Изобретение относится к области машиностроения, в частности к системам управления машин для обработки давлением,5
Известно устройство точной установки деталей для правки, содержащее привод вра1чення детали с блоком управления, датчик угла поворота детали, подключенный к блоку управления,to с осью, соединенной с приводом вращения детали, блок памяти углов поворота , соединенный с датчиком угла поворота детали, блок сравнения углов поворота, выход которого под- и ключей к входу блока памяти углов поворота, а один вход подключен - к входу блока памяти углов, другой к выходу датчика угла поворота детали, блок сравнения величины кривив- 20 ны, соединенный с блоком памяти углов поворота, сумматор, соединенный с блоком сравнения величин кривизны, блок памяти величин кривизны, соединенный с сумматором, ком- 25 мутатор, соединенный dбпо амк памяти величин кривизны и сравнения величин кривизны, а также датчики кривизны, подключенные к коммутатору U).30
Известное устройство обладает недостаточной производительностью установки детали из-за необходимости вращения детали на два оборота для измерения ее кривизны.
С целью повышения производительности устройство снабжено блоками выбора сечения правки,памяти зкстремальных значений кривизны н определения направления вращения, при этом выход блока выбора сечения правки соединен с входом коммутатора и входом блока памяти величин кривизны, а вход подключен к выходу сумматора, выход блока памяти экстремальных величин кривизны подключен к входу блока выбора сечения правки, а вход - к выходу коммутатора, выход блока определения направления вращения соединен с входом блока управления приводом, а входы подключены: один к выходу сумматора, другой - к выходу блока памяти величин кривизны.
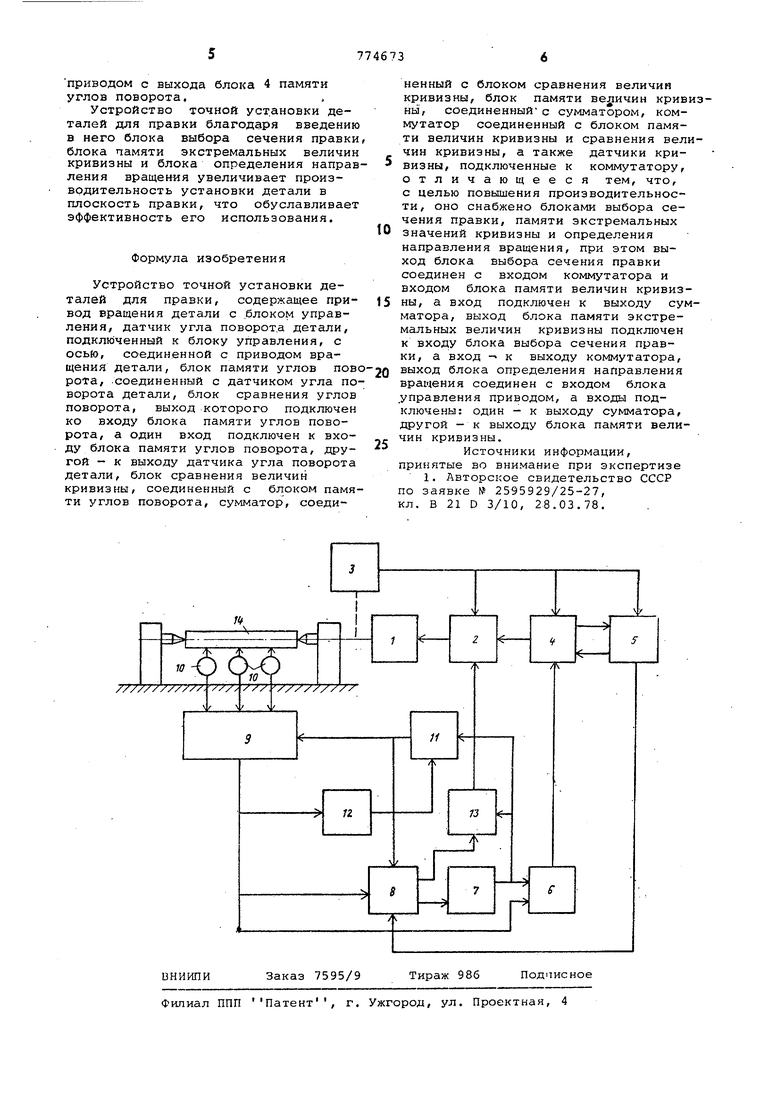
Блок-схема устройства точной установки деталей для правки представлена на чертеже.
Устройство содержит привод 1 вращения детали, блок 2 управления
приводом, датчик 3 угла поворота детали блок 4 памяти углов поворота, блок 5 сравнения углов поворота, блок б сравнения величин кривизны, сумматор 7, блок 8 памяти величин кривизны, коммутатор 9, датчики 10 кривизны, блок 11 выбора сечени.я правки, блок 12 памяти экстремальных величин кривизны и блок 13 определения направления вращения детали 14,
Устройство работает следующим образом.
