усилителем с бесконтактным датчиком, и силовым цилиндром, порше}1ь которого выполнен полым и установлен на валу, при этом рычаг выполнен двуплечим и имеет расположенный на одном из его плеч экран для взаимодействия с бесконтактным датчиком, кроме того, зубчатое колесо закреплено па валу посредством упругой пружнпной муфты.
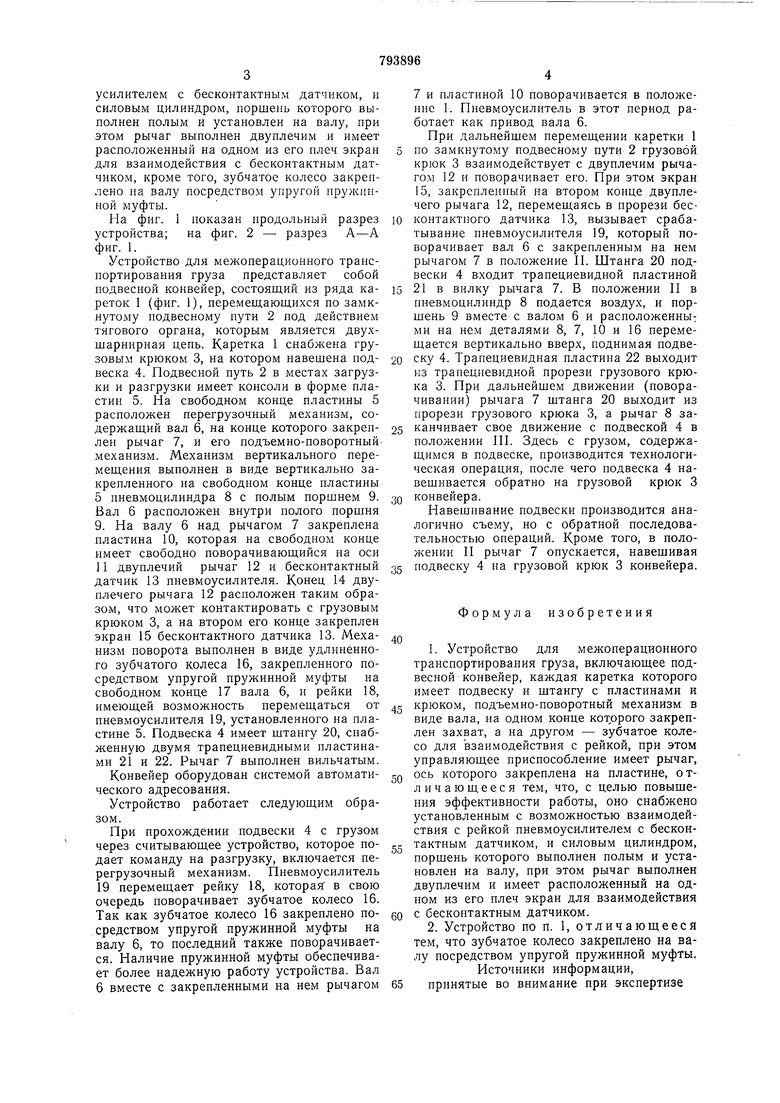
На фиг. 1 показан продольный разрез устройства; на фиг. 2 - разрез А-А фиг. 1.
Устройство для межоперационного транспортирования груза представляет собой подвесной конвейер, состоящий из ряда кареток 1 (фиг. 1), перемещающихся по замкнутому подвесному пути 2 под действием тягового органа, которым является двухшарнирная цепь. Каретка 1 снабжена грузовым крюком 3, на котором навешена подвеска 4. Подвесной путь 2 в местах загрузки и разгрузки имеет консоли в форме пластин 5. На свободном конце пластины 5 расположен перегрузочный механизм, содержащий вал 6, на конце которого закреплен рычаг 7, и его подъемно-поворотный механизм. Механизм вертикального перемещения выполнен в виде вертикально закрепленного на свободном конце пластины
5пневмоцилиндра 8 с полым поршнем 9. Вал 6 расположен внутри полого поршня 9. На валу 6 над рычагом 7 закреплена пластина 10, которая на свободном конце имеет свободно поворачивающийся на оси 11 двуплечий рычаг 12 и бесконтактный датчик 13 пневмоусилителя. Конец 14 двуплечего рычага 12 расположен таким образом, что может контактировать с грузовым крюком 3, а на втором его конце закреплен экран 15 бесконтактного датчика 13. Механизм поворота выполнен в виде удлиненного зубчатого колеса 16, закрепленного посредством упругой пружинной муфты на свободном конце 17 вала 6, и рейки 18, имеющей возможность перемещаться от пневмоусилителя 19, установленного на пластине 5. Подвеска 4 имеет штангу 20, снабженную двумя трапециевидными пластинами 21 и 22. Рычаг 7 выполнен вильчатым.
