(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ УПРУГОГО МАТЕРИАЛА ПРИ ЕЕ ТРАНСПОРТИРОВКЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения полосы в башенной печи | 1983 |
|
SU1104176A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Следящий электропривод с переменным моментом инерции | 1983 |
|
SU1141375A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU984530A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1991 |
|
RU2007838C1 |
| Двухдвигательный электропривод постоянного тока | 1981 |
|
SU978307A1 |
| Электропривод с регулированием натяжения обрабатываемого упругого материала | 1986 |
|
SU1387155A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
1
Изобретение относится к устройствам для регулирования натяжения полосового материала при его транспортировке и может быть использовано, например, в процессах производства и обработки шинного корда, транспортерных лент, тканей и т. д.
Известно устройство для регулирования натяжения полосы упругого материала при ее транспортировке, содержащее датчик и задатчик натяжения, датчики линейной скорости выбирающих и подающих валов, подключенные к входам корректирующего блока, выход которого подключен к входу регулятора тока двигателя выбирающего вала, второй вход которого связан с датчиком тока 1.
Недостатками известного устройства являются сложность системы регулирования и недостаточное ее быстродействие.
Целью изобретения является упрощение конструкции и повыщение быстродействия ее.
Цель достигается тем, что корректирующий блок выполнен в виде последовательно подключенных масштабирующего усилителя, интегратора и множительного звена, выход которого подключен к одному из входов масщтабирующего усилителя, другие входы которого связаны с датчиками линейной скорости валов, при этом выход регулятора натяжения подключен к третьему входу регулятора тока, а второй вход множительного звена корректирующего блока связан с датчиком линейной скорости выбирающего вала.
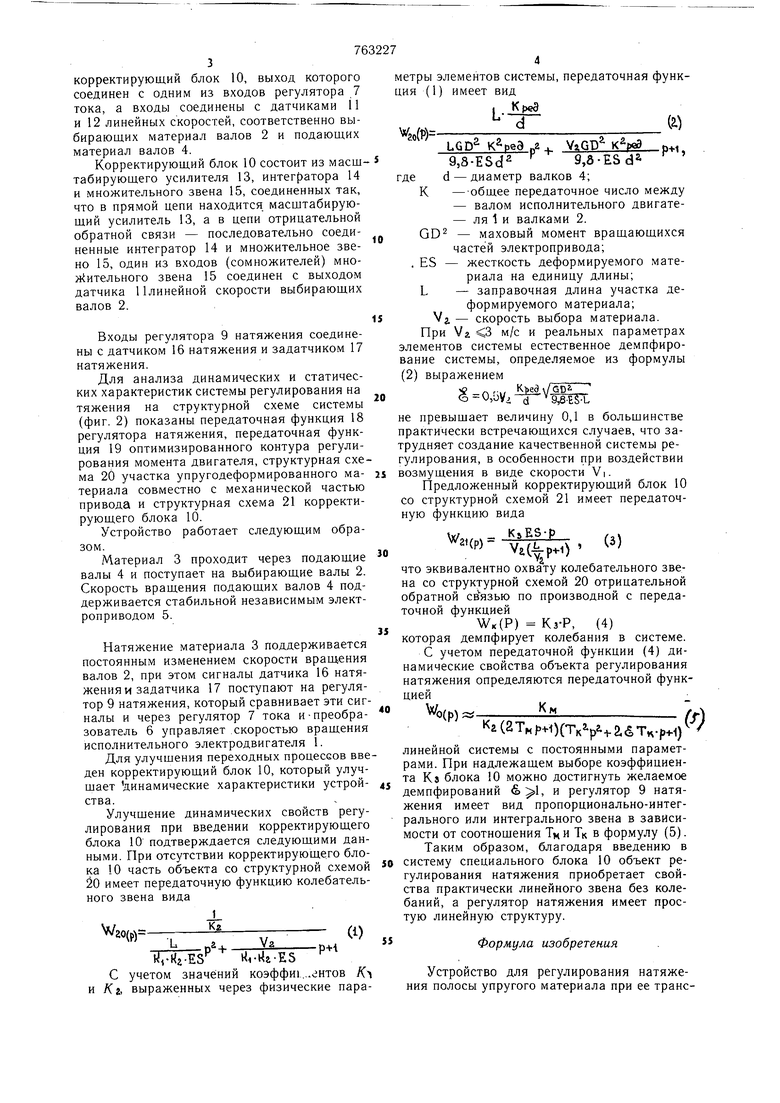
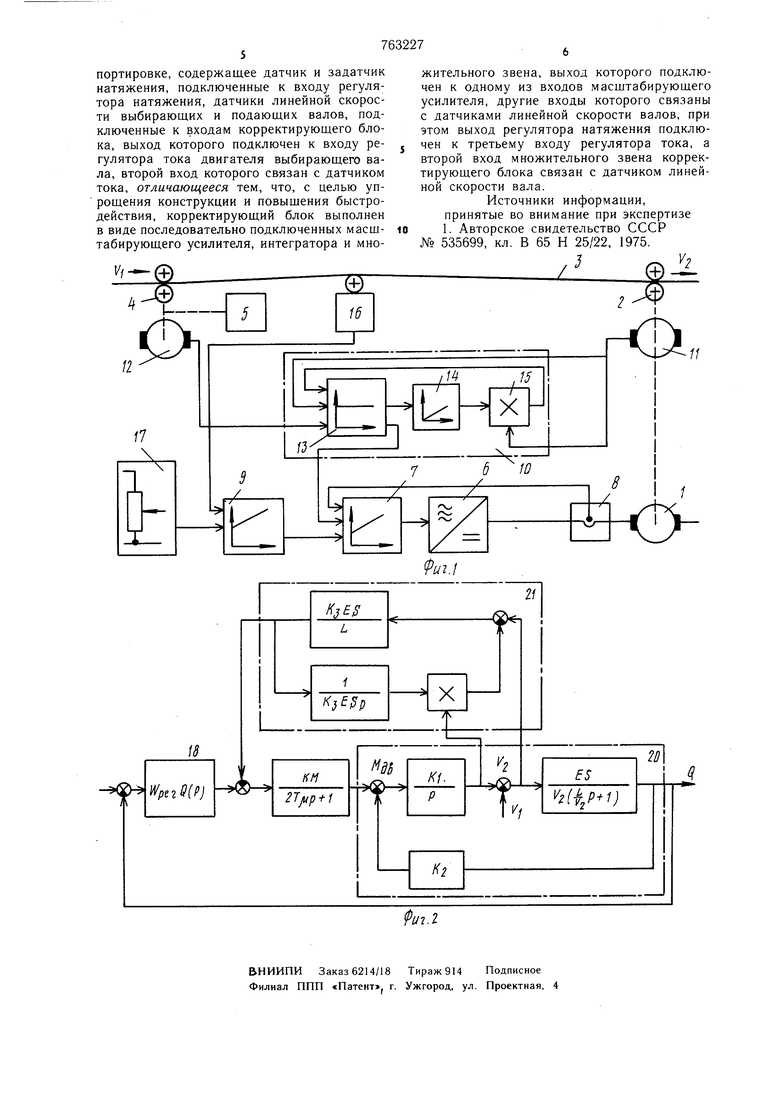
На фиг. 1 показана функциональная схема устройства; на фиг. 2 - структурная схема устройства.
Устройство содержит электродвигатель 1 постоянного тока, приводящий во вращение выбирающие валы 2, отводящие материал 3 от участка между подающими валками 4 и
15 выбирающими валами 2. Подающие валы 4 имеют независимый электропривод 5.
Электродвигатель 1 питается от преобразователя 6, который управляется регулятором 7 тока, два входа которого подключены соответственно к датчику 8 тока и регулятору 9 натяжения.
