(54) КАНТОВАТЕЛЬ АРМАТУРНЫХ КАРКАСОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи изделий с одного конвейера на другой | 1973 |
|
SU469642A1 |
| УСТРОЙСТВО ДЛЯ ОТДЕЛКИ НАРУЖНОЙ ПОВЕРХНОСТИ СТЕНОВЫХ ПАНЕЛЕЙ | 1971 |
|
SU296875A1 |
| Кантователь форм | 1979 |
|
SU814747A1 |
| Кантователь | 1981 |
|
SU996153A1 |
| Кантователь для поворота формы с бетонным или железобетонным изделием | 1979 |
|
SU982929A1 |
| Перегрузочное устройство для изде-лий | 1979 |
|
SU816897A1 |
| Линия для изготовления пространственных арматурных каркасов | 1986 |
|
SU1388230A1 |
| Кантователь | 1983 |
|
SU1154175A1 |
| Линия формирования садки сырца-кирпича на печную вагонетку | 1987 |
|
SU1412975A1 |
| Устройство для гибки арматурных сеток | 1986 |
|
SU1397133A1 |

1
Изобретение относится к строителству и касается конструирования кан тователей арматурных каркасов.
Известен кантователь арматурных каркасов, содержащий основание, несущее поворотную посредством силового цилиндра раму с подвижной балкой, .связанной- с рь1чажной системой, снабженной дополнительным силовым цилиндром и захватом, подвижно смонтированным на валу в верхней части поворотной рамы,выполненной со вспомогательным силовым цилиндром 1 .
Недостаток указанного кантователя - невозможность кантования разногабаритных каркасов.
