I
Изобретение относится к автоматическим загрузочно-разгрузочным устройствам и может быть использовано в различных отраслях техники, например в литейном производстве.
Известно устройство с перемещающейся по монорельсу кареткой, несущей две выдвигающиеся руки 1.
Это устройство не решает задачи снятия изделий, жестко зафиксированных на транспортере, движущемся с переменной ckopocтью.
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее корпус, смонтирбванные на каретках механические руки с механизмами захвата и механизм подъема этих рук 2}. В известном устройстве имеется синхронизирующая система способная обеспечить снятие изделий с транспортного средства, движущегося только с постояиной скоростью Согласованность движения трансйортйого средства и механизма захвата механической руки достигается посредством заранее записанных на перфоленту команд. Такая синхронизация предполагает известную и не Меняющуюся неожиданно в процессе работы
скорость транспортного средства и работу устройства от команд электронных управляющих систем.
В некоторых производствах, например в литейном, подающий отливки транспортер имеет непостоянную скорость. Скорость транспортера подчиняется ритму работы станка. Она меняется в зависимости от состояния отливок, качества абразивных кругов, времени суток и других футоров. Постоянно случаются остановки и ход назад при непра10 вильиой установке отливок, а также по желанию оператора станка и т.д. При изменений скорости устройству необходимо менять программу, а в положении «Стоп и при ходе назад транспортера устройство необходимо снабжать сложным следящим ройством и миникомпьютором. Поэтому известное устройство не может быть использовано в таком производстве, в котором транспортное средство движется с непостоянной скоростью, что снижает его технологические возможности.
