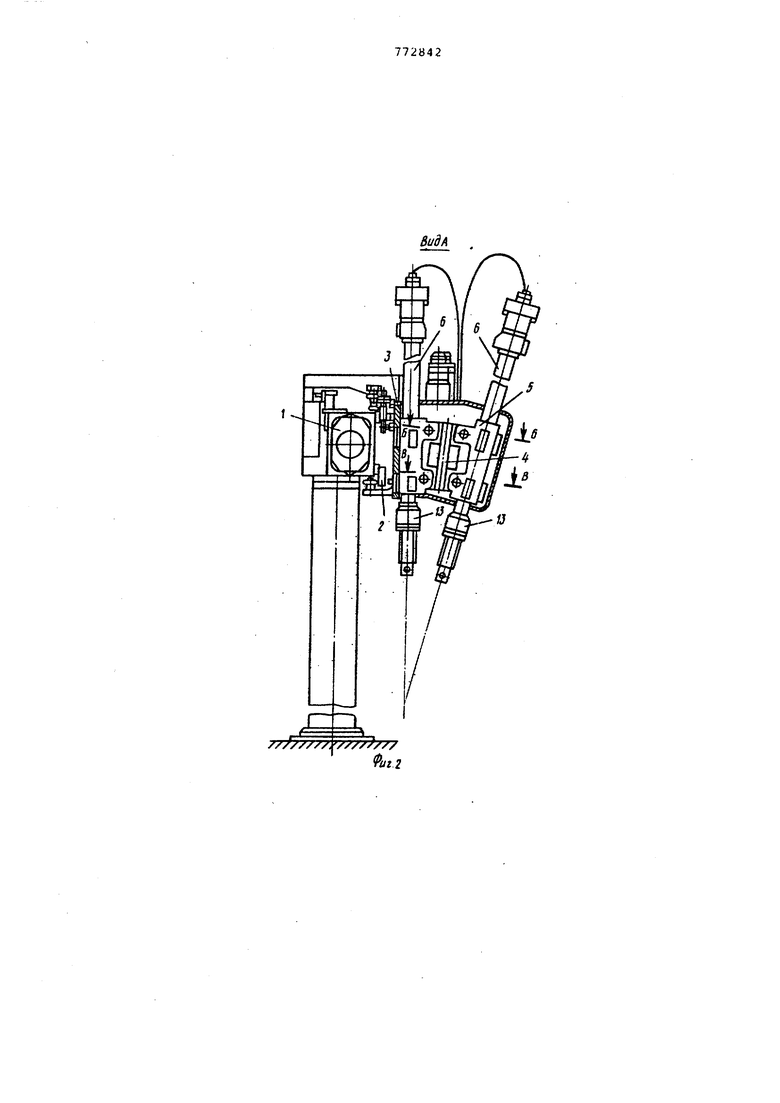
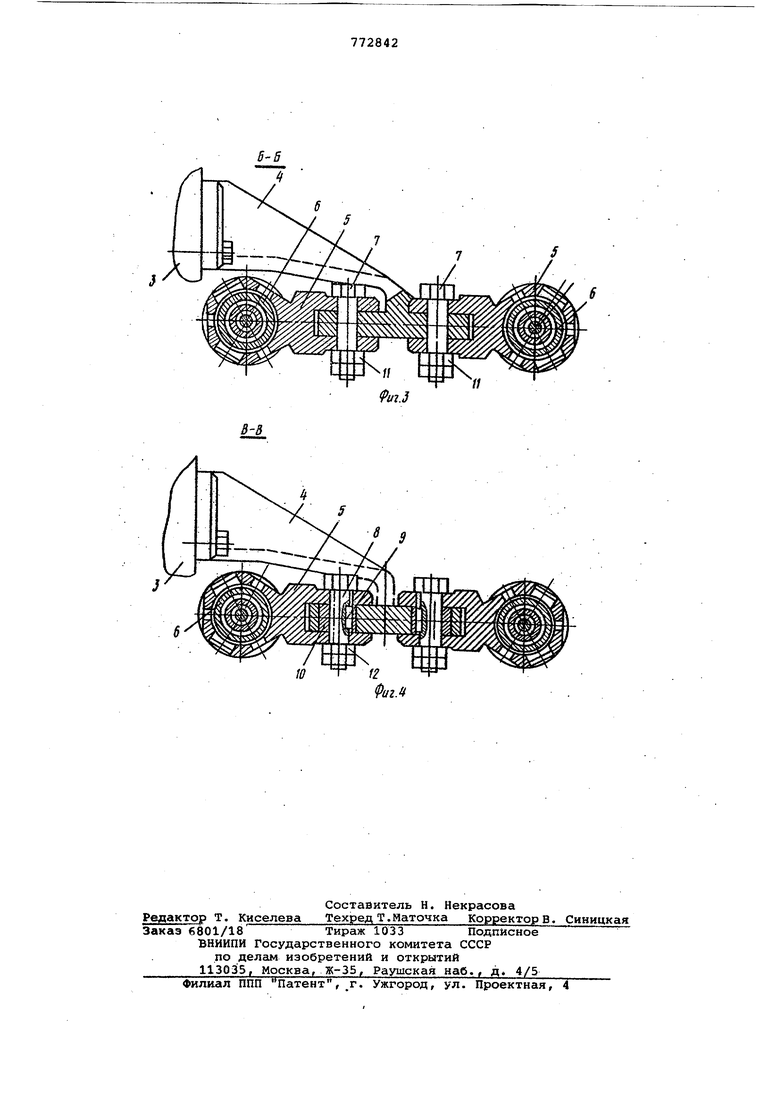
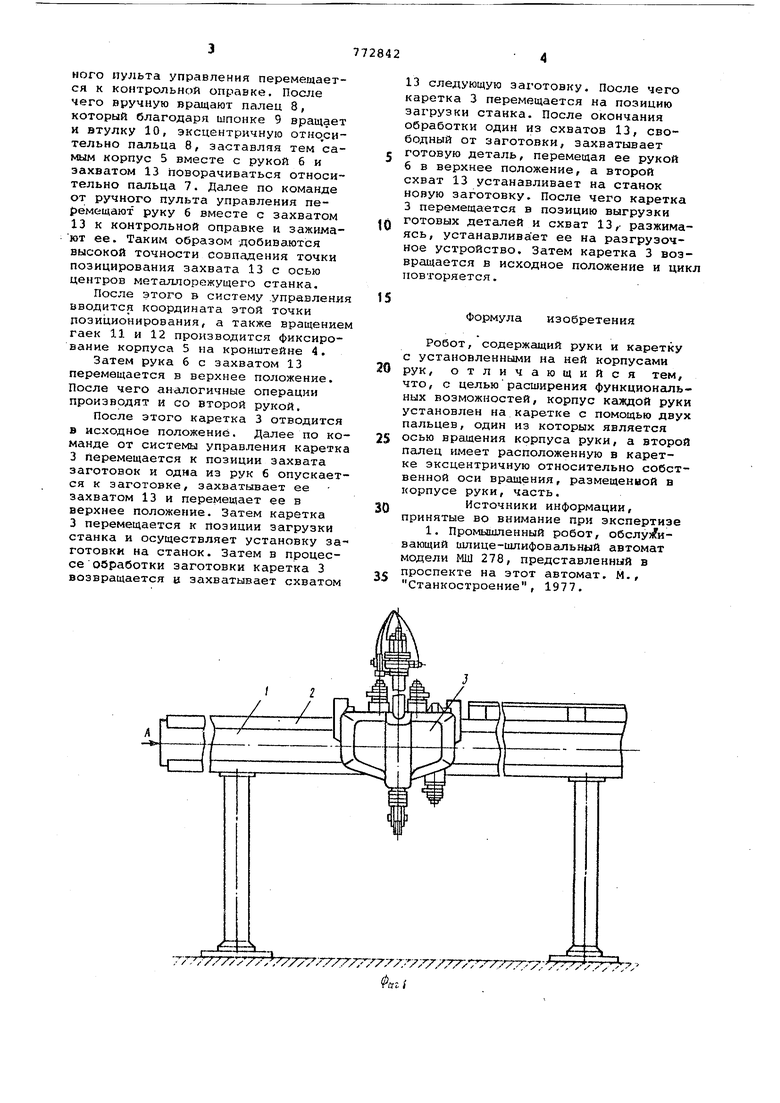
Изобретение относится к машинос ению и может быть испольэо1ёано для дачи, деталей к стайкам. Известен робот, содержсоций руки каретку с установленными на ней ко сами рук 1. Недостатком известного робота является сложность его применения для станков, отличающихся размерны ми характеристиками, из-за, отсутствия дополнительной степени свобод рук робота Цель изобретения расширение ф циональных возможностей робота за счет обеспечения дополнительной степени свободы рук. Цель достигается тем, что корпус каждой руки установлен на каретке с помощью двух пальцев, один из которых является осью вращения корпус руки, а второй палец имеет расположенную в каретке эксцентричную относительно собственной оси вращения, размещённой в корпусе руки, часть. На фиг. 1 изображен предлагаемый poбoт общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг..4 - разрез В-В на фиг. 2. Робот включает в себя транспортный путь 1, на котором закреплены направляющие 2 с установленной на них кареткой 3. На каретке 3 закреплен кронштейн 4, на котором установлены корпуса 5 каждой из рук 6 с возможностью поворота относительно пальца 7. Палец 8 связан посредством шпонки 9 с расположенной в продольном пазу кронштейна 4 втулкой 10, эксцентричной относительно его оси вращения, размещенной в корпусе 5. Корпуса 5 зафиксированы на кронштейне 4 с помощью гаек 11 и 12. На руках 6 установлены захваты 13. Перед работой робота нгшалсивают следующим