: - / 1 .- ; :. -: ;;;;;::;,
Изобретение относится к металлообрабатывакнцим станкам, а именно к устройствам для подачи заготовок.
По основному авт.. св. № 618253 известно устройство для подачи заго- 5 товки, содержащее подвижный в Направляющих корпус с захватами и подъемную опору, причем направлякадие кор- ; пуса подпружинены относительно подъем-ной опоры, а захваты установлены на О штоках гидроцилиндров., .
Однако такое устройство не устраняет боковое трение на направляющих корпуса, их износ и увеличивает тре- 15 буемое усилие подачи, так как при про движении неровной заготовки по подъемной опоре в виде ролика, ее ось стремится сместиться относительно корпуса подгиощего устройства в горизон- 20 тальном направлении, но такому смещению препятствуют захваты, зафиксировавшие заготовку относительно подвижного корпуса, как в продольном, (в направлении подачи), так и в по- 25 перечном направлении.
: Для повыаения надежности устройства путем сообщения заисватам подвижности в поперечном направлении один из захватов кинематически связан со 30
SiSaHss..-ies«s52SiS 5je®as3i(
штоком цилиндра, эакрейленнбго на
иПротивоположнЬм захвате..
Кинематическая связь захвата со штоком цилиндра может быть выйолйена при помощи шарнирно закрепленной на.штоке цилиндра ползушки и винта .с правой левой резьбой, взаимодействующего с резьбовьаии отверстиями захвата и ползушки.
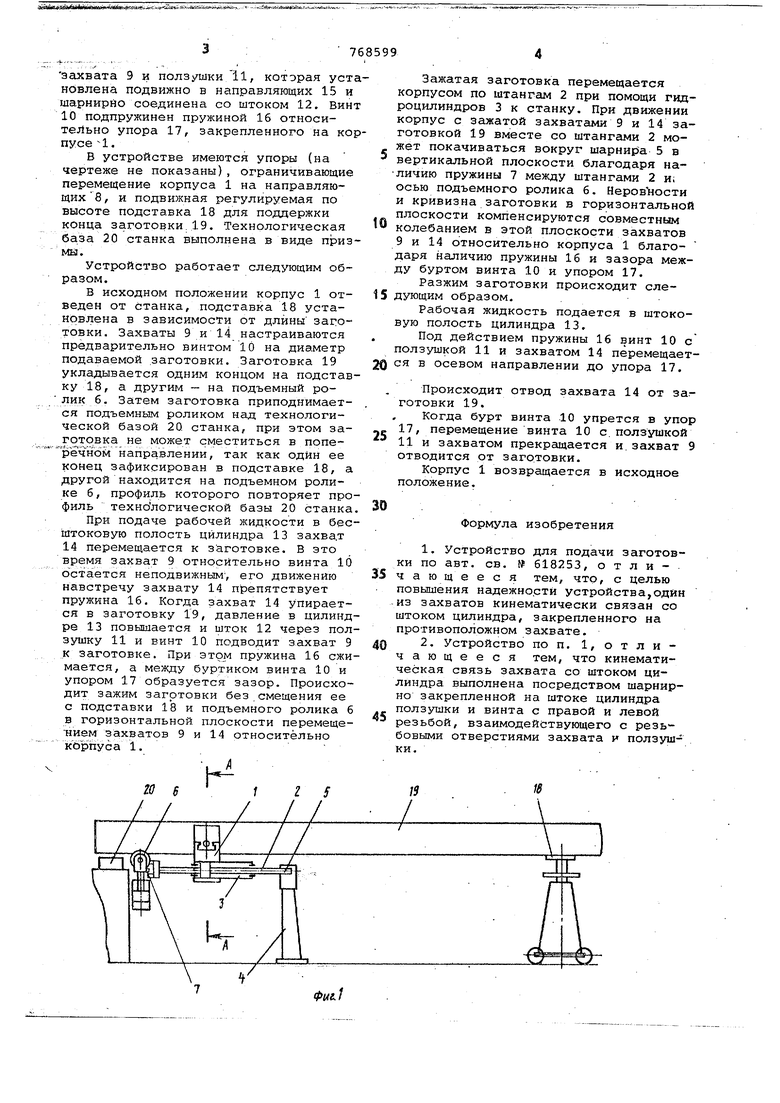
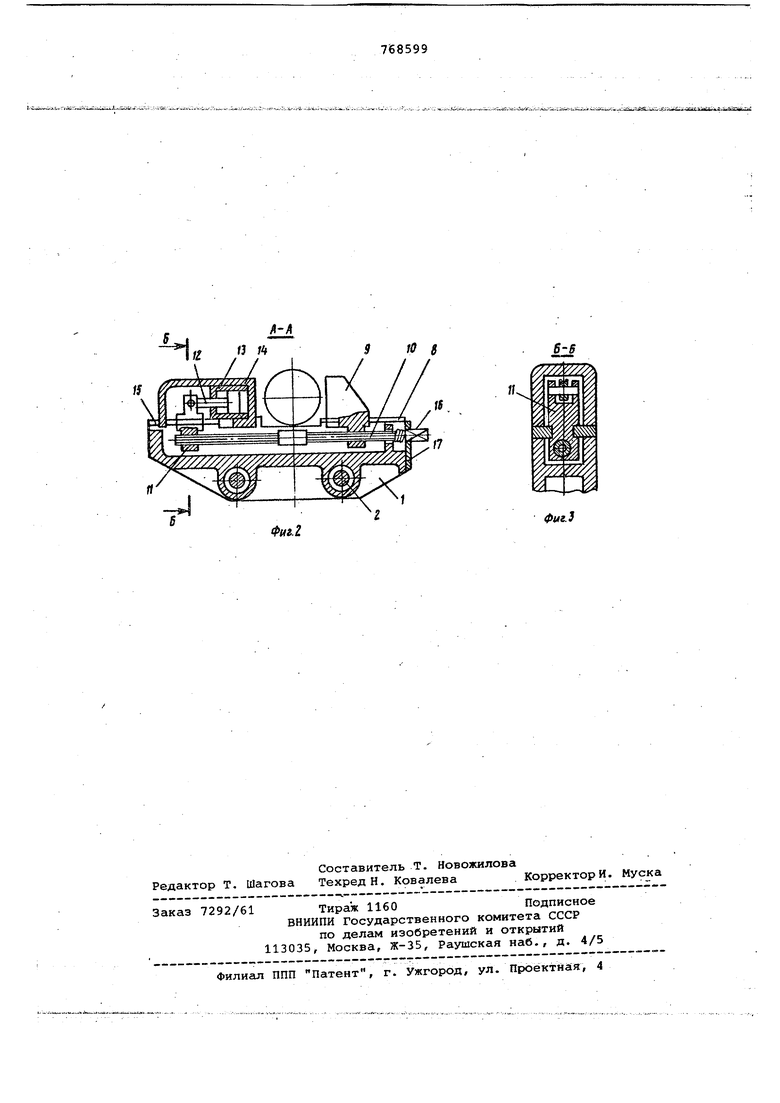
На фиг. 1 показано предлагаемое устройство, общий вид; на фчг. 2 дан поперечный разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Устройство для подачи заготовки содержит Подвижный корпус 1, установленный с возможностью перемещения по направляющим штангам 2, являющимся штоками цилиндров 3. Направляющие 2 одним концом закреплены на стойке 4 при помощи шарнира 5, а другим - на подъемном ролике (6 и подпружинены относительно последнего пружинами 7. На корпусе 1 подвижно в направляющих 8 установлен захват 9 посредстве винта 10 и позушкиЦ, связанный со штоком 12 цилиндра 13, закрепленного на захвате 14. Захват 14 установлен подвижно в направляющих 15 на корпусе 1. Винт 10 имеет правую и левую резьбу и сопряжен с резьбовым отверстиями
захвата 9 и полз/шки il, которая установлена подвижно в направляющих 15 и шарнирйо соединена со штоком 12. Винт 10 подпружинен пружиной 16 относительно упора 17, закрепленного на корпусе 1.
