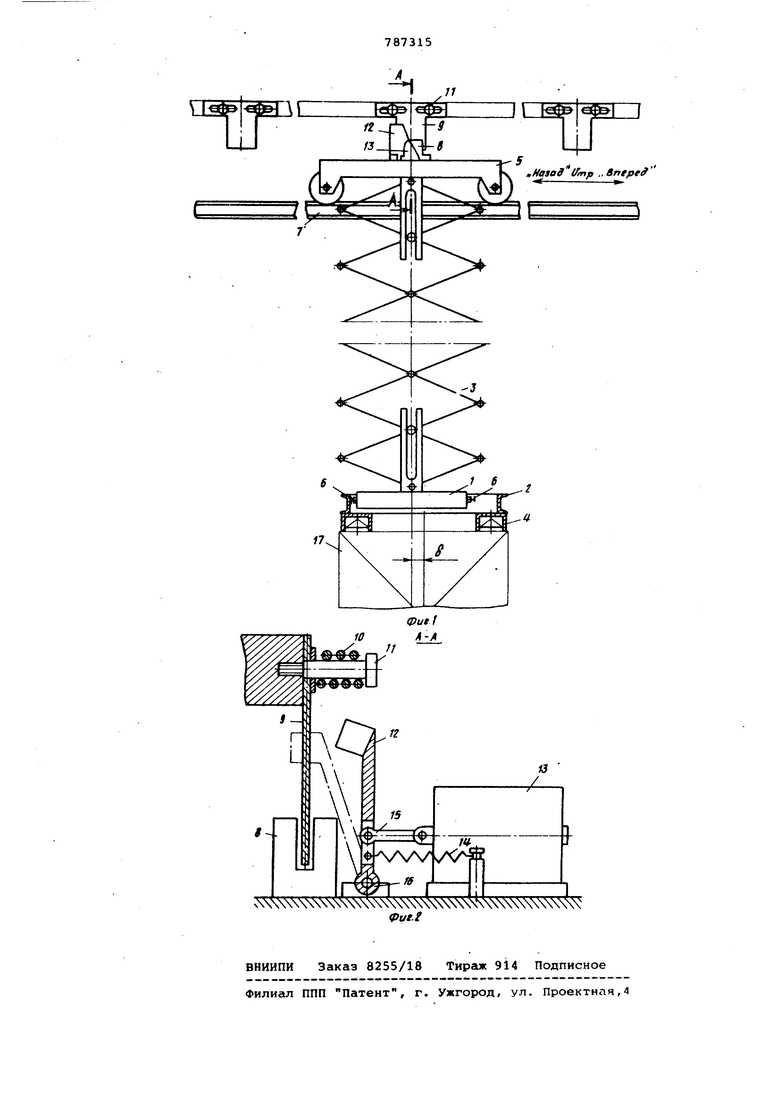
Изобретение относится к подъемнотранспортным устройствам, используемы для выполнения погрузочно-разгрузочных работ с контейнерами, приспособленными под верхний захват. Известна грузовая каретка крановштабелеров для склада, оборудованного путевыми датчиками с сигнальными пластинами, содержащая транспортную тележку с приводом передвижения, захватную платформу,включающую жесткую и захватную рамы 1. Недостатком известной конструкции является невысокая точность штабели.рования грузов. Цель изобретения - повышение точн сти штабелирования грузов. Поставленная цель достигается тем что грузовая каретка кранов-штабелеров снабжена корректирующим устройст вом, выполненным в виде управляющей вилки, шарнирно закрепленной на тран портной тележке с возможностью повор та посредством электромагнита и возвратисй пружины и взаимодействующей с сигнальными пластинами датчиков, а на жесткой раме платформы закреплены конечные выключатели,взаимодействующ с захватной рамой и соединенные с электромагнитом и приводом передвиже ния транспортной тележки. На фиг. 1 схематически изображена грузовая каретка кранов-штабелеров, общий вид; на фиг. 2 - сечение А-А на фиг. 1. .Грузовая каретка кранов-штабелеров содержит захватную платформу, включающую жесткую раму 1, на которую опирается с возможностью горизонтального смещения захватная рама 2. Рама 1 снабжена узлами крепления с колонной 3, а рама 2, имеющая ориентирующие гнездовые втулки 4 и захватные крюки, подвешена на канате тросового грузоподъемника, установленного на транспортной тележке 5. На раме 1 неподвижно установлены конечные выключатели 6 нажимного действия, а на раме 2 - упорные площадки, взаимодействующие с выключателями 6 при предельном смещении рам платформы относительно друг друга. На тележке 5, передвигающейся по рельсовь « путям или мосту крана по направляющим .7, находится чувствительный элемент 8 бесконтактного датчика путевых перемещений индукционного типа (например КВД-3-24), а на неподвижных стационарных конструкциях складе закреплены сигнальные пластины 9. Каждая из пластин 9 установлена строго по вертикальной оси ячейки штабеля с возможностью смещения в направлениях рабочих перемещений тележки 5/ для чего пластины снабжены пааами и прижаты к опорной поверхности пружинами 10, размещенными на крепежных болтах 11. С элементом 8 датчика совмещено корректирующее устройство, которое содержит управляющую вилку 12, электро магнит 13 толкающего действия, пружину 14. Вилка 12 зафиксиров/1на в исходном положении, сохраняемой в процессе всех транспортных передвижений тележки-5, пружиной 14 и шарнирАо связана с яко рем электромагнита 13 тягой 15 Управляющая вилка 12 имеет в нижней части горизонтальную ось 1б вращения, а в верхней - два зуба, расстояние между которыми равно ширине пластины 9. При опускании захватной платформы на контейнер 17, установленный с предельным отклонением ff от номинального положения, заданного расположением