20
Цель изобретения - механизация процес са съема изделий с транспортного средства, движущегося с переменной скоростью, что
расширяет технологические возможности устройства.
Указанная цель достигается Тем, что устройство снабжено установленными с возможностью осевого перемещения в корпусе горизонтальными направляющими колоннами, на которых смонтированы механизмы захвата, а каждая механическая рука снабжена механизмом выравнивания скорости, выполненным в виде силового цилиндра, связанного с механизмом захвата.
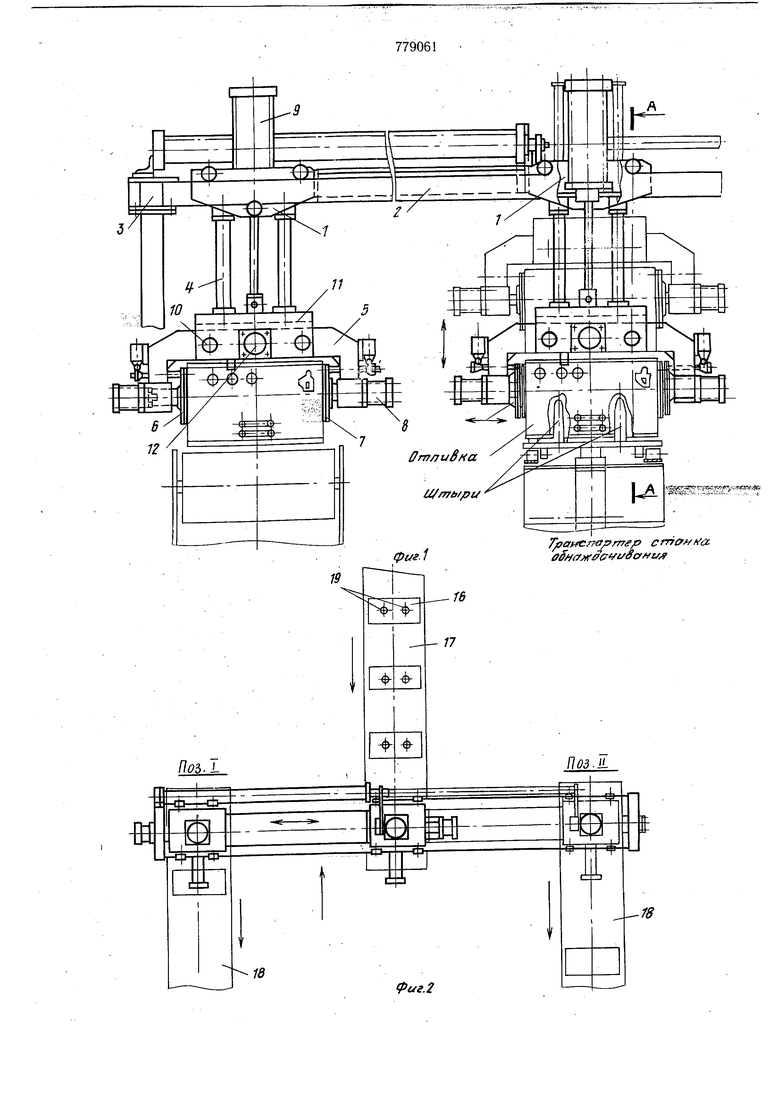
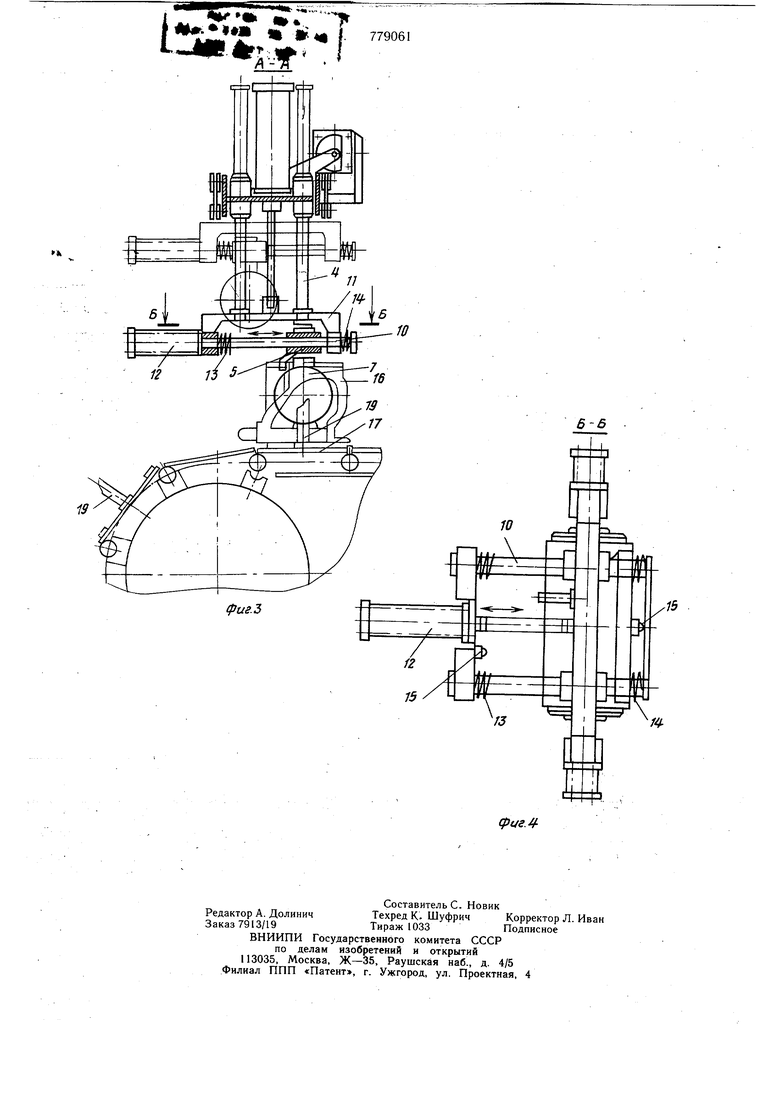
На фиг. I представлено устройство, общий вид; нафиг. 2 - то же, с транспортерами в плане; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 3.-; - ; Устройство для снятия изделий содержит каретки 1, которые перемещаются по рельсам 2 рамы 3. На каждой каретке размещена механическая рука 4, состоящая из захвата 5 с обрезиненными лацами 6 и 7 и с силовьши цилиндрами 8 привода каждой лапы,и имеющая механизм 9 подъема захвата.- . .
В захвате 5 установлены горизонтальные направляющие колонны 10, на которых подвижно с.монтирован корпус 11 механизма выравнивания Скорости, вьшолненного в виде силового цилиндра 12. и амортизаторов 13 и 14, расположенны.х на колоннах 10. Конечные выключатели 15 предназначены для переключении устройства.. .
Устройство работает следующим образом.
Рассмотрим работу устройства применительно к случаю снятия, переноса и установки с возможностью поворота отливок блоков цилиндров двигателя автомобиля «Жигули с транспортного средства станка обработки торцов на приемные транспортеры.