Для коррекции динамических свойств объекта регулирования натяжения введен корректирующий блок 10, выход которого соединен с одним из входов регулятора 7 тока, а входы соединены с датчиками (1 и 12 линейных скоростей, соответственно выбирающих материал валов 2 и подающих материал валов 4. Корректирующий блок 10 состоит из масщ табирующего усилителя 13, интегратора 14 и множительного звена 15, соединенных так, что в прямой цепи находится масщтабирующий усилитель 13, а в цепи отрицательной обратной связи - последовательно соединенные интегратор 14 и множительное звено 15, один из входов (сомножителей) мнол ительного звена 15 соединен с выходом датчика Плинейной скорости выбирающих валов 2. Входы регулятора 9 натяжения соединены с датчиком 16 натяжения и задатчиком 17 натяжения. Для анализа динамических и статических характеристик системы регулирования на тяжения на структурной схеме системы (фиг. 2) показаны передаточная функция 18 регулятора натяжения, передаточная функция 19 оптимизированного контура регулирования момента двигателя, структурная схема 20 участка упругодеформированного материала совместно с механической частью привода и структурная схема 21 корректирующего блока 10. Устройство работает следующим образом. Материал 3 проходит через подающие валы 4 и поступает на выбирающие валы 2. Скорость вращения подающих валов 4 поддерживается стабильной независимым электроприводом 5. Натяжение материала 3 поддерживается постоянным изменением скорости вращения валов 2, при этом сигналы датчика 16 натяжениям задатчика 17 поступают на регулятор 9 натяжения, который сравнивает эти сигналы и через регулятор 7 тока и-преобразователь 6 управляет скоростью вращения исполнительного электродвигателя 1. Для улучшения переходных процессов вве ден корректирующий блок 10, который улучшает динамические характеристики устройства. Улучшение динамических свойств регулирования при введении корректирующего блока 10 подтверждается следующими данными. При отсутствии корректирующего блока 10 часть объекта со структурной схемой 20 имеет передаточную функцию колебательного звена вида Wao(|.)ЙгНг-Ез гЙг.Е5 С учетом значений коэффи1„.ентов К и /С г. выраженных через физические параметры элементов системы, передаточная функция (1) имеет вид I t W,(p)-IJ ) LGD р2 . 9,8-ESci 9,d-ESda где d - диаметр валков 4; К --общее передаточное число между -валом исполнительного двигате-ля 1 и валками 2. GD - маховый момент вращающихся частей электропривода; . ES - жесткость деформируемого материала на единицу длины; L - заправочная длина участка деформируемого материала; Vi - скорость выбора материала. При Уг 3 м/с и реальных параметрах элементов системы естественное демпфирование системы, определяемое из формулы (2) выражением 5г л-1/ JifeS§./ GSlIir (o-UjOVi ЭДЁРС, не превышает величину 0,1 в большинстве практически встречающихся случаев, что затрудняет создание качественной системы регулирования, в особенности при воздействии возмущения в виде скорости Vi. Предложенный корректирующий блок 10 со структурной схемой 21 имеет передаточную функцию вида W KsES-p ЧТО эквивалентно охвату колебательного звена со структурной схемой 20 отрицательной обратной свиязью по производной с передаточной функцией W.(P) КгР, (4) которая демпфирует колебания в системе. С учетом передаточной функции (4) динамические свойства объекта регулирования натяжения определяются передаточной функциейК2(2ТнК1)(.6Тк.ри) линейной системы с постоянными параметрами. При надлежащем выборе коэффициента К j блока 10 можно достигнуть желаемое демпфирований €.1, и регулятор 9 натяжения имеет вид пропорционально-интегрального или интегрального звена в зависимости от соотношения Тщи Тк в формулу (5). Таким образом, благодаря введению в систему специального блока 10 объект регулирования натяжения приобретает свойства практически линейного звена без колебаний, а регулятор натяжения имеет простую линейную структуру. Формула изобретения Устройство для регулирования натяжения полосы упругого материала при ее транспортировке, содержащее датчик и задатчик натяжения, подключенные к входу регулятора натяжения, датчики линейной скорости выбирающих и подающих валов, подключенные к входам корректирующего блока, выход которого подключен к входу регулятора тока двигателя выбирающего вала, второй вход которого связан с датчиком тока, отличающееся тем, что, с целью упрощения конструкции и повыщения быстродействия, корректирующий блок выполнен в виде последовательно подключенных масштабирующего усилителя, интегратора и множительного звена, выход которого подключен к одному из входов масщтабирующего усилителя, другие входы которого связаны с датчиками линейной скорости валов, при этом выход регулятора натяжения подключен к третьему входу регулятора тока, а второй вход множительного звена корректирующего блока связан с датчиком линейной скорости вала.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 535699, кл. В 65 Н 25/22, 1975.