образ сяч. При получении команды от ручного пульта управления каретка 3 от исходного положения перемещается вдоль направляющих 2 транспортного пути 1 в позицию загрузки метгшлорежущего станка (не показан), в центрах которого зажата контрольная оправка и производится раскрытие захвата 13. Затем корпус 5 руки б расфиксируется на кронштейне 4 отворачиванием гаек 11 и 12 пальцев 7 и 8 и рука 6 по команде от ручHoro пульта управления перемещается к контрольной оправке. После чего вручную вращают палец 8, который благодаря шпонке 9 вращает и втулку 10, эксцентричную от1юсительно пальца 8, заставляя тем самым корпус 5 вместе с рукой 6 и захватом 13 поворачиваться относительно пальца 7. Далее по команде от ручного пульта управления перемещают руку б вместе с захватом 13 к контрольной оправке и зажимаJOT ее. Таким образом добиваются высокой точности совпадения точки позицирования захвата 13 с осью центров металлорежущего станка.
После этого в систему .управлени вводится координата этой точки позиционирования, а также вращение гаек 11 и 12 производится фиксирование корпуса 5 на кронштейне 4.
Затем рука б с захватом 13 перемещается в верхнее положение. После чего аналогичные операции производят и со второй рукой.
После этого каретка 3 отводится в исходное положение. Далее по команде от системы управления каретк 3 перемещается к позиции захвата заготовок и одна из рук 6 опускается к заготовке, захватывает ее захватом 13 и перемещает ее в верхнее положение. Затем каретка 3 перемещается к позиции загрузки станка и осуществляет установку заготовки на станок. Затем в процессе Обработки заготовки каретка 3 возвращается ц захватывает схватом
