(54) ЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перекладки изделий | 1980 |
|
SU893805A2 |
| Устройство для маркирования листового материала | 1982 |
|
SU1159679A1 |
| Устройство для перекладки изделий | 1977 |
|
SU650948A1 |
| Устройство для удаления отходов из рабочей зоны пресса | 1990 |
|
SU1759510A1 |
| Машина для сборки изоляторов | 1986 |
|
SU1403107A1 |
| Автомат для запрессовки | 1981 |
|
SU994195A1 |
| Устройство для вырубки пазов | 1982 |
|
SU1147485A1 |
| Автомат для сборки резьбовых соединений | 1975 |
|
SU568530A1 |
| Устройство для сборки и сварки кронштейнов ленточных конвейеров | 1977 |
|
SU716758A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
. .
Изобретение; относится к вспомогательному оборудованию кузнечно-прэссовых цехов и может быть использовано при захвате и переносе обрабатываемых заготовок. ..
Известно захватное устройство, содержащее раму, размещенный в ней с возможностью перемещения держател с шарнирно.смонтированными на нем и подпружиненными друг относительно друга зажимными рычагами и узел сведения зажимных рапагов с фиксатором положения 1. . .
Недостатками данного устройства являются невысокие производитель- . ность и надежность работы.
Цель изобретения - повышение произво хительности и нгшежности работы.
Цель достигается тем, чт.о в захватном устройствеt .содержащем раму, размещенный в ней с возможностью перемещения держатель с гаарнирно смонтированными на нем и подпружиненными друг относительно друга зажимными рычагами и .узел сведения зажимных рычагов с фиксатором положения, рама снабжена направляющими, держатель установлен в направляютактирукнцими с узлом сведения зажимных рычагов, при этом узел сведения згикимных рычагов выполнен в виде приводной ползушки с У-образным рабочим вырезом, а рама снабжена упорами, уст.ановленными на ней с возможностью контактирования с фиксатором положения уйла сведения зажимных рычагов и стопорами держа-,
0 теля. Креме того, стопоры держателя могут быть выполнены в подпружиненных собачек.
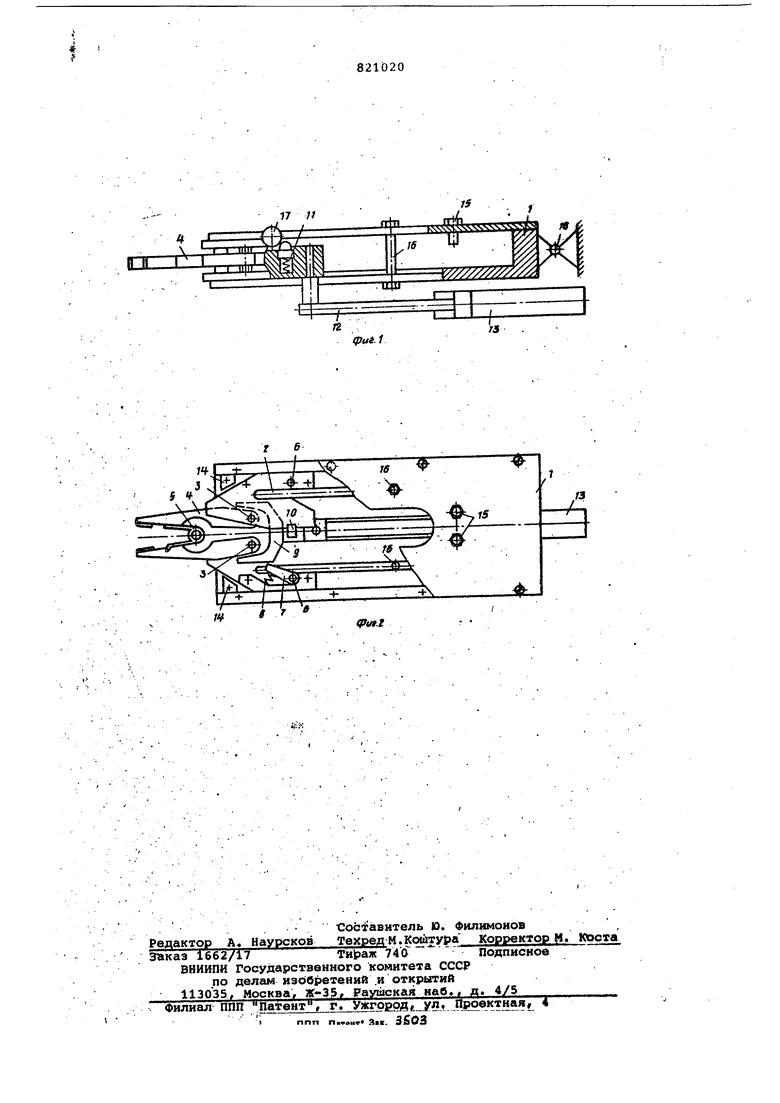
На фиг. 1 показано захватное устройство, общий вид в разрезе
5 на фиг. 2 - то же, вид в плане.
