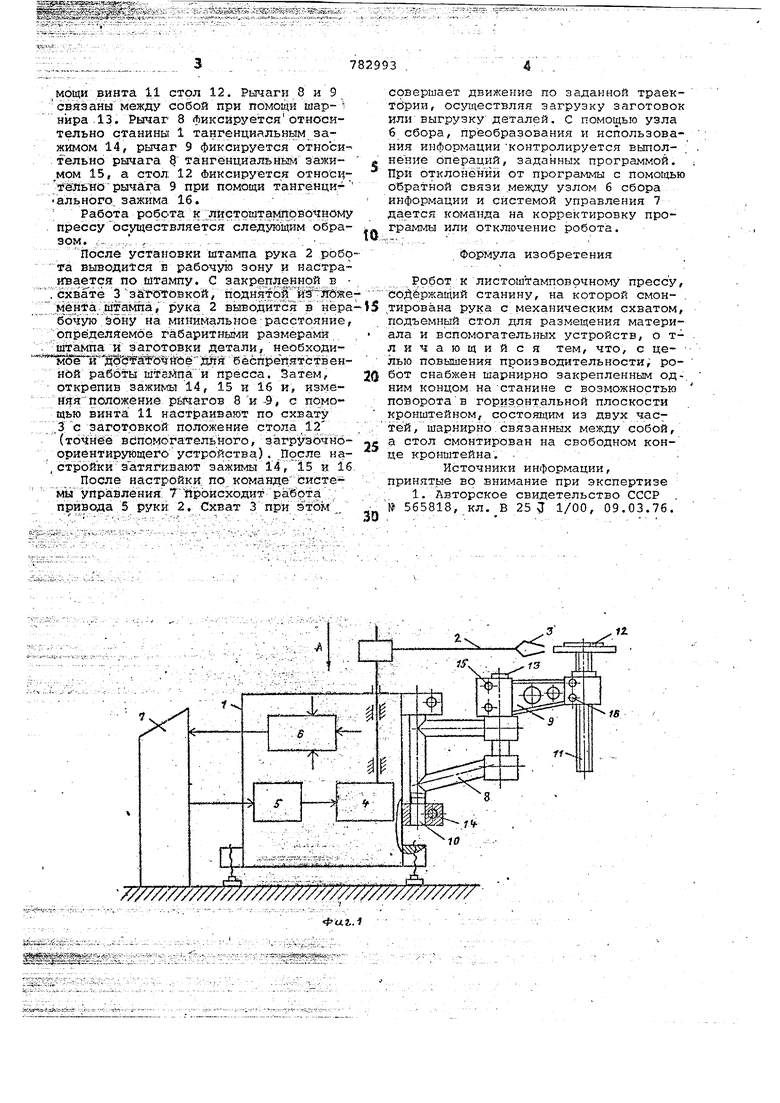
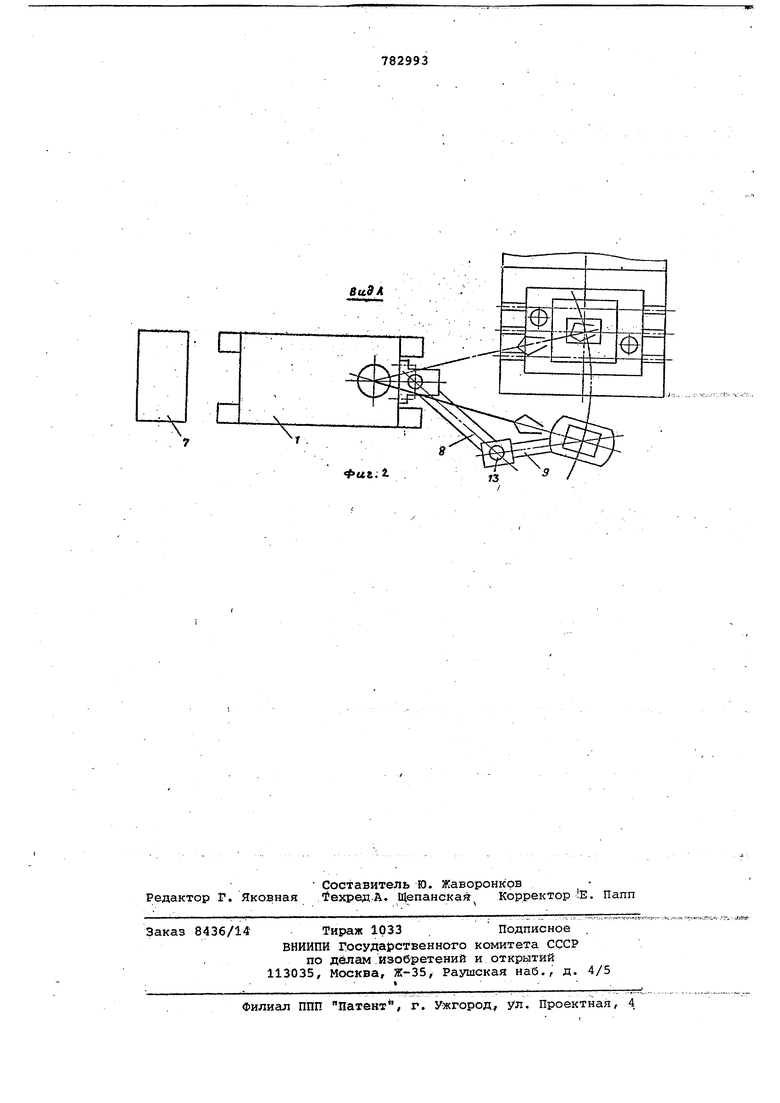
Изобретение относится к области обработки металлов давлением, в частности к устройствам для подачи в штам пы штучных листовых заготовок и удаления изштампа отштампованикк деталей, и отходов. Известен робот к лйстоштампрвочному прессу, содержащий станину, на которой,смонтирована рука с механическим СКВатом, подъемный стол для размещения материала в вспомогательных устройств 1. Недостатком известного робота явяяется низкая производительность, яв ляющаяся следствием больших простоев при настройке его взаимодействия со вспомогательными устройствами, тикими, например, как ориентирующие загр зочные устройства, питатели и т. п. В серийром и мелкосерийном производствах производить подобные перестрой ки приходится несколько раз в смену. Вспомогательные устройства при этом требуют выверки по координатам и высоте относительно робота и штампа;с целью сведения к минимуму траектории движения руки робота. Величина траек тории зависит от габаритных размеров детали и штампа. Целью иэобретения является повышение производительности работы робота. Поставленная цель достигается тем, 4to робот снабжен шарнирно закрепленным одним концом на станине с возможностью поворота в горизонталь-ной плоекбеггй ; крбнштейном, состоящим из двух частей, шарнирно связанных между собой, .а стол смонтирован на свободном конце кронштейна. На фиг. 1 изображен робот , общий вид на фиг. 2 - вид ло стрелке А на фиг. 1. Робот к листоштамповочному прессу содержит станину 1, на кот6р6й смбнтирована рука 2 с механизмом схвата 3, механизм преобразования и передачи энергии 4, прив,оД 5 руки 2, узел б сбора, преобразования и использования информации. Привод 5 и узел 6 фуН кционально взаимосвязаны с системой управления 7. На одной из стенок стаНИНЫ 1 шарнирнозакреплен кронштейн состоящий из двух рычагов 8 и 9. Один конец кронштейна установлен на станине 1 при помощи оси 10, а на Другом его конце смонтирован при винта 11 стол 12. Рычаги 8 и 9 связанымежду собой при помощи шарнира .13. Рычаг 8 фиксируетсяотносительно станинк 1 тангенциальным зажимом 14, рычаг 9 фиксируется относительно рычага Q тангенциальным зажи мом 15, а стол 12 Фиксируется относ Шйб норычага 9 при помощи тангенци ального, зажима 16. . ; Работа робота к злйстошташовочному . прессу осуществляется елелующим образом. ;.. . .., -,.-- .-..-. - ..
