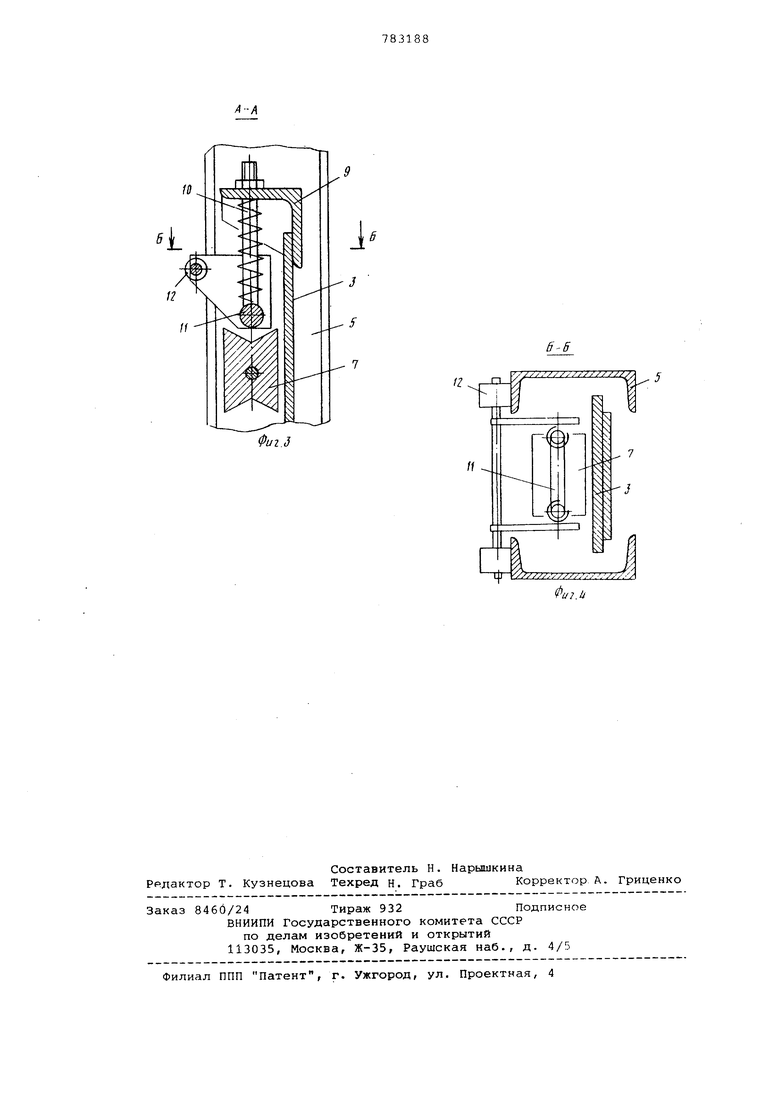
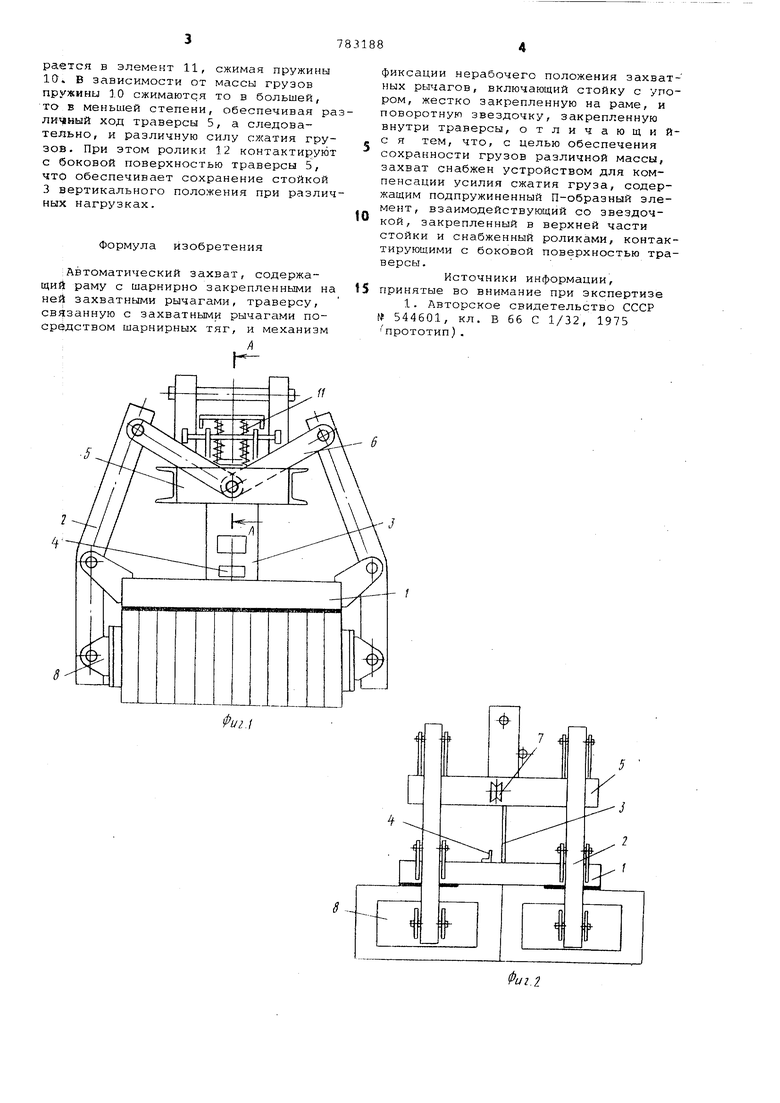
(54) АВТОМАТИЧЕСКИЙ ЗАХВАТ Изобретение относится к подъемнотранспортному оборудованию. Известен автоматический захват, содержащий раму с шарнирно закреплен ными на ней захватньоми рычагами, тра версу, связанную с захватными рычага ми посредством шарнирных тяг, и механизм фиксации нерабочего положения захватных рычагов, включающий стойку с упором, жестко закрепленную на раме, и поворотную звездочку, закрепленную внутри траверсы Недостатком известного автоматического захвата является невозможность сохранности грузов различной массы. Целью изобретения является обеспе чение сохранности грузов различной массы. . Цель достигается тем, что захват снабжен устройством для компенсации усилия сжатия груза, содержащим подпружиненный П-образный элемент, взаимодействующий со звездочкой,закрепленный в верхней части стойки и снабженный роликами, контактируиадим с боковой поверхностью траверсы. На фиг. 1 показан предлагаемый а томатический захват, общий вид; на фиг. 2 - то же, вид сбоку на фиг.З сечение А-А на фиг. 1, на фиг. 4 сечение Б-Б на фиг. 3. Захват содержит раму 1, шарнирно закрепленные на ней рычаги 2 и жестко закрепленную стойку 3 с упором 4 в нижней части. На стойке 3 с возможностью перемещения установлена траверса 5, связанная посредством шарнирных тяг 6 с рычагами 2. внутри траверсы 5 закреплена поворотная звездочка 7, а на свободных концах рычагов 2 шарнирно закреплены прижимы В. В верхней части рамы 1 на кронштей не 9 установлен подпружиненный пружинами 10 П-образный элемент 11, снабженный роликами 12. Захват работает следующим образом. При опускании захвата на груз рычаги 2 раскрыты и зафиксированы в нерабочем положении звездочкой 1 траверсы 5, взаимодействующей с упором 4 стойки 3, на которой установлена траверса 5.