Захватное устройство содержит раму 1, в направляющих которой установлен держатель 2, в котором на осях 3 установлены два однопле0чих рычага 4 с пружиной 5 сжатия, . а на осях 6 шарнирно укреплены собачки 7, подпружиненные пружинами ,8. и расположенные по обе стороны , от V-образной ползушки 9.,. Ползушка 5 снабжена ступенчатым фиксатором 10 с пружиной 11. Фиксатор служит для зацепления ползушки 9 с держателем 2. Ползушка 9 с помощью штока 12 связана с гидроцилиндром 13 и разт пя-аяу прпжлтеЛЯ 2. На оа-
n
.a
ме 1 для ограничения величины возвратно-поступательного хода держателя 2 установлены упоры 14 и 15, а для отжатия собачек 7 - два упора 16 Для вывода из зацепления держателя 2 и ползушки 9 путем нажатия на ступенчатый фиксатор 10, на раме 1 установлен упор 17, выполненный, например/ в аиде шарика либо ролика. Для.возможности установки устройства под любым углсян к горизонтальной плоскости, что может потребоваться при изменении фор««а снимаемых изделий, рама 1 соединена с базой регулируемым шарниром 16.
Устройство работает в автоматическом режиме следующим образом. Рама 1 с помощью шарнира 18 устанавливается под необходимым углом к горизонтальное плоскости. Шток 12 гидроцилиндра 13 в исходном: положении втянут, собачки 7 находятся в разведенном положении и свободньв ли концами лежат на боковых поверхностях ползушки 9.
Рычаги 4 под действием пружины , 5 находятся в разомкнутом состоянии ступенчатый фиксатор 10 выдвинут пружиной 11. При этом фиксатор 10 обеспечивает сцепление ползушки 9 с держателем 2. Между пазом ползушки 9 и клиновыми поверхностями рычагов имеется некоторый зазор.
С началом работы шток 12 выдвигается и. перемещает связанную с ним ползушку 9 и находящийся с ней в зацеплении держатель 2 вдоль рамы 1 Упоры 14 останавливают движение держателя 2 и рычагов -4 в зоне захвата изделий таким образом, чтобы изделие располагалось между рычагами . В момент остановки держателя 2, упор 17 вдавливает ступенчатый фиксатор 10 и, тем самым, выводит полэушку У из зацепления с держателем 2. Дальше шток 12 перемещает уже только ползушку 9 по пазам в держатле 2. Ползушка 9 надвигается на клиновые поверхности подпружиненнцх одноплечих рычагов 4 и,преодолевая сопротивление пружины 5, сжимает их до захвата свободными концами рычагов 4 изделия. Перемеедение ползушки 9 относительно держателя 2 освобождает собачки 7,- н последние поя действием пружин В сжатия соскакмаают на скошенные края полэушки 9, тем самым эаклинивфя ее .и сцепляя с держателем 2. При обратном ходе шток 12 перемещает полэушку 9 к держатель 2 до того момента, когда упоры 15 останавливают движение держателя 2, и одновременно собачки 7 войдут в контакт с упорами 16, которые при дальнейшем движении ползушки 9 разводят собачки 7 в исходное положение, т.е. освобождают ползушку 9 от связи с держателем 2. Далее перемещается только ползушка 9 по пазам в держателе :2 до того момента, когда положение ползушки и держателя совпадает с исходным, а пружина 11 выдвигает фиксатор 10, который вводит их в зацепление, а образовавшийся зазор между ползушкой и клиновыми поверхностями рычагов 4 освобождает рычаги. При. этом свободные концы рычагов 4 под действием пружины 5 расходятся, и происходит сброс изделия в тару. После этого механизм готов
к повторению цикла.
Предлагаемое захватное устройство обладает высокими производительностью и надежностью работы.
Формула изобретения
тем, что, с целью повышения производительности и надежности работы, рама снабжена направляющими,держатель установлен в направляющих рамы и снабжен стопорами, контактирующими с узлом сведения зажимных рычагов, при этом узел сведения зажимных рычагов выполнен в виде приводной ползушки с У-образньм рабоч м вырезом, а рама снабхсена
упорами, установленными на ней с возможностью контактирования с Фиксатором положения узла сведения за- жимных рычагов и стопорами держателя,,
2, Устройство по п. 1, о т л ичающееся тем, что стопоры держателя выполнены в виде подпружиненных собачек.
Источники инфори|ации, прг нятые во внимание при экспертизе
17 }t
в
Ipui 1
fpMt
