t
Изобретение относится к подъемна-транспортному оборудованию.
Известно устройство для загрузки и разгрузки емкости, содержащее подъемно-опускной захват, связанный посредством гибких тяговых оргапов с приводом подъема l. Однако известное устройство ненадежно в эксплуатации, так как не обеспечиваетJQ достаточного фиксирования груза при перемещении его на большую высоту.
Цель изобретения - повышение надежности работы путем обеспечения строгого фиксирования груза. , 5
Это достигается тем, что предлагаемое устройство снабжено центриругацим механизмом, содержащим две плиты, размещенные одна под другой, в которых выполнены сквозные отверс- 20 тия для прохода гибких тяговых органов, и вертикальные направляющие,закрепленные на внутренних стенках емкости, в которых подвижно установлена верхняя плита, при зтом в нижней плите 25 выполнены пазы, а в верхней части 3 1хвата выполнены выступы, входящие в пазы нижней плиты, причем верхняя и нижняя плиты связаны между собой посредством пантографа.зо
Кроме того, обе плиты снабжены горизонтальными направляющими, в которых установлены с возможностью горизонтального перемещения связанные с плитами шарниры пантографа и вертикальными направляющими, в которых установлены средние шарниры пантографа.
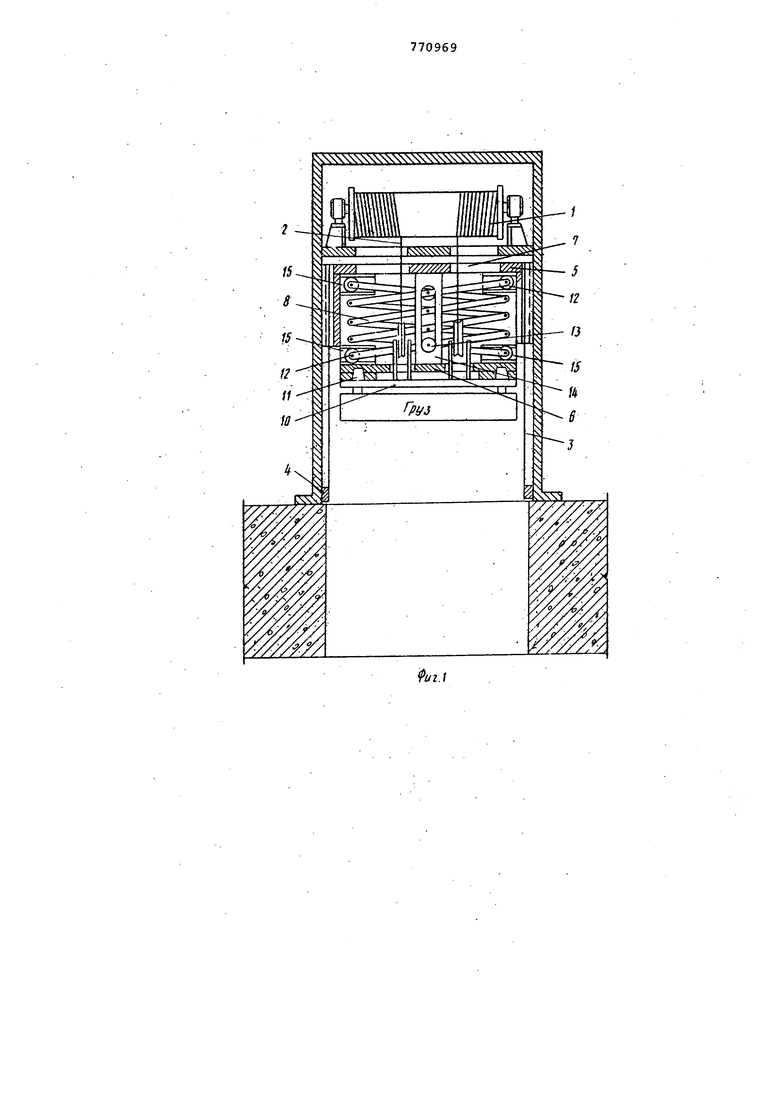
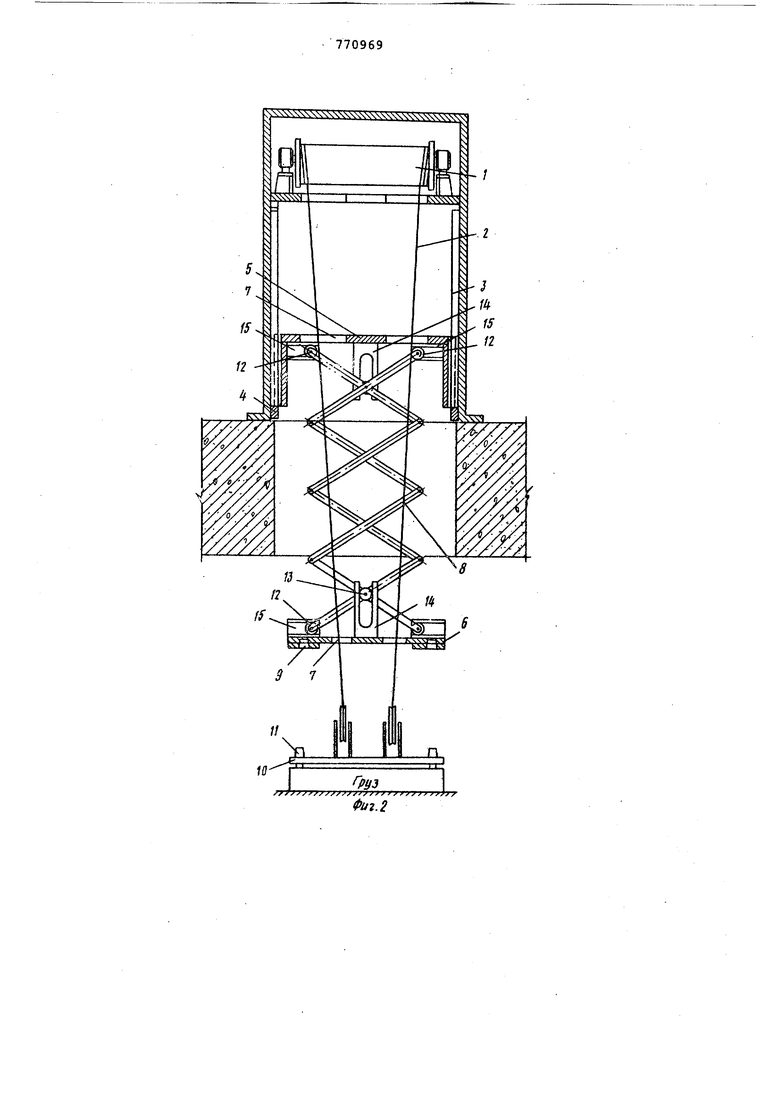
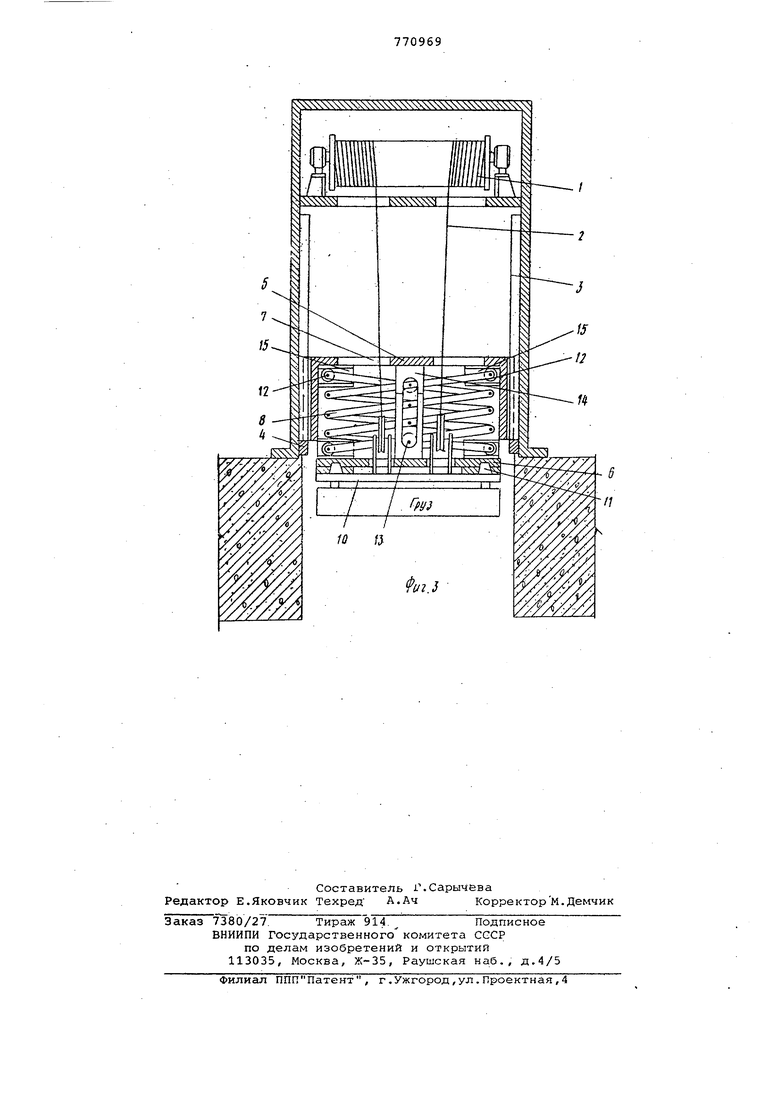
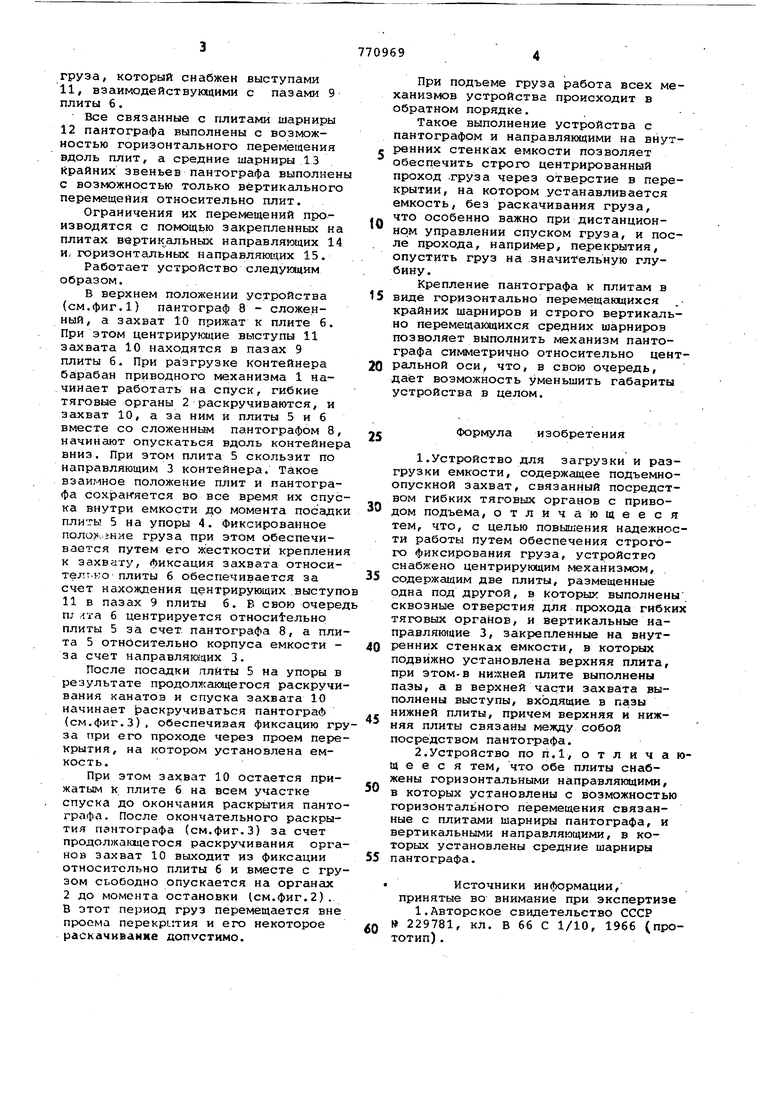
На фиг. 1 схематично изображено устройство для загрузки и разгрузки емкости;, на фиг. 2 - то же, в крз нем нижнем положении/ на фиг. 3 то же, в промежуточном положении. Загрузочно-разгрузочная система содержит приводной механизм 1, гибкие тяговые органы 2 и центрирующий механизм,включающий закрепленные на стенках емкости вертикальные направляющие 3 с упорами 4 в нижней части и две плиты 5 и 6, размещенные одна под другой,в которых выполнены сквозные отверстия 7 для прохода гибких тяговых органов 2, причем верхняя плита 5 выполнена с возможностью перемесчения по направляющим 3, плита 6 связана с верхней посредством пантографа 8 и выполнена с пазами 9. На тяговых органах 2 свободно подвешен захват 10 для
груза, который снабжен выступами 11, взаимодействующими с пазами 9 плиты 6.
Все связанные с плитами шарниры 12 пантографа выполнены с возможностью горизонтального перемещения вдоль плит, а средние шарниры 13 1 райних звеньев пантографа выполнены с возможностью только вертикального перемещения относительно плит.