Цель изобретения - обеспечение . кантования разногабаритных каркасов
Для достижения цеЛи он снабжен выравнивающим устройством в виде гидроцилиндра с толкателем, поперечно перемещающимся в поворотной раме а захват выполнен с хвостовиком, взаимодействующим со штоком дополнительного силового цилиндра, при этом подвижная балка смонтирована с возможностью вертикального перемещения.
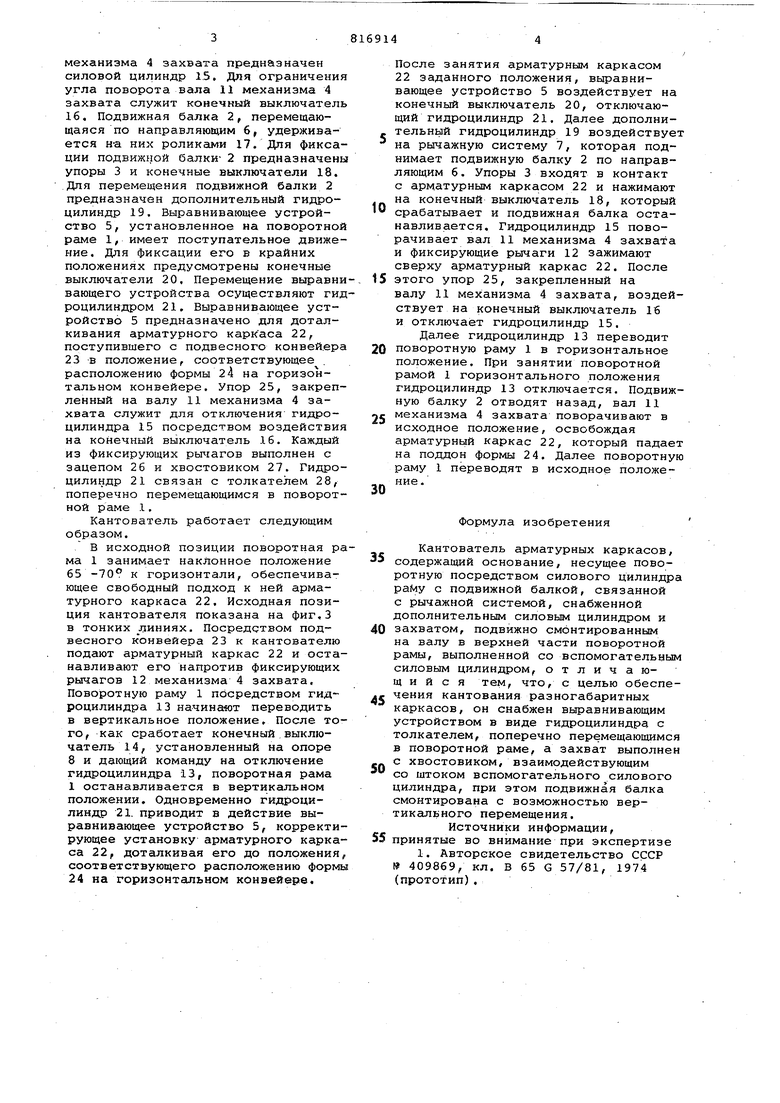
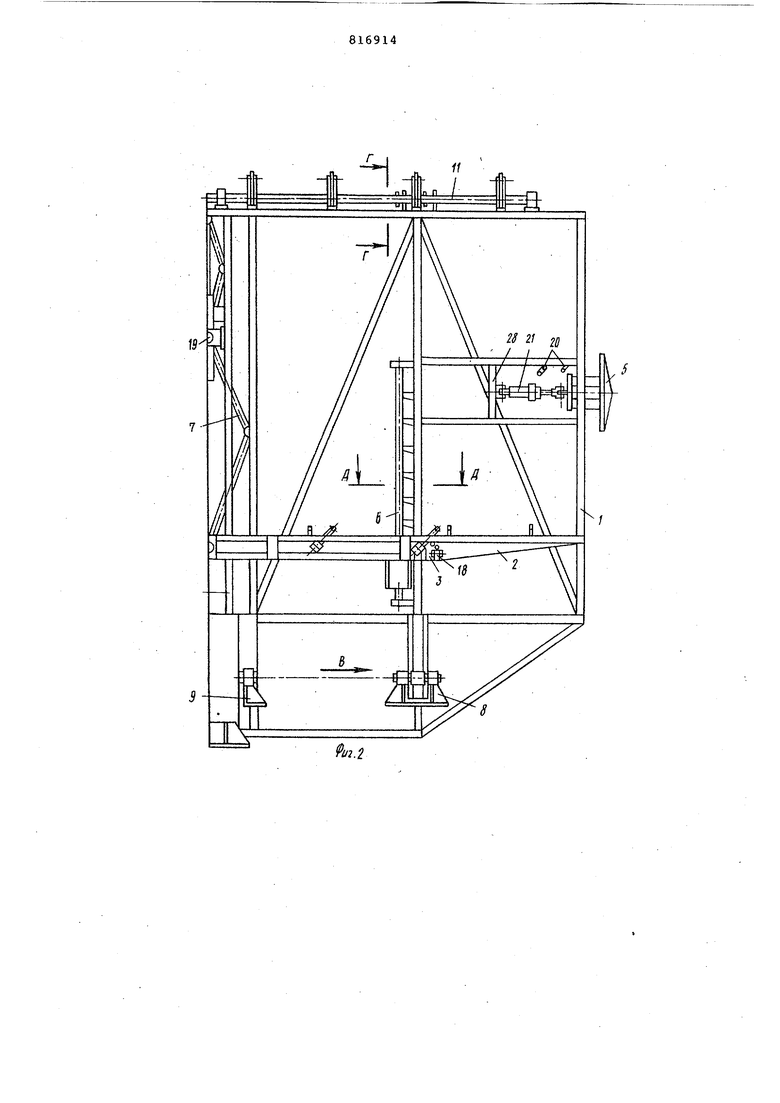
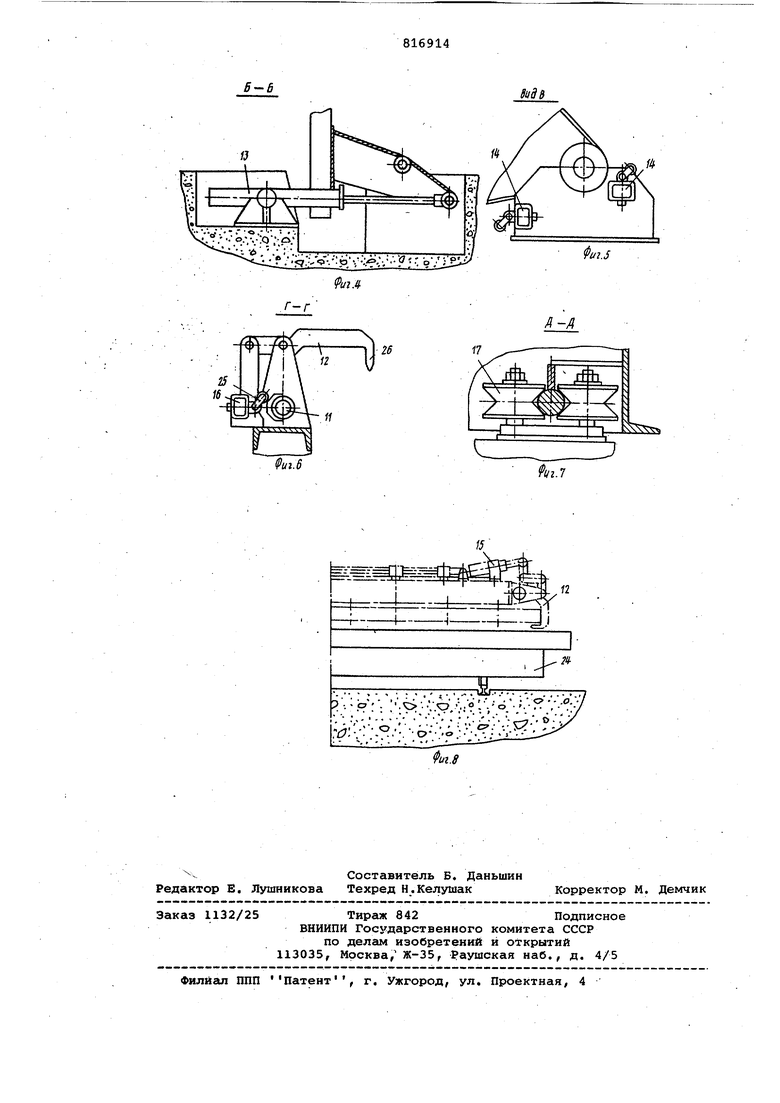
На фиг. 1 изображен схематически кантователь, вид спереди; на фиг.2 то же, вид сзади; на фиг. 3 - вид по стрелке А на фиг.1; на фиг. 4 сечение Б-Б на фиг. 1; на фиг. 5 вид по стрелке В на фиг. 2; на фиг. 6 - сечение Г-Г на фиг. 2; на фиг. 7 - сечение Д-Д на фиг. 2; на фиг. 8 - кантователь в положении
укладки арматурного каркаса в форму.
Кантователь содержит поворотную раму 1, на которой смонтированы подвижная балка 2, упоры 3, механизм
4 захвата и выравнивающее устройство 5. Подвижная балка 2 оснащена направляющими 6 и рычажной системой 7. Рычажная система 7 закреплена на поворотной раме 1, выполненной с
возможностью поворота вокруг горизонтальной оси опор 8 и 9, установленных на фундаменте 10. Механизм 4 захвата выполнен в виде вала 11 с фиксируквдими рычагами 12. Для привода поворотной рамы 1 служит гидроцилиндр 13, закрепленный на фундаменте 10. На опоре 8 установлены конечные выключатели 14,предназначенные для фиксации угла поворота поворотной рамы 1. Для поворота вала 11
механизма 4 захвата предназначен силовой цилиндр 15. Для ограничения угла поворота вала 11 механизма 4 захвата служит конечный выключатель 16. Подвижная балка 2, перемещающаяся по направляюйдам 6, удерживается н-а них роликами 17. Для фиксации подвижной балки- 2 предназначены упоры 3 и конечные выключатели 18. Для перемещения подвижной балки 2 предназначен дополнительный гидроцилиндр 19. Выравнивающее устройство 5, установленное на поворотной раме 1, имеет поступательное движение. Для фиксации его в крайних положениях предусмотрены конечные выключатели 20. Перемещение выравни Бающего устройства осуществляют гидроцилиндром 21. Выравнивающее устройство 5 предназначено для доталкивания арматурного каркаса 22, поступившего с подвесного конвейера 23 в положение, соответствующее, расположению формы 24 на горизонтальном конвейере. Упор 25, закрепленный на валу 11 механизма 4 захвата служит для отключения гидроцилиндра 15 посредством воздействия на конечный выключатель 16. Каждый из фиксирующих ры гагов выполнен с зацепом 26 и хвостовиком 27. Гидроцилиндр 21 связан с толкателем 28, поперечно перемещающимся в поворотной раме 1.