В устройстве имеются упоры (на чертеже не показаны), ограничивающие перемещение корпуса 1 на направляющих 8, и подвижная регулируемая по высоте подставка 18 для поддержки конца заготовки.19. Технологическая база 20 станка выполнена в виде призмы.
Устройство работает следующим образом.
В исходном положении корпус 1 отведен от станка, подставка 18 установлена в зависимости от длины заготовки. Захваты 9 и 14 настраиваются предварительно винтом 10 на диаметр подаваемой .заготовки. Заготовка 19 укладывается одним концом на подставку 18, а другим - на подъемный ролик 6. Затем заготовка приподнимается подъемным роликом над технологической базой 20. станка, при этом заготовка не может сместиться в попе рёчноМ направлении, так как одИн ее конец зафиксирован в подставке 18, а другой находится на подъемном ролике 6, профиль которого повторяет профиль технологической базы 20 станка. При подаче рабочей жидкости в бесхатоковую полость цилиндра 13 захват 14 перемещается к заготовке. В это время захват 9 относительно винта 10 остается неподвижным , его движению навстречу захвату 14 препятствует пружина 16. Когда захват 14 упирается в заготовку 19, давление в цилиндре 13 повышается и шток 12 через ползушку 11 и винт 10 подводит захват 9 к заготовке. При этом пружина 16 сжимается, а между буртиком винта 10 и упором 17 образуется зазор. Происходит зажим заготовки без смещения ее с подставки 18 и подъемного ролика 6 в горизонтальной плоскости перемещением захватов 9 и 14 относительно корпуса 1,
Зажатая заготовка перемещается корпусом по штангам 2 при помощи гидроцилиндров 3 к станку. При движении корпус с зажатой захватами 9 и 14 заготовкой 19 вместе со штангами 2 может покачиваться вокруг шарнира 5 в - вертикальной плоскости благодаря наличию пружины 7 между штангами 2 и; осью подъемного ролика 6. Неров11ости и кривизна заготовки в горизонтальной компенсируются совместным колебанием в этой плоскости захватов 9 и 14 относительно корпуса 1 благодаря наличию пружины 16 и зазора между буртом винта 10 и упором 17.
Разжим заготовки происходит следующим образом.
Рабочая жидкость подается в штоковую полость цилиндра 13,
Под действием пружины 16 винт 10 с ползушкой 11 и захватом 14 пёремещает0 ся в осевом направлении до упора 17.
Происходит отвод захвата 14 от за.готовки 19.
, Когда бурт винта 10 упрется в упор 17, перемещение винта 10 с. ползушкой 11 и захватом прекращается и.захват 9 отводится от заготовки.
Корпус 1 возвращается в исходное положение.
Формула изобретения
1. Устройство для подачи заготовки по авт. св. № 618253, о т л и 5 чающееся тем, что, с целью повышения надежности устройства,один из захватов кинематически связан со штоком цилиндра, закрепленного на противоположном захвате.
0 2. Устройство поп, 1, отличающееся тем, что кинематическая связь захвата со штоком цилиндра выполнена посредством шарнирно закрепленной на штоке цилиндра ползушки и винта с правой и левой резьбой, взаимодействующего с резьбовыми отверстиями захвата и ползушки.
19
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕРЕВООБРАБАТЫВАЮЩИЙ НАСТОЛЬНЫЙ КОМБИНИРОВАННЫЙ СТАНОК | 1992 |
|
RU2015877C1 |
| Устройство для подачи материала в зону обработки | 1987 |
|
SU1442299A1 |
| Станок для двухсторонней гибки труб | 1973 |
|
SU501802A1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ГИБКИ СТЕРЖНЕВЫХ ЗАГОТОВОК | 2004 |
|
RU2270732C1 |
| Станок для изготовления змеевиков | 1981 |
|
SU967612A1 |
| Автомат для изготовления проволочных граблин | 1980 |
|
SU925493A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Штамповочный комплекс | 1988 |
|
SU1609537A1 |
| Устройство для сборки запрессовкой деталей типа вал-втулка | 1986 |
|
SU1333527A1 |
| Станок для сгибания фигурных изделий | 1981 |
|
SU1028406A1 |
Л-Д
Фнг.2
10 8
Фиг.}