Ограничения их перемещений производятся с помощью закрепленных на плитах вертикальных направлягацих 14 и, 1х5ризонтс1льных направляющих 15. Работает устройство следующим образом.
В верхнем положении устройства (см.фиг.1) пантограф 8 - сложенный, а захват 10 прижат к плите б. При этом центрирующие выступы 11 захвата 10 находятся в пазах 9 плиты б. При разгрузке контейнера барабан приводного механизма 1 начинает работать на спуск, гибкие тяговые органы 2 раскручиваются, и захват 10, а за ним и плиты 5 и 6 вместе со сложенным пантографом 8, начинбиот опускаться вдоль контейнера вниз. При этом плита 5 скользит по направляющим 3 контейнера. Такое взаимное положение плит и пантографа сох раняется во все их спуска внутри емкости до момента посадки плигы 5 на упоры 4. Фиксированное пoлo).iниe груза при этом обеспечивается путем его жесткости крепления к захвату, фиксация захвата относител-во плиты 6 обеспечивается за счет нахождения центрирующих выступо 11 в пазах 9 плиты б. В свою очеред ш ;-1та 6 центрируется относительно плиты 5 за счет пантографа 8, а плита 5 относительно корпуса емкости за счет направля ааих 3.
После поссщки плиты 5 на упоры в результате продолжакядегося раскручивания канатов и спуска захвата 10 начинает 1раскручиваться пантограф (см.фиг.3), о«5еспечизая фиксацию груза при его проходе через проем перекрытия, на котором установлена емкость.
При этом захват 10 остается прижатым к плите 6 на всем участке спуска до окончания раскрытия пантографа. После окончательного раскрытия пантографа (см.фиг.З) за счет продолжанадегося раскручивания органов захват 10 выходит из фиксации относительно плиты б и вместе с грузом свободно опускается на органах 2 до момента остановки (см.фиг.2). В этот период груз перемещается вне проема перекр1:тия и его некоторое раскачивание ДОПУСТИМО.
При подъеме груза работа всех механизмов устройства происходит в обратном порядке.
Такое выполнение устройства с пантографом и направляющими на внутренних стенках емкости позволяет обеспечить строго центрированный проход .груза через отверстие в перекрытии, на котором устанавливается емкость, без раскачивания груза.
что особенно важно при дистанционном управлении спуском груза, и после прохода, например, перекрытия, опустить груз на значительную глубину.
Крепление пантографа к плитам в
15 виде горизонтально перемещающихся крайних шарниров и строго вертикально перемещакяцихся средних шарниров позволяет выполнить механизм пантографа симметрично относительно цент20 ральной оси, что, в свою очередь, дает возможность уменьшить габариты устройства в целом.
Формула изобретения
1.Устройство для загрузки и разгрузки емкости, содержащее подъемноопускной захват, связанный посредством гибких тяговых органов с приводом подъема, отличающееся тем, что, с целью повышения надежности работы путем обеспечения строгого фиксирования груза, устройство снабжено центрирующим механизмом,
5 содержащим две плиты, размещенные одна под другой, в которых выполнены сквозные отверстия для прохода гибких тяговых органов, и вертикальные направляющие 3, закрепленные на внутренних стенках емкости, в которых подвижно установлена верхняя плита, при этом-в нижней плите выполнены пазы, а в верхней части захвата выполнены выступы, входящие в пазы нижней плиты, причем верхняя и нижняя плиты связаны между собой посредством пантографа.
2.Устройство по П.1, отличающееся тем, что обе плиты снабжены горизонтальными направляющими,
в которых установлены с возможностью горизонтального перемещения связанные с плитами шарниры пантографа, и вертикальными Направляющими, в которых установлены средние шарниры
5 пантографа.
« Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР Q 229781, кЛ. В 66 С 1/10, 1966 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Кран-штабелер | 1980 |
|
SU908740A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Накопительный конвейер штучных грузов | 1989 |
|
SU1676958A1 |
| Кран-штабелер | 1987 |
|
SU1504177A1 |
| Стеллаж для хранения штучныхгРузОВ | 1979 |
|
SU806554A1 |
| Захватное устройство для изделий с вертикальным отверстием | 1990 |
|
SU1782913A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Склад для хранения штучных грузов | 1981 |
|
SU1031850A1 |
| Устройство для транспортирования электровозов и вагонеток по шахтному вертикальному стволу | 1982 |
|
SU1076395A1 |