Кантователь работает следующим образом.
В исходной позиции поворотная рама 1 занимает наклонное положение 65-709 к горизонтали, обеспечивающее свободный подход к ней арматурного каркаса 22. Исходная позиция кантователя показана на фиг.З в тонких линиях. Посредством подвесного конвейера 23 к кантователю подают арматурный каркас 22 и останавливают его напротив фиксирующих рьочагов 12 механизма 4 захвата. Поворотную раму 1 посредством гидроцилиндра 13 начинают переводить в вертикальное положение. После того, как сработает конечный выключатель 14, установленный на опоре 8 и дающий команду на отключение гидроцилиндра 13, поворотная рама 1 останавливается в вертикальном положении. Одновременно гидроцилиндр 21. приводит в действие выравнивающее устройство 5, корректирующее установку арматурного каркаса 22, доталкивая его до положения, соответствующего расположению формы 24 на горизонтальном конвейере.
После занятия арматурным каркасом 22 заданного положения, выравнивающее устройство 5 воздействует на конечный выключатель 20, отключающий гидроцилиндр 21. Далее дополнительный гидроцилиндр 19 воздействует на рычажную систему 7, которая поднимает подвижную балку 2 по направляющим 6. Упоры 3 входят в контакт с арматурным каркасом 22 и нажимают на конечный выключатель 18, который
срабатывает и подвижная балка останавливается. Гидроцилиндр 15 поворачивает вал 11 механизма 4 захвата и фиксирующие рычаги 12 зажимают сверху арматурный каркас 22. После
5 этого упор 25, закрепленный на
валу 11 механизма 4 захвата, воздействует на конечный выключатель 16 и отключает гидроцилиндр 15.
Далее гидроцилиндр 13 переводит
0 поворотную раму 1 в горизонтальное положение. При занятии поворотной рамой 1 горизонтального положения гидроцилиндр 13 отключается. Подвижную балку 2 отводят назад, вал 11
5 механизма 4 захвата поворачивают в исходное положение, освобождая арматурный каркас 22, который падает на поддон формы 24. Далее поворотную раму 1 переводят в исходное положе0
Формула изобретения
Кантователь арматурных каркасов, содержащий основание, несущее поворотную посредством силового цилиндра раМу с подвижной балкой, связанной с рычажной системой, снабженной дополнительным силовым цилиндром и
0 захватом, подвижно смонтированным на валу в верхней части поворотной рамы, выполненной со вспомогательным силовым цилиндром, о т л и ч а ющ и и с я тем, что, с целью обеспее чения кантования разногабаритных каркасов, он снабжен выравнивающим устройством в виде гидроцилиндра с толкателем, поперечно перемещающимся в поворотной раме, а захват выполнен с хвостовиком, взаимодействующим со штоком вспомогательного силового цилиндра, при этом подвижная балка смонтирована с возможностью вертикального перемещения.
Источники информации,
5 принятые во внимание при экспертизе
11
.1
( Ш:Ш
., ° :. „:. . -. : - -°- . -
25
Г:f/ ; :;:.Чг;-:оУ /; - b/jp
Г-г
9иг.6
-. - су. ..
У--.о.--- Ь :5 .
.:-: :, .:Д-Д
i7
пЛ
-:
-.,о:у о . ::(:;-c.