13 следующую заготовку. После чего каретка 3 перемещается на позицию загрузки станка. После окончания обработки один из схватов 13, свободный от заготовки, захватывает готовую деталь, перемещая ее рукой 6 в верхнее положение, а второй схват 13 устанавливает на станок новую заготовку. После чего каретка 3 перемещается в позицию выгрузки готовых деталей и схват 13,- разжимаясь, устанавливает ее на разгрузочное устройство. Затем каретка 3 возвращается в исходное положение и цик повторяется.
Формула изобретения
Робот, содержащий руки и каретку с установленными на ней корпусами рук, отличающийся тем, что, с целью расширения функциональных возможностей, корпус каждой руки установлен на каретке с помощью двух пальцев, один из которых является осью вращения корпуса руки, а второй палец имеет расположенную в каретке эксцентричную относительно собственной оси вращения, размещенной в корпусе руки, часть.
Источники информации, принятые во внимание при экспертизе
1. Промышленный робот, обслуз ивающий шлице-шлифовальный автомат модели МШ 278, представленный в проспекте на этот автомат. М., Станкостроение, 1977.
77
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот | 1991 |
|
SU1781026A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Устройство для ротационного выдавливания | 1983 |
|
SU1100027A1 |
| Адаптивный схват промышленного робота | 1984 |
|
SU1202878A1 |
| Манипулятор плоскошлифовального станка | 1990 |
|
SU1764986A1 |