(54) СЖАТ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Способ записи программы промышленного ро-бОТА для СбОРОчНыХ ОпЕРАций | 1979 |
|
SU850371A1 |
| СИСТЕМА РОБОТИЗИРОВАННОЙ СБОРКИ КРУПНОГАБАРИТНЫХ ФЕРМ, В ТОМ ЧИСЛЕ НА ОРБИТЕ ЗЕМЛИ ИЛИ ЛУНЕ | 2021 |
|
RU2790311C2 |
| Схват промышленного робота | 1981 |
|
SU1014701A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| Схват | 1981 |
|
SU952581A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Схват промышленного робота | 1979 |
|
SU812564A1 |
| Захватное устройство | 1988 |
|
SU1650432A1 |
I
Изобретение относится к роботостроению и может быть использовано в про мышпенных роботах, выполняющих сбооочные операвяи.
Игжестен охват щхялышлвнного робота содержащий рычаги с рычажно-кулвсньш приводом и губки, установленные на рычагах lj.
Недостатком этого схвата явлйетса необходимое замены нвЕкладных губок в заввсимости от весовых, габаритных я прочностных карактервстик схватываемых деталей. Т&л самым усложняется конструкшш схвата и уввшчивается время на переналадку оромиштенного . Это затрудняет использовавве робота в сборочном щмжзводстве.
Цель изобретения - увеяичевве тохнологическЕХ возможностей схвата.
Поставленная цель достигается тем, что губки снабжены симметрично устансгал шсыми на их боковых пов хностях Г-ч бразными скобами, снаб кеявьош расположенными на периферийных ttoBcpXBo-
стях обрезиненными вьютупамн, а на внутренних поверхностях губок вьшолнены коническая проточка и призматические пазы различной глубины.
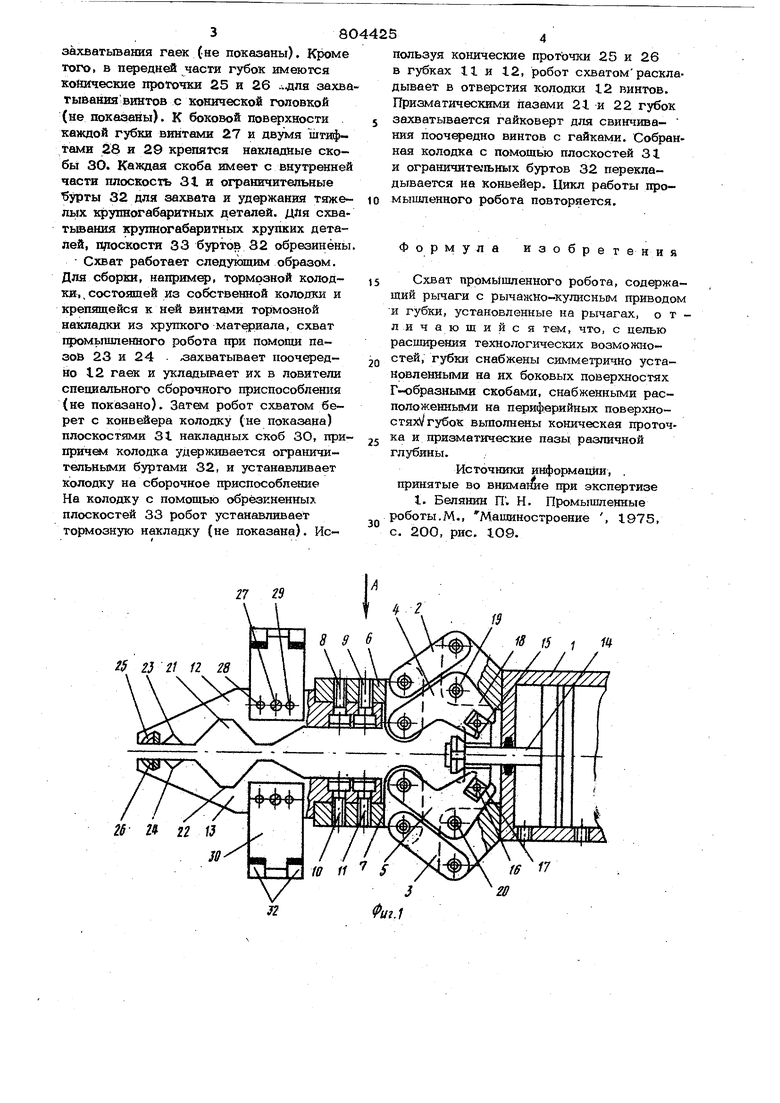
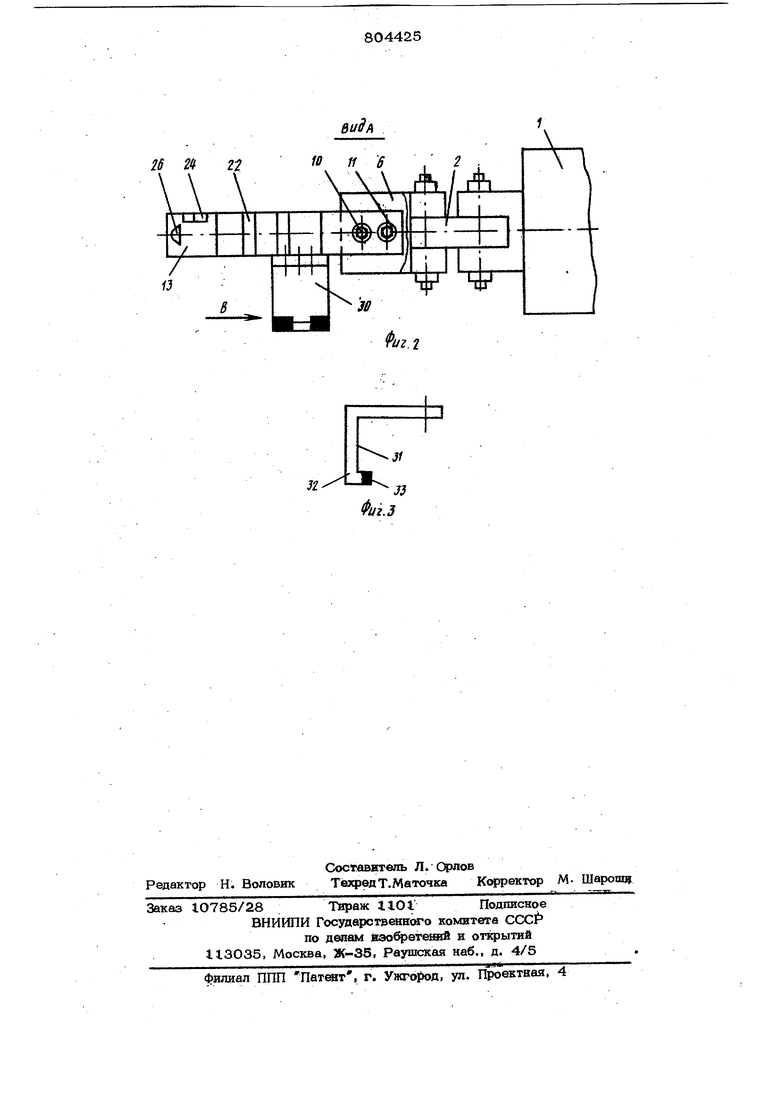
На фнг. t изображен охват, общий вид; на фиг. 2 - вид А на фиг- tv на фиг, 3 - скоба профиль.
Схват cocTWiT из силового цилюадра I к корпусу которо1ч о помошью двух планок а и 3 и двух рычагов 4 и 5 : крепятся два кронштейна 6 и 7. К кронштейнам raiKpeiiofrBoM. болтов 8-11 кр«штоя губки 12 и 13. При движении штока 14 силов ях цилиндра 1 и шарнирно закр€Ш1енвых на нем сухарей 15 и 16,
; (Жользявшх в пазах 17 и 18 рычагов 4 и 5, последние поворачиваются на осях 19 и 2О и сдвигают или раздвигают губки 12 и 13. Г% именяемая схема поз-, воляет осуществлять движения губок па0раллет но друг другу.