Отливка 16 блока цилиндров, установленная жестко на щтырях 19 транспортного средства 17, движущёгося с переменной скоростью, проходит между разведенными лапами 6 и 7. При этом срабатывает конечный выключатель и подает сигнал на захват отливки.
С помощью цилиндров 8 отливка захватываетСя лапами 6 и 7. В конце процесса захвата конечным выключателем подается сигнал на подъем отливки. Отливка снимается со щтырей 19 транспортера.Нр с момента захвата отливки до момента , когда она полностью снята со щтырей, проходит некоторое время, за которое отливка 16 соверщит некоторый путь. Для компенсации этого при нормальной безаварийной работе устройства служит механизм выравнивания скорости. Механизм выравнивания скорости, которым снабжена каждая механическая рука устройства, работает следующим образом. Отливка 16, уже захваченная Лапами, но жестко соединена с транспортером, двигает вперед захват 5, который скользит по горизонтальным направляюицим колоннам 10 до тех пор, пока отливка неполностью снята со штырей транспортера, т.е. не потеряет с ним сгвязь.
После подъема отливки захват 5 занимает на колоннах 10 не фиксированное положение. Для того, чтобы продолжить цикл .
работы, Цилиндр 12 возвращает захват 5 в исходное положение и удерживает его так до момента готовности принять новую отливку. При этом цилиндр 12 втягивает шток, освобождая место для скольжения захвату 5.
После подъема отливки обе каретки, соединенные рамкой (на фиг: не показана), передвигаются с помощью силового цилиндра вправо на шаг (поз II). Здесь отливка опускается и сбрасывается на приемный транспортер 18. При этом возможен поворот отливки. В это время вторая каретка со своей механической рукой с позиции 1 переходит на позицию захвата очередной отливки, захватывает ее, снимает со штырей 19, поднимает и переносит ее внобь на по0 зицию 1. Цикл повторяется.
Отливки снимаются, поднимаются вверх, переносятся на позиции разгрузки, опускаются и сбрасываются на транспортеры 18 каждой кареткой поочередно.
Механизм выравнивания скорости предохраняет устройство от аварии. В том случае, если отливка захвачена захватом 5, но не сработает механизм 9 подъема, захват 5, двигаясь по направляющим колоннам 10, преодолевает усилие амортизаторов 13, нажимает конечный выключатель 15 и останавливает транспортное средство 17.
В том случае, если захват 5 «заест на направляющих колонах 10, двигаясь вместе с ними , он преодолевает усилие амортизаторов 14, нажимает на конечный выключатель 15 и останавливает транспортное средство 17. Тонкой линией показано устройство в момент снятия изделия со штыря 19.
Формула изобретения Устройство для снятия изделий с транспортного средства, содержащее смонтированные на каретках механические руки с захватами и механизм подъема, отличающееся тем, что, с целью расширения технологических возможностей за счет снятия изделий с транспортера, движущегося с переменной скоростью, оно снабжено установленными с возможностью осевого перемещения в захвате механической руки направляющими колоннами и установленными с возможностью перемещения по этим колоннам корпусами, а каждая механическая рука
снабжена механизмом выравнивания скорости, выполненным в виде силового цилиндра, связанного с корпусом, и амортизаторов, расположеннь1х на колонах.
Источники информации,
5 принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 453292, кл. В 25 J 5/02, 26.10.72.
2.Патент США № 3575301, кл. 214-1 20.04.71.
«-ЛШ.
779061 
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия кокильного литья | 1982 |
|
SU1061922A1 |
| Автоматическая линия кокильного литья | 1966 |
|
SU270202A1 |
| Перегрузочное устройство для изде-лий | 1979 |
|
SU816897A1 |
| Устройство для подачи пялец к стегальной машине | 1979 |
|
SU1028749A1 |
| Машина для литья под электромагнитным давлением | 1978 |
|
SU701004A1 |
| Захватное устройство для длинномерных грузов | 1982 |
|
SU1094833A2 |
| Кран-манипулятор | 1983 |
|
SU1150214A1 |
| Установка для извлечения отливок из разъемных форм центробежнолитейных машин | 1981 |
|
SU1014642A1 |
| Установка для выбивки стержней из отливок | 1983 |
|
SU1126368A1 |
| Стан для раскатки лезвий стрельчатых лап культиватора | 1981 |
|
SU1084101A1 |