Конвейер оборудован системой автоматического адресования.
Устройство работает следующим образом.
При прохождении подвески 4 с грузом через считывающее устройство, которое подает команду на разгрузку, включается перегрузочный механизм. Пневмоусилитель 19 перемещает рейку 18, которай в свою очередь поворачивает зубчатое колесо 16. Так как зубчатое колесо 16 закреплено посредством упругой пружинной муфты на валу 6, то последний также поворачивается. Наличие пружинной муфты обеспечивает более надежную работу устройства. Вал
6вместе с закрепленными на нем рычагом
7 и пластиной 10 поворачивается в положение 1. Пневмоусилитель в этот период работает как привод вала 6.
При дальнейшем перемещении каретки 1 по замкнутому подвесному пути 2 грузовой крюк 3 взаимодействует с двуплечим рычагом 12 и поворачивает его. При этом экран 15, закрспленпый на втором конце двуплечего рычага 12, перемещаясь в прорези бесконтактного датчика 13, вызывает срабатывание пневмоусилителя 19, который поворачивает вал 6 с закрепленным на нем рычагом 7 в положение П. Штанга 20 подвески 4 входит трапециевидной пластиной
21 в вилку рычага 7. В положении П в пневмоцилиндр 8 подается воздух, и поршень 9 вместе с валом 6 и расположенньь ми на нем деталями 8, 7, 10 и 16 перемещается вертикально вверх, поднимая подвеску 4. Трапециевидная пластина 22 выходит из трапециевидной прорези грузового крюка 3. При дальнейшем движении (поворачивании) рычага 7 штанга 20 выходит из Г1рорези грззового крюка 3, а рычаг 8 заканчивает свое движение с подвеской 4 в положении HI. Здесь с грузом, содержащимся в подвеске, производится технологическая операция, после чего подвеска 4 навещивается обратно на грузовой крюк 3
конвейера.
Навешивание подвески производится аналогично съему, но с обратной последовательностью онераций. Кроме того, в положении П рычаг 7 опускается, навешивая
подвеску 4 на грузовой крюк 3 конвейера.
Формула изобретения
1.Устройство для межоперационного транспортирования груза, включающее подвесной конвейер, каждая каретка которого имеет подвеску и штангу с пластинами и
крюком, подъемно-поворотный механизм в виде вала, на одном конце которого закреплен захват, а на другом - зубчатое колесо для взаимодействия с рейкой, при этом управляющее приспособление имеет рычаг,
ось которого закреплена на пластине, отличающееся тем, что, с целью повышения эффективности работы, оно снабжено установленным с возможностью взаимодействия с рейкой пневмоусилителем с бесконтактным датчиком, и силовым цилиндром, поршень которого выполнен полым и установлен на валу, при этом рычаг выполнен двуплечим и имеет расположенный на одном из его плеч экран для взаимодействия
с бесконтактным датчиком.
2.Устройство по п. 1, отличающееся тем, что зубчатое колесо закреплено на валу посредством упругой пружинной муфты.
Источники информации, принятые во внимание при экспертизе СССР 1. Авторское свидетельство № 230721, кл. В 65 G 47/00, 1967. 2. Авторское свидетельство СССР № 328045, кл. В 65 G 47/52, 1969.

| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной конвейер для транспортировки длинномерных грузов | 1981 |
|
SU988682A1 |
| Устройство для передачи штучных грузов | 1982 |
|
SU1049381A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Грузовая тележка подвесной монорельсовой дороги | 1984 |
|
SU1261887A1 |
| Устройство для загрузки подвесного конвейера | 1983 |
|
SU1152894A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МЕЖОПЕРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ ГРУЗОВ | 1967 |
|
SU196614A1 |
| Поворотная подвеска грузонесущегопОдВЕСНОгО КОНВЕйЕРА | 1979 |
|
SU814818A1 |
| ЯАТЕНТНО- -^'" | 1970 |
|
SU261986A1 |
| ПОДВЕСНОЙ КОНВЕЙЕР | 1969 |
|
SU239856A1 |
| Устройство для вырубки заготовок из полосового и ленточного материала | 1979 |
|
SU871926A1 |
S 13