В губках вьтолнены призматические пазы 21 и 22 для захватывания гайковерта (не показан ), пазы 23 и 24 для
захватьюания гаек (не показаны). Кроме того, в передней части губок имеются конические проточки 25 и 26 ..для захватывания винтов с конической головкой (не показаны). К боковой поверхности каждой губки винтами 27 и ивумя шгифтами 28 и 29 крепятся накладные скобы ЗО. Каждая скоба имеет с внутренней части плоскость 31 и ограничительные урты 32 для захвата и уд жания тяже ль1Х крупногабаритных деталей, для схватьюания крупногабаритных хрупких деталей, проскости 33 буртов 82 обрезинены
Схват работает следующим образом. Для сборки, например, тормозной колодки, состо5пдей из собственной колодки и крешпцейся к ней винтами тормозной накладки из хрупкого , охват промышленного робота при помощи пазов 23 и 24 захватывает поочередно t2 гаек и укладывает их в ловители специального сборочного приспособления (не показано). Затем робот схватом берет с конвейера колодку (не показана) плоскостями 31 накладных скоб ЗО, приприч л колодка удерживается ограничительными буртами 32, и устанавливает колодку на сборочное приспособление На колодку с помощью обрёзкненных плоскостей 33 робот устанавливает тормозную накладку (не показана). Используя конические протЬчки 25 и 26 в губках 11 и 12, робот схватомраскладывает в отверстия колодки 12 винтов. Призматическими пазами 21 и 22 губок захватывается гайковерт для свинчивания винтов с гайками. Собранная колодка с помощью плоскостей 31 и ограничит&иьных буртов 32 перекладывается на Конвейер. Цикл работы промышленного робота повторяется.
Формула изобретения
Схват промышленного робота, содержащий рычаги с рычажно-кулисным приводо И губки, установленные на рычагах, о т личаюшийс я тем, что, с целью расширения технологических возможностей, губки снабжены симметрично установленными на их боковых поверхностях Г-юбразнымя скобами, снабженными расположенными на периферийных поверхностях /губок выполнены коническая проточка и призматические пазы различной глубины.
Источнитш инфог 4ации, . принятые во внкмагще при экспертизе
I. Беляшга П . Н. Промышленные роботы.М., Машиностроение , 1975, с. 20О, рис. 109.
26 2ft гг
ПBuSA
т. 2
л
