(54) ЦИКЛОВАЯ СИСТЕМА ПРОГРАММНОГО
УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ
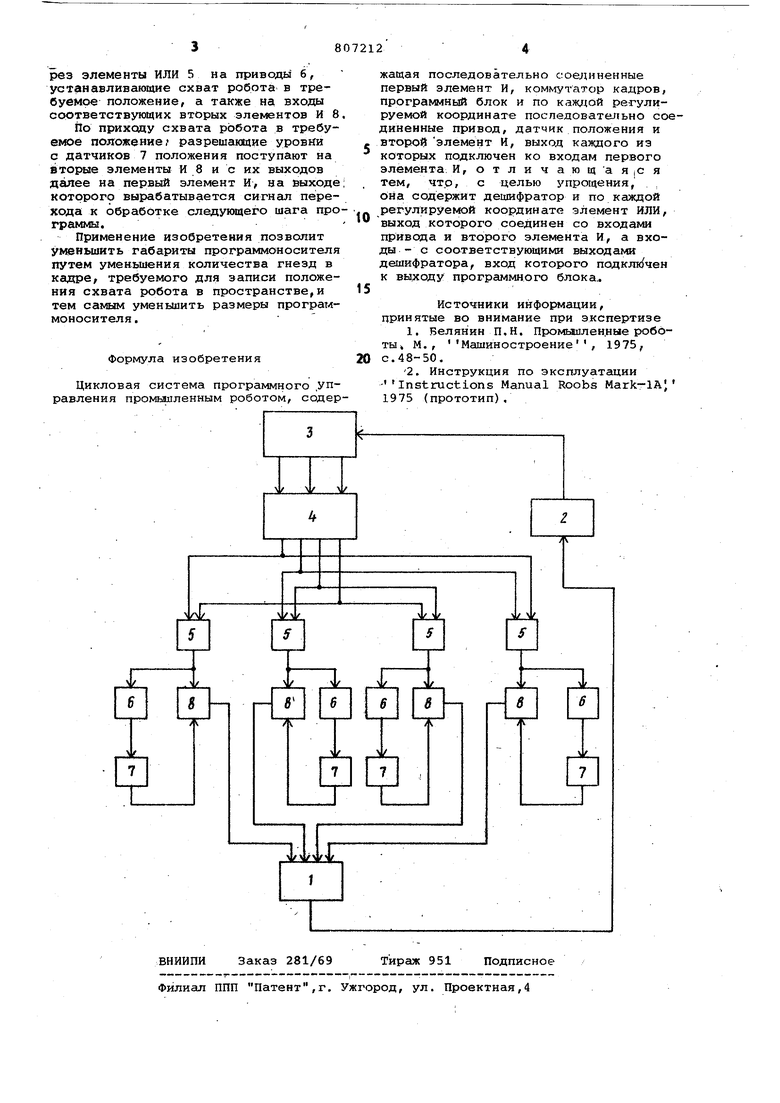
рез элементы или 5 на приводы 6, устанавливающие схват робота в требуемое положение, а также на входы соответствующих вторых элементов И 8,
Йо приходу схвата робота в требуемое положение, разрешающие уровйи с датчиков 7 положения поступают на йторые элементы ИЗ и с их выходов далее на первый элемент И, на выходе; которого вырабатывается сигнал перехода к обработке следующего шага программы.
Применение изобретения позволит уменьшить габариты программоносителя хтутем уменьшения количества гнезд в кадре/ требуемого для записи положения схвата робота в пространстве,и тем самым уменьшить размеры программоносителя .
Формула изобретения
Цикловая система программного .управления промышленным роботом, содержащая последовательно соединенные первый элемент и, коммутатор кадров, программный блок и по каждой регулируемой координате последовательно содиненные привод, датчик положения и второй элемент И, выход каждого из которых подключен ко входам первого элемента И, отличающаЯ|СЯ тем, чтр, с целью упрощения, она содержит дешифратор и по каждой регулируемой координате элемент ИЛИ, выход которого соединен со входами привода и второго элемента И, а входы - с соответствующими выходами дешифратора, вход которого подклн чен к выходу программного блока
Источники информации, принятые во внимание при экспертизе
1. Нел ЯНИН П. Н. Промышленные роботы М., Машиностроение, 1975, с.48-50.
2. Инструкция по эксплуатации -Instructions Manual Roobs Mark-lAj 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цикловая система программного управления промышленным роботом | 1980 |
|
SU935877A2 |
| Цикловая система программного управления промышленным роботом | 1983 |
|
SU1151927A2 |
| Система программного управленияпРОМышлЕННыМ РОбОТОМ | 1978 |
|
SU807213A1 |
| Система контурного программного управления манипулятором | 1977 |
|
SU620368A1 |
| Устройство для программного управления манипулятором | 1985 |
|
SU1315291A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Позиционная система программного управления промышленным роботом | 1977 |
|
SU732819A1 |
| Устройство для циклового управления промышленным роботом | 1982 |
|
SU1037211A1 |
| Цикловая система программного управления манипулятором | 1976 |
|
SU621569A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