При упоре рамы 1 в поверяность груза, траверсу 5 опускают, звездочка 7 выходит из зацепления с упором 4. Захват готов к подъему груза. При движении освобожденной тра.версы 5 вверх рычаги 2 прижимами 8 захватывают груз, а звездочка 7 упирается в элемент 11, сжимая пружины 10. Б зависимости от массы грузов пружины 10 сжимаются то в большей, то в меньшей степени, обеспечивая различный ход траверсы 5, а следовательно, и различную силу сжатия грузов. При этом ролики 12 контактируют с боковой поверхностью траверсы 5, что обеспечивает сохранение стойкой 3 вертикального положения при различных нагрузках.
Формула изобретения
Автоматический захват, содержащий раму с шарвирно закрепленными на ней захватными рычагами, траверсу, связанную с захватными рычагами посредством шарнирных тяг, и механизм
фиксации нерабочего положения захватных рычагов, включающий стойку с упором, жестко закрепленную на раме, и поворотную звездочку, закрепленную внутри траверсы, отличающийс я тем, что, с целью обеспечения сохраЕшости грузов различной массы, захват снабжен устройством для компенсации усилия сжатия груза, содержащим подпружиненный П-образный элемент, взаимодействующий со звездочкой, закрепленный в верхней части стойки и снабженный роликами, контактирующими с боковой поверхностью траверсы.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 544601, кл. В 66 С 1/32, 1975 прототип).
Фиг.З
бВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват | 1960 |
|
SU138721A1 |
| Клещевой захват | 1977 |
|
SU703467A1 |
| Захватное устройство для контей-HEPOB | 1979 |
|
SU816932A1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Захватное устройство для длинномерных изделий | 1988 |
|
SU1731718A1 |
| Вертикальный накопитель | 1989 |
|
SU1698148A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Грузозахватное устройство | 1985 |
|
SU1324983A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |