54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи бортовых крыльев к барабану для сборки покрышек пневматических шин | 1979 |
|
SU845345A1 |
| Захватный орган манипулятора | 1978 |
|
SU778876A1 |
| Механизм шагового перемещения | 1985 |
|
SU1263494A1 |
| Манипулятор | 1986 |
|
SU1313688A1 |
| Устройство для отделения листовых заготовок от стопы | 1980 |
|
SU978987A1 |
| Манипулятор | 1980 |
|
SU908588A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Захватное устройство для длинномерных изделий | 1988 |
|
SU1731718A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
1
Изобретение относится к машине- строению, а более конкретно к манипуляторам для промышленного применения.
Известен манипулятор, содержащий основание, руку, механизм подъема и 5 поворота 13 .
Недостатком известного манипулятора является то, что при вертикальных ходах, превышающих по своей величине 1-1,5 диаметра приводного цилинд- Ю ра, значительно усложняется конструкция, так как появляется необходимость увеличения направляющей части цилиндра, что вызывает увеличение вертикальных размеров и сужает технологи- 15 ческие возможности.
Целью изобретения является расширение технологических возможностей.
Цель достигается благодаря тому, что механизм перемещения исполни- 20 тельных органов снабжен траверсой и полым валом, установленным с возможностью поворота и возвратно-поступательного перемещения, привод подъема выполнен в виде, по меньшей 25 мере, двух силовых цилиндров, штоки которых прикреплены к траверсе симметрично относительно полого вала, привод поворота снабжен регулируе, упорами и пинолью, на пиноли 30
закреплены две шестерни зубчатореечного механизма, одна из которых связана с рейкой, на концах которой установлены регулируемые упоры.
Полый вал связан с траверсой с возможностью регулировки его положения по высоте посредством втулки, свободно посаженной на него, в пазах которой расположены клиньч, взаимодействующие, с одной стороны, с конической поверхностью накидного кольца, поджимаемого гайкой, взаимодействующей с резьбовой поверхностью втулки, и, с другой стороны, с по- : верхностью полого вала.
На втулке, свободно насаженной на полый вал, выполнены призматические выступы, взаимодействующие с поверхностями призматических впадин, выполненных на торце пиноли.
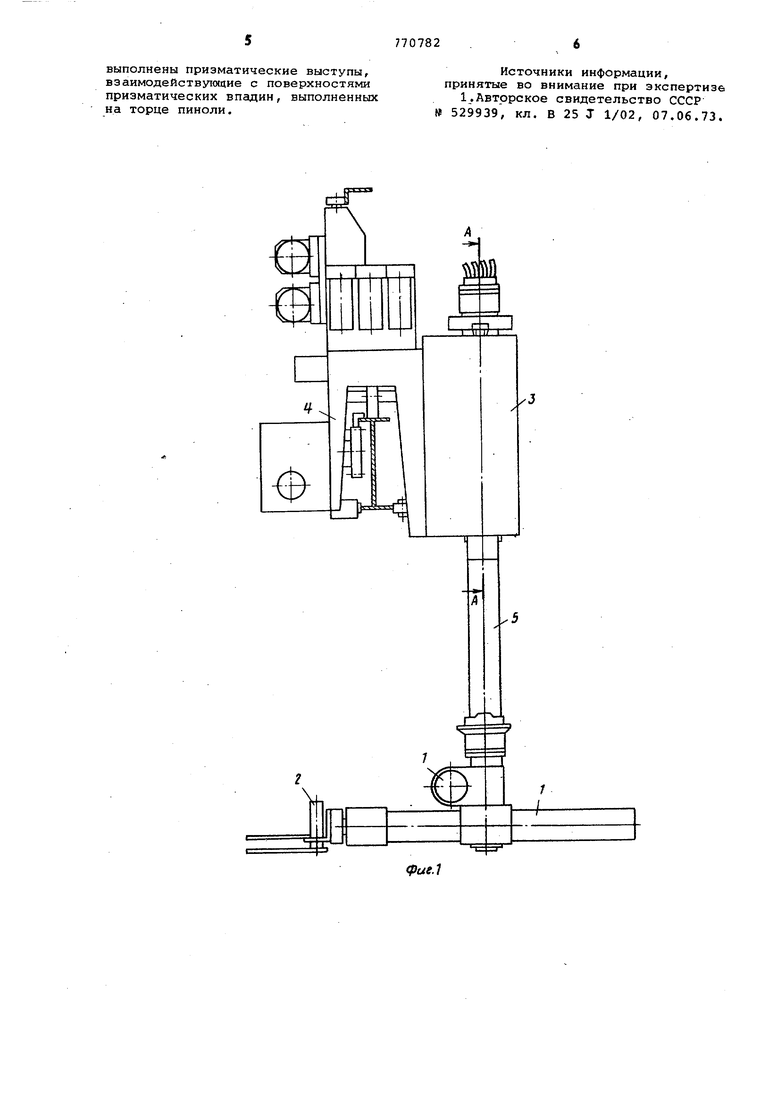
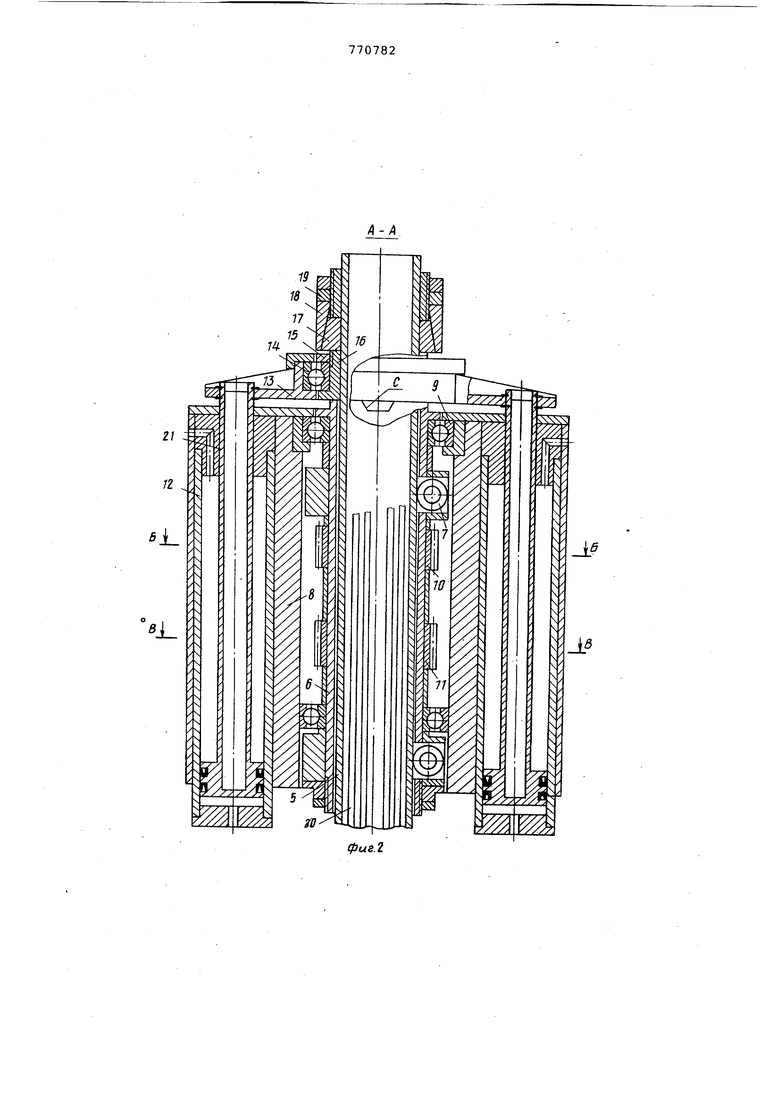
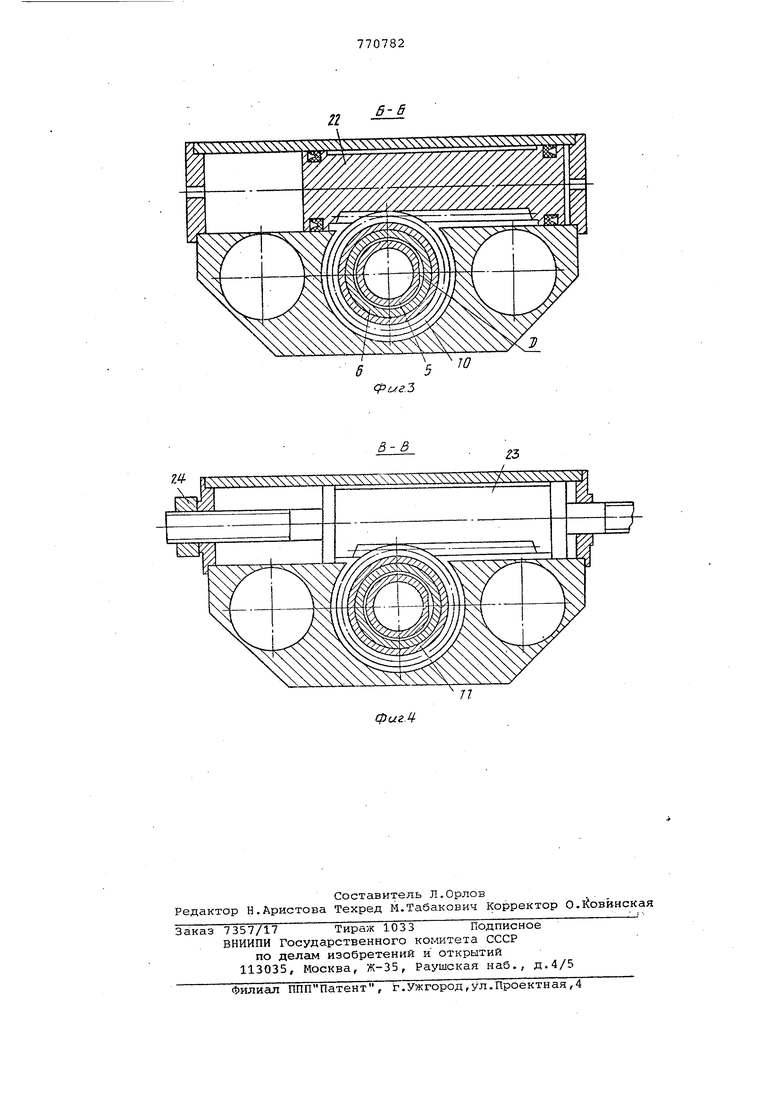
На фиг. 1 изображен общий вид манипулятора; на фиг. 2 - разрез А-А на фиг. 1;.на фиг. 3 - разрез Б-Б на фиг.2; на фиг. 4 - разрез В-В на фиг.2.
Манипулятор состоит из исполнительных органов 1 с захватными элементами 2, механизма перемещения исполнительных органов 3 и основания 4 (см.фиг.1). Полый вал 5 установлен в линоли 6 с помощью двух направляющих 7, содержащих по 3 ролика каждая.. От проворота относительно пиноли 6 в процессе верт кальнд го перемещения Полый, вал 5 предохраняется с помощью лыски и одного из vpex роликов направляющих 7, перемещакадихся по ней. Пиноль б установлена в корпусе 8 с помощью двух подшипников 9. На пиноли 6 закреплены две шестерни 10 и 11. В корпусе 8 установлены также два силовых цилиндра 12. В верхней части полни вал 5 закреплен в траверсе..13 с помощью подшипника 14, гайки 15, втулки 16, клиньев 17, накидного кольца 18 и гаек- 19. Призматические выступы С на втулке 16 входят в соответствующие впадины в пиноли б. Внутри полого вала 5 рах:положенн шланги 20 подвода рабочей среды к исполнительным органам и захватным элементам. Штоки 21 приводов подъема закреплены на концах траверсы 13 (см.фиг. 2,3).
Шестерня10 находится в зацеплении G рейкой 22, являющейся одновременно рейкой-поршнем силового цилиндра поворота (см.фиг.3). Шестерня 11 находится в зацеплении с рейкой 23.. На концах этой рейки закреплены упор 24 (см.фиг.4, упор справа на чертеже не показан).
Манипулятор работает следующим образом.
В исходном положении полый вал 5 и штоки 21 приводов подъема находятся в нижнем положении, а рейки 22 и 23 - в правом положении, как показано на фиг, 2,3,4. Эти положения приводных элементов соответствуют положению исполнительных органов, показанному на фиг.1. В зависимости от заложенной программы рабочая среда может подаваться или в бесштоковую полость силовых цилиндров 12, или в правую полость цилиндра привода поворота, или одновременно в обе эти полости. При подаче рабочей среды в бесштоковую полость цилиндров 12 усилие черезштоки 21 передается на траверсу 13, подшипник 14, гайку 15, затем на втулку 16, ас нее через клинья 17 и накидное кольцо 1.8 - на полый вал 5. При подаче рабочей среды в штоковые полости цилиндров 12 полый вал 5 возвращается в исходное положение. При этом призматические выступы С на втулке 16 (см.фиг.2) входят в соответствующие впадины на пиноли б, обеспечи. вая силовое зa ыкaниe между втулкой 16 и пинолью 6.
При подаче рабочей среды в правую полость цилиндра привода поворота усилие от рейки 22 передается на шестерню 10, далее через пиноль 6 и призматические выступы С на .втулку 16, а от нее - на полый вал
Под действием этой силы полый вал 5 поворачивается.
При одновременной подаче рабочей среды в приводы поворота и подъема усилие от рейки 22 передается шестерне 10, пиноли 6, а от нее через роли направляющей 7 и лыску - на полый вал 5. Одновременно с передачей усилия от привода поворота на полый вал крутящий момент передается шестерне 11, а от нее - рейке 23. Последняя перемещается в крайнее левое положение. Это перемещение ограничивается упором 24, закрепленным на правом конце рейки. Исполнительные органы 1 с захватными элементами 2 могут срабатывать в любой момент независимо от положения полого вала 5. Рабочая среда к ним подается от основания 4, где расположена соответствующая аппаратура, через шланги 20, расположенные внутри полого вала 5.
Формула изобретения
3,Манипулятор по п.1, о т л .и чающийся тем, что, с целью предохранения полого вала от прово.рота относительно пиноли, на втулке, свободно насаженной на полый вал.
выполнены призматические выступы, взаимодействутащие с поверхностями призматических впадин, выполненных на торце пиноли.
Источники информации, принятые во внимание при экспертизе
19
2/ :в
фиг.2
6-6
фигЛ
