t
Изобретение относится к подъемнотранспортному оборудованию, в частности к пакетоформирующим машинам при производстве рулонных материалов, например руОерокда, и может исполь- 5 зоваться при комплексной механизации. по безподдонной транспортировке,складированию и погрузке рулонных материалов.
Известен автомат для укладки ру- 10 лонов на плоский поддон ij . Автомат содержит раму, .наклонную горку с выравнивающим устройством и приемный стол, снабженный механизмом его поворота вокруг оси в вертикальной f плоскости.
Его недостатком является то, что он имеет малую производительность и, выполняет укладку рулонов на поддон; а такой способ является нерациональ- 20 ным, так как требует большого количества поддонов.
Известен также автомат для уклад--ки рулонов в пакет содержащий посл довательно установленные накопитель- 2 ную горку с выравнивающим устройством, поворотный в вертикальной плосг кости от привода приемный стол с на,клонной платформой и механизм формилэрвания пакета, установленный на 0
горизонтальных направляющих с возможностью поступательного перемещения, при этом на горке закреплен отсекатель рулонов, а на приемном сто ле - кронштейны для удержания рулоноц, 2j .
Недостаток этого автомата заключа,ется в том, что он осуществляет укладку рулонов в пакет на поддоне.
Цель изобретения - упрощение конструкции автомата путем укладки рулонов в пакет без поддонов.
Для этого механизм формирования пакета выполнен в виде тележки с щелевым основанием, снабженным с трех сторон опорными стенками, установленной на упомянутых горизонтсшьных направляющих с возможностью возвратно-поступательного движения от привода, причем горизонтальные направляющие расположены под углом к направлению перемещения рулонов, равным углу наклона упомянутой платформы.
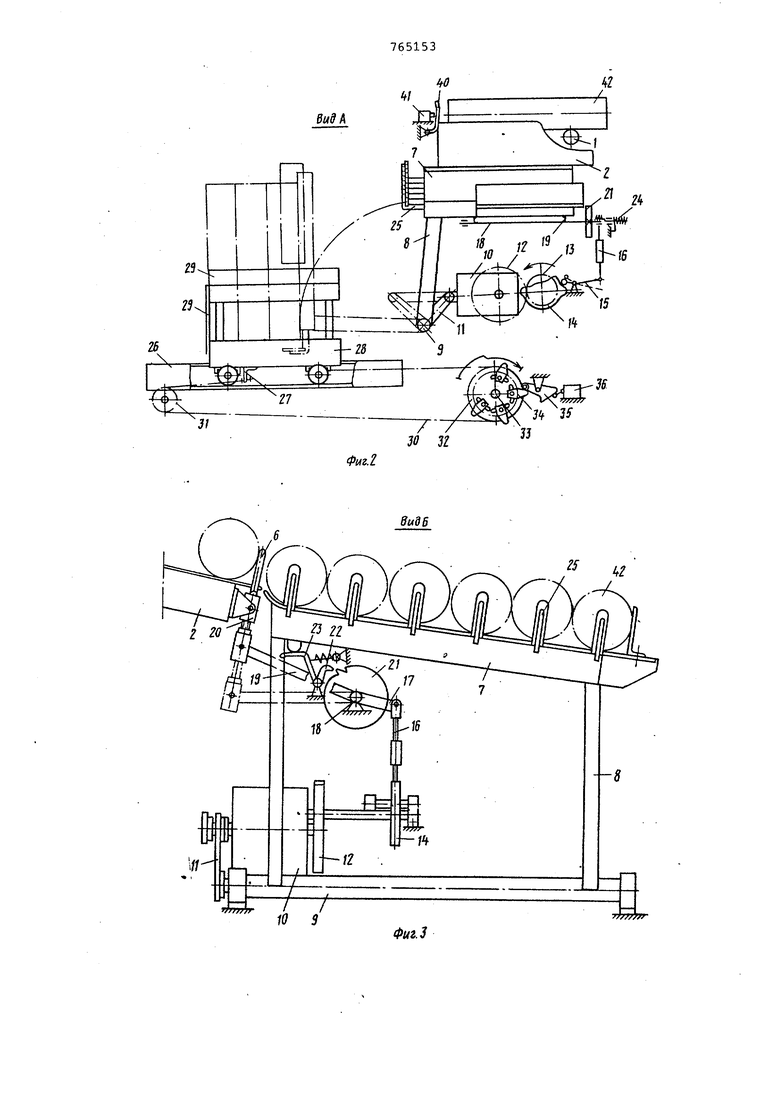
Кроме того, кронштейны и наклонная платформа могут быть закреплены на Приемном столе жестко, а отсекатель может быть связан с приводом приемного стола с возможностью перемещения в вертикальной плоскости. При этом привод тележки содержит электродвигатель, зубчатые колеса, закрепленные на его приводном валу, тяговую цепь, огибающую упомянутые звездочки, храповые механизмы и кулачки,взаимодействующие с конечным выключателем. На фиг.1 изобрс1жен предлагаемый автомат, вид сверху; на фиг.2 - вид по стрелке А на фиг.1; на фиг.З - вид по стрелке Б на фиг.1; на фиг.4- вид по стрелке В на фиг.1. Автомат содержит подающий рольганг 1 и наклонную накопительную гор ку 2. С рольганга 1 на накопительную горку 2 рулоны перемещаются сталкива телем 3, получающим движение от элек тропривода 4 через кривошипно-шатунный механизм 5. В конце накопительно горки установлен отсекатель б, за которым следует наклонная платформа 7 приемного стола 8, шарнирно устано вленного в подшипниках посредством вала 9. Поворот стола 8 вокруг оси вала 9 осуществляется от отдельного электропривода 10 с редуктором и кривошипно-шатунного механизма11. Привод отсекателя б осуществляется от электропривода 10 поворота сто ла через зубчатые колеса 12 и 13 с передаточным отношением- :, дисковый кулачок 14, двуплечий рычаг 15, тягу 16, рычаг 17, вал 18 с рычагами 19, концы которых шарнирно соединены со штоками отсекателя б, перемещающи ся во втулках 20, .также шарнирно прикрепленных к накопительной горке 2. На валу 18 установлено храповое колесо 21, с которым взаимодействует подпружиненная собачка 22 с рычагом 23. На валу 18 установлена также пружина скручивания 24. На платформе 7 приемного стола жестко установлены кронштейны 25. На направляющих 26 установлена тележка 27, имеющая щелеобразное основание 28 с опорными стенками 29. Привод тележки осуществляется цепью 30, жестко скрепленной двумя концами D рамой тележки 27 звездочек 31 и Приводных звездочек 32, на валу 33 которых устанавливаются кулачки 34, воздействующие посредством рычага.35 на конечный выключатель 36,.