Пс5сле установки штампа рука 2 робота выводи ся в рабочую зону и настраитвается по шта,мпу. С закрепленной в 7схвал ё 3 зсйге овкой / поднетШ1|т ; ШнФa.uirajsma, рука 2 выводится в нёрабочую минимальное;расстояние, определяемое габаритными размерами .Штампа и заготовки детали, необхови 15o rttfЬ Г№Чййе дай
нЬй раббты пресса. Затем,
открепив .зажимы14, 15 и 16 и, измеигяяположение рьйагов 8 и-9, с помощью винта 11 настраивает по схвату ,3с заготовкой положение стола 12
( вспомогательного, загрузбчнбориентирутощегоустройства) . После надстройки эатягивают зажимы 14,15 и 16,
После настройки, по команде систе; мы управления 7йроисходит раёрта.. привода.5 руки 2, Схват 3при этом
782993
совершает движение по заданной траектории, осуществляя загрузку заготовок или выгрузку деталей, с noMouibio узла 6 сбора, преобразования и использования информации контролируется выполнение операций, заданных программой. При Отклонений от программы с помощью обратной связи .между узлом б сбора информации и системой управления 7 дается команда на корректировку программы или отклгоченис робота.
Формула изобретения
Робот к листоштамповочному прессу,
еойёржащий станину, на которой смон}5 тирована рука с механическим охватом, подъемный стол для размещения материала и вспомогательных устройств, о тличающийся тем, что, с це- лью повышения производительности; робот снабжен шарнирно закрепленным од-, ним концом, на станине с возможностью
. поворотав горизонтальной плоскости кронштейном, состоящим из двух час.. тёй, шарнирно .связанных между собой,
jg а стол смонтирован на свободном конце кронштейна. .:
Источники информации, принятые во внимание при экспертизе
:, 1. Авторское свидетельство СССР
№ 565818, кл.В 25 J 1/00, 09.03.76.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1981 |
|
SU990502A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Робот к листоштамповочному прессу | 1980 |
|
SU880580A1 |
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
| Промышленный робот | 1985 |
|
SU1268254A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
,
8 ид А
Фиг. 2.
