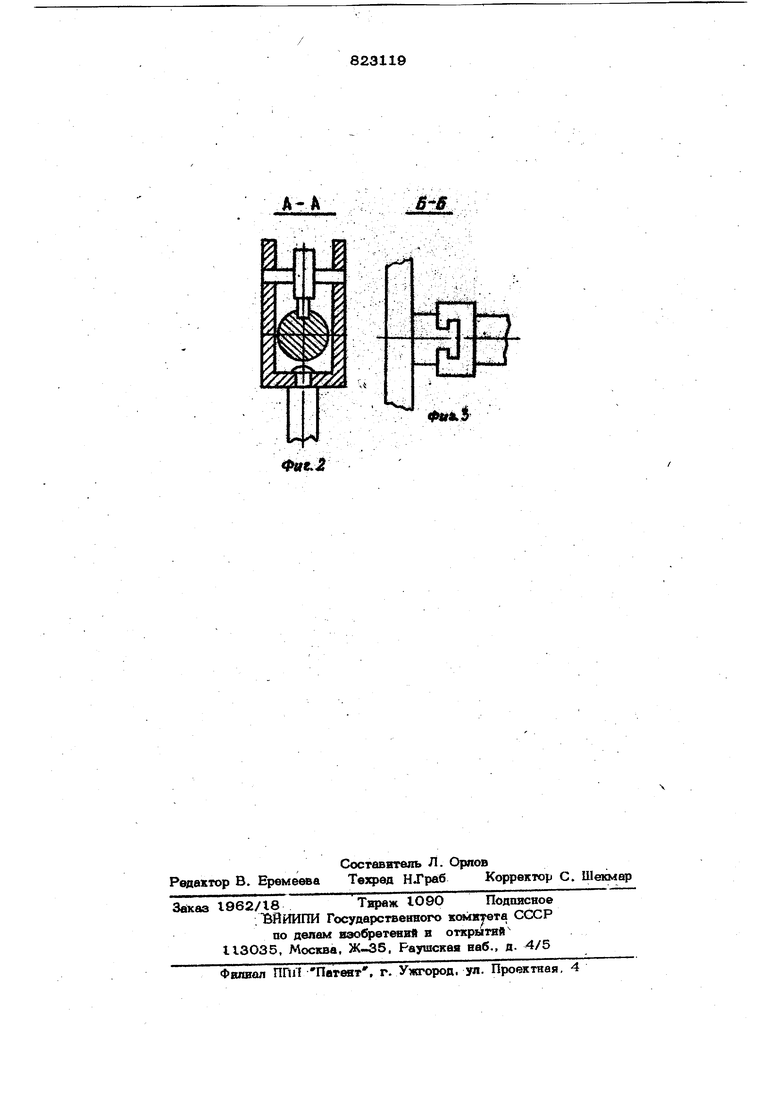
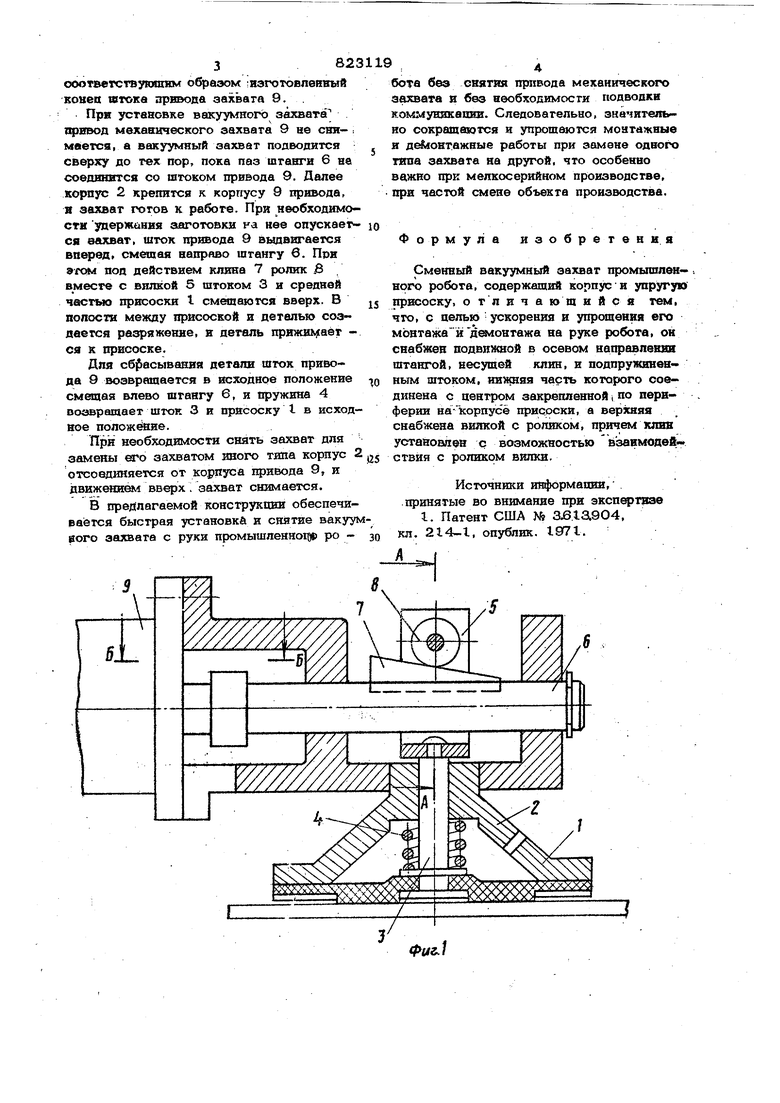
ооотввтствугошкм образом :иэгоговле(1вый коиеа штока прввопа захвата 9. . При установке вакуукгаогЬ захвата привод механического захвата 9 не снимвется, а вакуумный захват подводится сверху до тех пор, пока паз штаЕсги 6 на соедвнвтся со штоком привода 9. Далее корпус 2 крепится к корпусу 9 привода, я захват готов к работе. При необходимо сти уаерЖйния заготовки на нее опускаем ся вахват, шток привода 9 выдвигается вперед смещая направо штангу в. При под действием клина 7 ролик В вместе с вшшой 5 штоком 3 и средней чвстыо присоски t смешаются вверх. В полости мех(ду присоской и деталью соз дается разряжение, и деталь прижи авт ся к присоске. Для сб асывания детали шток приво да 9 возвращается в исходное положение смадая влево штангу 6, и пружина 4 воэвращает Ш1ЧЭК 3 и присоску I в исход ное положение. Прн необходимости снять захват для замены «го захватом иногю типа корпус отсоединяется от корпуса привода 9, и движенивм вверх. захват снимается. В предлагаемой конструкции обеспечивается быстрая установка и снятие вакуу вого захвата с руки промышленного ро бота беэ снятия привода механического захвата и без необходимости подводки коммунвкашш. Следовательно, значителыно сокращаются и упрощаются монтажные и д онтажные работы при 3cuvieHe одного типа захвата на другой, что особенно вджно при мелкосерийном производстве, при частой смене объекта производства. Ф ормула изобретения Сменный вакуумный захват промышленного робота, содержащий корпус и упругую присоску, о т л и ч а ю щ и и с я тем, что, с целью ускорения и упрощения его монтажа идемонтажа на руке робота, он снабжен подвижной в осевом направлении штангой, несущей клин, и подпружиненным штоком, нижняя часть которого соединена с центром закрепленной i по периферии на-1сорпусё прис«Х5КИ, а верхняя снабжена вилкой с роликом, причем клив установлен с возможностью взавмодей- ствия с роликом вилки. Источники информации, принятые во внимание при экспертизе I. Патент США М аб1а9О4, кл. 2l4.l, опублик. 1971,
ф|г41
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1979 |
|
SU841963A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Робототехнический комплекс для обработки часовых деталей | 1989 |
|
SU1699690A1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Исполнительный орган промышленного робота | 1978 |
|
SU768633A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
| Устройство для поштучной выдачи заготовок | 1987 |
|
SU1456271A1 |
| Устройство для подачи кож к обрабатывающему агрегату | 1985 |
|
SU1326520A1 |