пластины 9, рама 2 получает горизонтальное смещение относительно рамы 1, при этом электромагнит 13, толкая яко и связанную с ним тягу 15, переводит вилку 12 в рабочее положение. При этом зубцы бтопорной вилки 12 захватывают пластину 9 и перемещают ее вместе с тележкой 5. Тележка 5, передвигаясь на малой скорости, переносит колонну 3 ц раму 1 в центральное положение относительно неподвижной в это время рамы 2, а пластину 9 - в новое положение, соо ветствующее вертикальной оси контейне ра 17. Как только предельное смещение рам захватной платформы,ликвидируется привод тележки 5 отключается и на ходовые колеса накладываются тормоза. Одновременно пружина 14 переводит вил ку 12 в исходное положение, освобожда пластину 9. Дальнейшие рабочие передвижения .захватной платформы осуществляются согласно основному технологическому циклу, программа которого заложена в схеме автоматического управления краном-штабелером. Осуществление корректировки положения путевых датчиков при смещении контейнера в противоположном направлении происходит аналогично описанному. Корректировка положения путевых датчиков по контейнеру, имекхаему смещение от номинального положения, позволяет при многоярусном штабелировании обеспечить вертикальную связку контейнеров в штабеле и более полно использовать полезную емкость каждой ячейки штабеля. Формула изобретения Грузовая каретка кранов-штабелеров для склада, оборудованного путевыми датчиками с сигнальными пластинами, содержащая транспортную тележку с приводом передвижения, захватную платформу, включающую жёсткую и захватную рамы, отличающаяся тем, что, с целью повышения точности штабелирования грузов, она снабжена корректирующим устройством, выполненным в виде управляющей вилки, шарнирно закрепленной на транспортной тележке с возможностью поворота посредством электромагнита и возвратной пружины и взаимодействующей с сигнальными пластинами датчиков, а на жесткой раме платформы закреплены конечные выключатели, взаимодействующие с захватной рамой и соединенные с электромагнитом и приводом передвижения транспортной тележки. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельстЬо СССР № 554197, кл. В 65 G 65/02, 21.11.74.

| название | год | авторы | номер документа |
|---|---|---|---|
| Тележка крана-штабелера | 1975 |
|
SU523545A1 |
| Линия погрузки стеклотары в контейнер | 1989 |
|
SU1742175A1 |
| Кран-штабелер | 1983 |
|
SU1164157A1 |
| Склад штучных грузов | 1975 |
|
SU818968A1 |
| Кран-штабелер для загрузки иРАзгРузКи КОНТЕйНЕРОВ | 1978 |
|
SU819016A1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| Кран-штабелер | 1968 |
|
SU718342A2 |
| Устройство для ориентации передаточной тележки стеллажного крана-штабелера относительно межстеллажного прохода | 1989 |
|
SU1705197A1 |
| ТРАНСПОРТНАЯ СИСТЕМА СКЛАДА ВЫСОКОПЛОТНОГО ЯРУСНОГО ХРАНЕНИЯ ГРУЗА НА ПОДДОНАХ | 2006 |
|
RU2323149C1 |
| Комплекс для штамповки деталей из полосового и ленточного материала | 1983 |
|
SU1199379A1 |