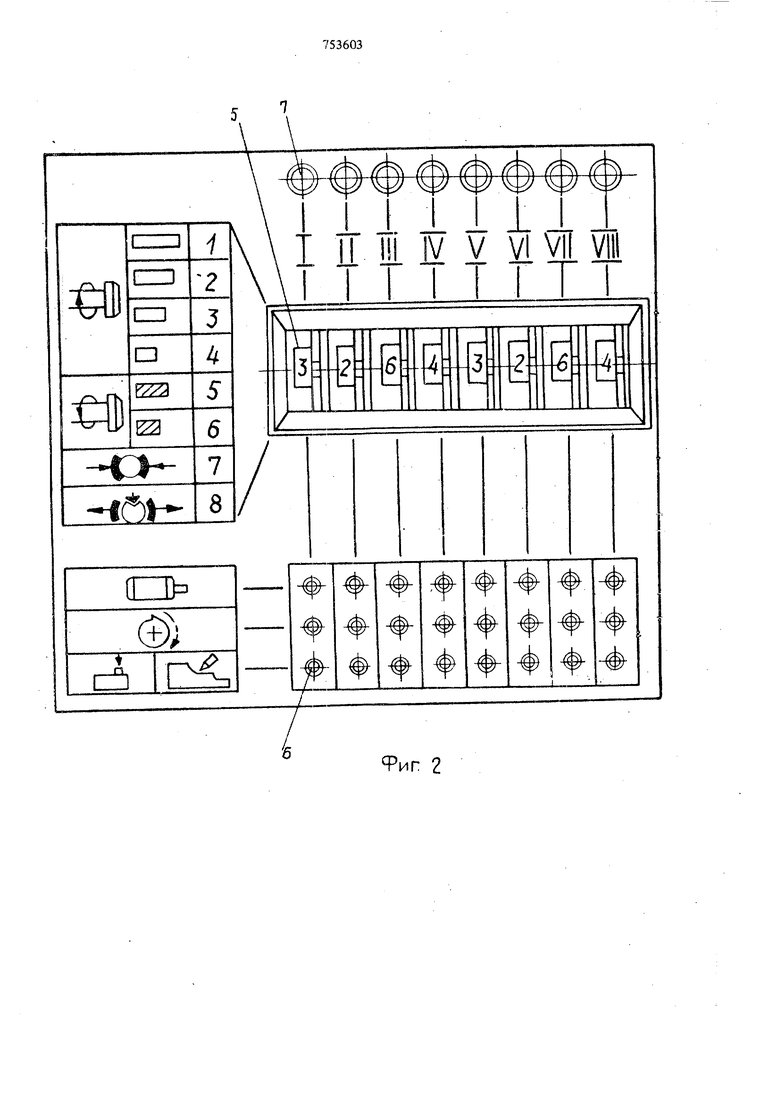
Пульт прецнабора программь работы авомата (фкг. 2) состоит из декадных переклюателей 5; штеккерных замыкателей 6 1шдикаорных лампочек 7 для указания считываемого тапа.5
На декаД5-1Ь Х переключателях 5 задействоаны восемь позиций, обозначенных арабскими ифрами, которым соответствуют четыре левых корости шпинделя (вдфры 1, 2, 3 и 4), две равь1х скорости шпинделя (цифры 5 и 6),10
торможение шпинделя (цифра 7), освобожде;иие шпинделя с включением устройства для делительного поворота шпинделя (цифра 8).
На трех горизонтальных строках штеккерных заглйкателей 6 устанавливаются включение15
злектродвигателя привода дополнительных устройств (1-я строка), включение ускоренного вращения распредвалов (2-я строка), включение устройства для автоматической загрузки прутков шга гидрокогжровального устройства (3-я стро- 20 ка).
Включение шэдикаторной лампочки 7 сввдетельствует о прохождении данного этапа программы. На пульте этапы обозначены цифрами 1, ...,Vin.25
В зависимости от требуемой по циклу последовательности включения скоростей шпинделя и направления его вращения, торможения и освобождения шшшделя декадные переключатели 5 в каждом этапе I, ...VIII ставятся в 30 нужные позиции, согласно таблице, изображенной на самом пульте .
Подобным же образом, в зависимости от требуемой по циклу последовательности включения электродвигателя привода дополнительных 35 устройств ускоренного вращения распредвалов, устройства для автоматической загрузки прутков или гидрокопировального устройства, штекKcpHbie замыкатели 6 в каждом этапе ,...VI1I, , ставятся в нуяшые гнезда, согласно таблице. 40
Командогшпарат (фиг. 3,4 и 5) состоит из корпуса 8, в котором установлены равномерно по окружности восемь бесконтактных замыкателей 9. В подшипниках 10 корпуса 8 установлен ротор 11, который несет 12, лопастной диск 13 с цифрами t, ... Vill на отгибах его Лопастей, фиксационный диск 14 с пазами 15 и выступами 16.