Выправляемая деталь 14 зажимается в центрах, при этом датчики 10 кривизны измеряют величину расстояния от оси вращения детали до ее поверхности. На выходе коммутатора 9, постоянно осуществляющего опрос датчиков 10 кривизны, последовательно появляются величины, измеренные этими датчиками. Эти величины запоминаются блоком 8 памяти величин кривизны.
Блок 4 памяти углов поворота подает на вход блока 2 управления приводом и вход блока 5 сравнения углов поворота величину, соответствующую повороту детали на 90, Привод 1 вращает деталь, при этом блок 5 сравнивает величину угла поворота детали, поступающую на его вход с выхода датчика 3 угла поворота детали, с заданной блоком 4 величиной угла поворота. Когда деталь поворачивается на 90 ,блок 8 памяти величин кривизны по сигналу с блока 5 сравнения углов поворота,запоминает вторые показания датчиков 10 кривизны,Одновременно блок 4 памяти углов поворота по сигналу с блока 5 сравнения углов поворота увеличивает на 90 заданную величину угла поворота детали. Когда деталь порорачивается на 180, блок 8 памяти величин кривизны запоминает третьи показания датчиков 10 кривизны,
В интервале угла поворота детали на 180 блок 12 памяти экстремальных величин кривизны выбирает и запоминает наибольшую и наименьшую величины, измеренные каждым датчиком .10 кривизны.
Блок 8 памяти величин кривизны подает на вход сумматора 7 две величины показания первого датчика 10 кривизны, полученные до вращения детали и после ее поворота на 180. Одновременно блок 12 памяти экстремальных величин кривизны подает на вход блока 11 выбора сечения правки наибольшую и наименьшую вели ины, измеренные первым датчиком 10 криви 3 НЫ .
Сумматор 7 вычисляет полусумму двух заданных величин и результат суммирования, представляющий собой величину истинного радиуса детали
подает на вход блока 11 выбора сечения правки.
Блок 11 вычисляет и запоминает величину кривизны детали, измеренную первым датчиком 10, как наибольшее из модулей разности наименьшего показания первого датчика 10 кривизны и истинного, радиуса детали и наибольшего показания первого датчика 10 кривизны и-истинного радиуса детали. Аналогично блок 11 выбора сечения правки вычисляет и запоминает величины кривизны детали, измеренные всеми датчиками 10 кривизны, при этом блок 8 памяти величин кривизны и блок 12 памяти экстремальных величин кривизны выдают величины, измеренные соответствующими датчиками 10 кривизны.
Блок 11 выбора сечения правки выбирает датчик 10, показавший наибольшую величину кривизны детали, и выдает сигнал коммутатору 9 на подключение этого датчика к входу блока б сравнения величин кривизны. Одновременно блок 8 памяти величин кривизны подает на вход сумматора 7 две величины показания выбранного датчика 10 кривизны, полученные до враще-ния детали и после ее поворота на ISO, а на вход блока 13 определения направления вращения - вели- . чины показаний этого датчика 10 KpiTвизны после поворота детали на 90° и 180°.
Блок 13 задает блоку 2 управления приводом направление вращения детали в ту же сторону,если величина истиннго радиуса детали,вычисленная сумматором 7, больше или меньше величин, подаваемых с выхода блока 8 памяти величин кривизны на вход блока 13 определения направления вращения,, и в обратную сторону, если величина истинного радиуса детали находится между этими двумя величинами.
По сигналу с блока б сравнения величин кривизны, определяющего момент установки детали кривизной в плоскость, перпендикулярную к плоскости правки, когда величина с выхода выбранного датчика 10 кр 1визны равна величине истинного радиуса детали, блок 4 памяти углов поворота запоминает показание датчика 3 угла поворота детали и задает поворот детали на 90 в ту же сторону вращения, если показание датчика 10 кривизны уменьшилось, и в обратную сторону, если показание этого датчика увеличилось. Увеличение или уменьшение показаний датчика 10 крвизны определяется блоком 6 сравнени величин кривизны.
Деталь устанавливается кривизной вверх в плоскость правки, когда величина с рыхода датчика 3 угла поворота детали равна величине, подаваемой ла вход блока 2 управлени
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство точной установки деталей для правки | 1978 |
|
SU719744A1 |
| Устройство точной установки детали для правки | 1977 |
|
SU662191A1 |
| Устройство точной установки детали для правки | 1977 |
|
SU725741A1 |
| Система управления агрегатом правки цилиндрических изделий | 1981 |
|
SU1074621A1 |
| Система управления правильным прессом | 1979 |
|
SU852405A1 |
| Устройство для правки трубных заготовок | 1989 |
|
SU1648587A1 |
| Устройство для правки деталей | 1979 |
|
SU804071A1 |
| Система управления правильным прессом | 1980 |
|
SU946719A1 |
| Система управления гидроагрегатом правки цилиндрических заготовок | 1981 |
|
SU1009555A1 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