управляющий электроприводами 37 и 10. Электропривод 37 через систему зубчатых колес и храповых механизмов 38 и 39 сообщает тележке 27 шагово-поступательное перемещение с рабочей скоростью вперед для загрузки тележки рулонами и ускоренный холостой ход в обратном направлении. В конце рольганга 1 установлена (иарнирно планка 40 и конечный выключатель 41, которые в совокупности представляют выравниватель рулонов. Автомат работает следующим образом. Рулон 42, двигаясь по рольгангу 1, упирается в планку 40 и воздей ствует на конечный выключатель 41, который дает команду на включение электропривода 4, .который через кривошипно-шатунный механизм 5 приводит сталкиватель 3 в поступательно-возвратное движение и рулон 42 перемещается на наклонную накопительную горку 2. При отсутствии на наклонной платформе 7 нужного количества рулонов отсекатель б находится в утопленном состоянии и рулон 42 с горки 2 перекатывается на наклонную платформу 7 приемного стола 8. После заполнения платформы 7 нужным количеством рулонов, например, естью рулонами, включается электро-: привод 10 ичерез кривошипно-шатуннЕлй механизм 11 приемный стол 8 поворачивается вокруг оси Всша 9. С опережением, от того же электропривода 10редуктора, через зубчатые колеса 12 и 13, кулачок 14, двуплечий рычаг 15, тягу 16, рычаг 17, вал 18 и рычаГи 19 поднимается отсекатель 6, который стопорится в верхнем положении подпружиненной собачкой 22 через храповЬе колесо 21 и удерживает рулонц 42 на наклонной горке 2, в то время как приемный стол 8 кантует набранный ряд рулонов в вертикальное положение и устанавливает их на щелеобразное основание 28. При этом кронштейны 25 платформы 7 свободно проходят в щели основания 28 тележки 27, таким образом рулоны 42 оказываются установленными на основание 28 тележки 27. Опорные стенки 29 надежно обеспечивают вертикальное положение рулонов 42. После поворота приемного стола на 90° подается команда на отключение электропривода 10 и включение электропривода 37, который сообщает посредством системы зубчатых колес и храпового механизма 38 прямое вращение ведущим звездочкам 32 привода тележки 27. При передвижении тележки на один шаг, равный .диаметру рулона 42, один из кулачков 34, укрепленный на валу 33, отключает посредством рычага 35 и конечного выключателя 36 электропривод 37 и включает электропривод 10 возвращения стола 8 в исходное положение. При этом платформа 7 воздействует на рычаг 23 и собачка 22 освобождает храповое колесо 21, под действием пружины 24 отсекатель б опускается ниже плоскости накопительной горки 2 и рулоны 42 скатьшаются на наклонную платформу 7 приемного стола 8. После заполнения плат4 формы 8 нужным количеством рулонов цикл повторяется. При этом тележка 27 совершает шагово-поступательное движение до тех пор, пока будет заполнено щелеобразное основание 28, т.е.установится нужное, количество ядов рулонов.
Количество рядов рулонов определяется числом кулачков 34, укрепленных на валу 33 приводных звездочек 3 тележки 27.
После заполнения тележки 27 рулог нами 42 сформированный пакет снимается захватным устройством, после чего тележка 27 через храповой меха4низм 39 с ускорением возвращается в исходное положение, и вновь готова к приему рулонов 42 и формированию очередного пакета.