В корпусе 8 предусмотрен лопасной цкск 11, .,, установленный на валу электродвигателя 18. Камера 19 лопастного диска 17, связана с наружной ai-мосферой отверстием 20, а с кам:ерой 21 лопастного диска 13 - воздухопроводом 22 в корпусе 8. Камера 21, в свою очередь, связана с наружной атмосферой каналом 23- Фиксаниоштый диск 14 удерживается от проворота за паз 15 фиксатором 24. установ- . ленным на нижнем плече рычага 25, н;исодящегося под воздействием пружины 26. На верхнем плече рычага 25 предусмотрен ригель 27, на который воздействуют ригели 28 распредвала. Для удобства установки глубины зацепления ригелей 27 и 28 предусмотрено регулировочное перемешение всего командоаппарата в горизонтальной гшоскости по шпонке 29.
В корпусе 8 предусмотрено окно 30, закрытое стеклом 31.
Система управления электрическими переключениями в токарном автомате работает следуюшим образом.
При включении автомата, одновременно с электродвигателем главного привода включается также электродвигатель 18 привода лопастного диска 17. Поток воздуха, засась1ваемого через отверстие 20 в камеру 19, подается через вохдухопровод 22 в камеру 21, попадает на лопастной 13, обтекает его и выбрасывается в открытую атмосферу через канал 23.
Повороту потоком воздуха лопастного диска 13, а вместе с ним и ротора 11 с флажком 12, препятствует фиксатор 24, введенный в паз 15 фиксационного диска 14. Положение флажка 12, введенного в прорезь одного из бесконтактных замыкателей 9, можно установить по римским цифрам, нанесенным на отгибах лопастей лопастного диска 13. Эти цифры можно наблюдать через окно 30, закрытое стеклом 31.
Таким образом, ротор 11 командоаппарата 2 с флажком 12 находятся в зафиксированном положении, например на этапе 1У. Соответствуюшдй бесконтактный замыкатель 9 через электропровода 3 и 4 передает команду в логическую электросхему автомата на считывание установки декадного переключателя 5 и наличия штеккерных замыкателей 6 на пульте 1 для этапа ГУ. При этом производятся включения механизмов автомата, в соответствии с установкой декадного переключателя 5 и с наличием штеккерных: замыкателей 6 для этапа 1У и загорается соответствующая индикаторная лампочка 7.
При набегании ригеля 28 распредвала на ригель 27 рычага 25 командоаппарата происходит выведение фиксатора 24 из паза 15 фиксационного диска 14. Под действием потока воздуха на лопастной диск 13 ротор 11с фиксационным диском 14 и флажком 12 наiMiiaeT поворачиваться на подшипниках 10 корпуса 8. Выступы 16 на фиксационном диске 14 дополнительно отводят рычаг 25 и обеспечивают четкое разобщение ригелей 27 и 28.
Затем фиксатор 24 под действием пружины 26 рычага 25 западает в следующий паз 15 фиксационного диска 14. 12 оказывается в прорези следующего бесконтактного 5 замыкателя 9 по ходу вращения ротора 11. Флажок 12 останавливается на этапе до новой команды на переключение. При последовательном прохождении флажка 12 в прорезях бесконтактных замыкателей 9 осуществляется считывание программы работы автомата, установленной на пульте 1. Для осуществления поворота флажка 12 вручную при наладочной установке его положения, конец ротора И в шедется за пределы корпуса 8. Установка глубины зацепления ригелей 27 и 28 осуществляется регулировочным перемещением всего командоаппарата в горизонталь.ной плоскости по щпонке 29. Формула изобретения Система управления электрическими перекл чениями в токарном автомате, содержащая пульт преднабора программы с переключателями, командоаппарат роторного типа с замыкателями считывания программы, расположенными по окружности, с фиксатором, управляемым посредством рычага от ригелей распределительного вала автомата, и элементов связи их с автоматом, отличающаяся тем, что, с целью улучшения условий эксплуатации системы, повьпнения быстродействия, командоаппарат снабжен лопастными дисками, размещенными в камерах, связанных воздухопроводом и рычагом, на котором расположен фиксатор и регулируемый ригель, а один из дисков установлен на роторе командоаппарата, второй - на валу электродвигателя. Источники информации, принятые во внимание при экспертизе 1. Токарный автомат мод.. 15140, Хабаровский станкостроительный завод.


| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления переключениями в станках с автоматизированным рабочим циклом | 1986 |
|
SU1433764A1 |
| Устройство для управления положением рабочих органов | 1984 |
|
SU1209434A1 |
| Устройство для контроля работы прессового оборудования | 1984 |
|
SU1243005A1 |
| Намоточная головка | 1984 |
|
SU1277229A1 |
| Токарный автомат | 1986 |
|
SU1355360A1 |
| Поточная линия контроля качества дисков неразрушающим методом | 1983 |
|
SU1173305A1 |
| Устройство поворота многошпиндельного барабана токарного автомата | 1979 |
|
SU856661A1 |
| Устройство для наплавки | 1972 |
|
SU473578A1 |
| Токарно-револьверный автомат | 1974 |
|
SU663487A1 |
| Шпиндельная бабка токарного автомата | 1983 |
|
SU1096040A1 |


CD
си
т
Ш
Фиг.
-/
EZD
CD
О
P%
-i(v
QIJ
:4
./
Фиг 2
а 1
-17
Фиг. 3