Формула изобретения
1. Автомат для укладки рулонов в пакет, содержащий последовательно установленные накопительную горку с выравнивающим устройством, поворотный в вертикальной плоскости от при вода приемный стол с наклонной платформой и механизм формирования пакета, установленный на горизонтальных направляющих с возможностью поступательного перемещения, при йтом на горке закреплен отсекатель рулонов, а на приемном столе - кронштейны для удержания рулонов, отличающийся тем, что, с целью упрощения конструкции автомата путем укладки рулонов в пакет без поддонов механизм формирования пакета выполне в виде тележки с щелевым основанием.
снабженным с трех сторон опорными стенками, установленной на упомянутых горизонтальных направляющих с возмойностью возвратно-поступательного движения от привода, причем горизонтальные направляющие расположены под углом к направлению перемещения рулонов, равным углу наклона упомянутой платформы.
2. Автомат поп.1, отличающийся тем, что кронштейны и
0 наклонная платформа закреплены на приемном столе жестко.
3. Автомат поп.1, отличаю щ и и с я тем,что отсекатель связан с приводом приемного стола с возможностью перемещения в вертикальной
5 плоскости.
4. Автомат поп.1, отличающийся тем, что привод тележки содержит -электродвигатель, зубчатые колеса, закрепленные на его привод0ном валу, тяговую цепь, огибающую упомянутые звездочки, храповые механизмы и кулачки, взаимодействующие с конечным выключателем.
Источники информации,
5 принятые во внимание при экспертизе
1.Патент Японии 9122, 1968.
2.Авторское свидетельство СССР 530834, кл. В 65 G 57/24, 1972 (прототип). 6 19 23 22 21 . 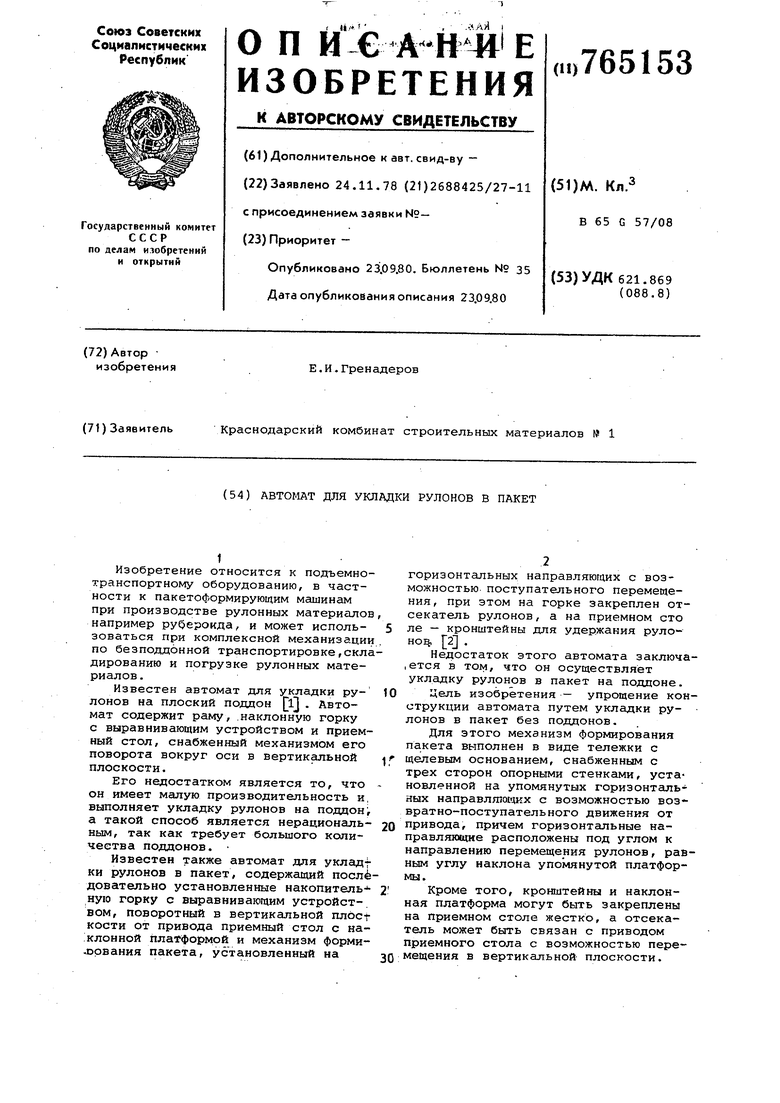
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для укладки рулонов на плоский поддон | 1972 |
|
SU530834A1 |
| Автомат для укладки рулонов на плоский поддон | 1979 |
|
SU781164A1 |
| Автомат для укладки цилиндрических изделий в пакет | 1979 |
|
SU887385A1 |
| ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ ЛИСТОВОГО ПРОФИЛЯ | 2004 |
|
RU2257273C1 |
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| Агрегат для брикетирования штучных изделий | 1976 |
|
SU653136A1 |
| Автомат для укладки рулонов | 1977 |
|
SU734104A1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
| Устройство для пакетирования бревен и выравнивания их торцов | 1974 |
|
SU602436A1 |

«
29
