1
Изобретение относится к машиностроению и может быть использовано в автоматических устройствах для соединения груза с грузозахватным органом.
Известно подъемно-поворотное устройство, содержащее корпус с пазом и подвижный шток с грузовым захватом на конце и байонетным пазом на боковой поверхности f1.
Недостаток заключается в том, что данное устройство работает надежно в том случае если расстояние между корпусом устройства и деталью, находящейся на конвейере, в процессе работы остается постоянным и не обеспечивает надежный захват детали, если расстояние междУ корпусом устройства и поверхностью детали изменяется в процессе работы. Это быть при биении ленты конвейера а также в случае изменения габаритов транспортируемых деталей.
Цель изобретения - обеспечение надежного захвата объектов, находящихся на различных расстояниях от грузозахватного устройства.
Для достижения поставленной цели шток снабжен подпружиненной втулкой с двумя пальцами, причем один палец
входит в байонетный паз штока, а другой - в паз корпуса.
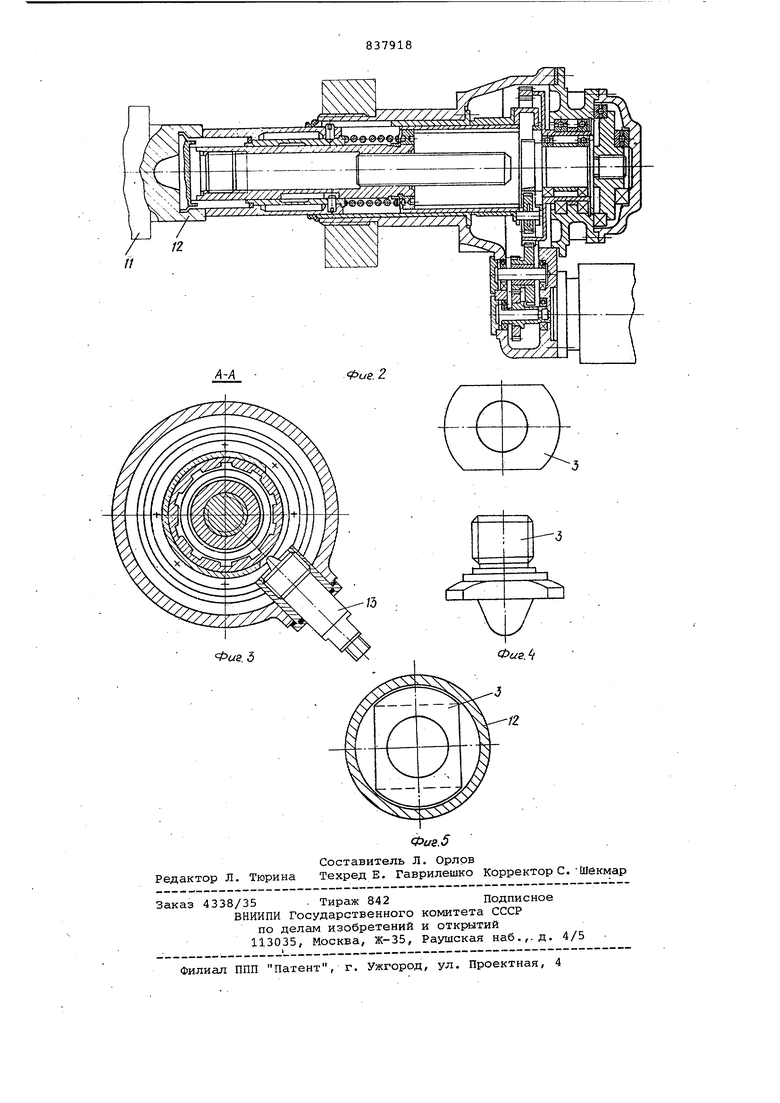
На фиг. 1 изображено устройство в исходном положении; на фиг. 2 - то же, в момент стыковки и захвата; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - захватJ на фиг. 5 - положение захвата в гнезде после разворота на 90° .
o
Грузозахватное устройство имеет корпус 1, в котором с возможностью возвратногпоступательного перемещения установлен шток 2, имеющий на конце захват 3, а на боковой поверх5ности байонетный Г-образный паз., в котором размещен палец 4, запрессованный во втулку 5, подпружиненную пружиной 6. Во втулке запресрован палец 7, входящий в продольный паз
0 втулки 8, жестко скрепленной с корпусом. Шток через винт 9, планетарную передачу и редуктор соединен с электроприводом 10. Груз 11 имеет гнездо 12 с двумя сферическими опор5ными поверхностями. В корпусе грузозахватного устройства имеется конечный выключатель 13, подающий команды на отключение электропривода 10. Грузозахватное устройство уста0 -новлено на корпусе 14 грузоподъемного средства, например на руке манипулятора.
Грузозахватное устройство работает следующим образом.
При работе электропривода 10 винт
9сообщает штоку 2 поступательное движение. Вначале шток 2 перемещается-вместе с втулкой 5, при этом палец 7, скользя по пазу втулки 8, удерживает втулку 5 от проворота.При упоре втулки 5 в торец гнезда 12 груза 11 продольное перемещение втулки 5 прекращается и шток продолжает перемещаться один, сжимая пружину 6. Палец 4 при этом скользит по байонетному Г-образному пазу штока 2. Захват 3 вХодит в гнездо 12 до упора в сферическую поверхность при этом палец 4 совмещается с поперечным участком байонетного паза, шток 2 вместе, с захватом 3 и водилом планетарного механизма разворачивается на . Скосы, выполненные на водила воздействуют на конечный выключатель
13 и он формирует команду на выключение электропривода 10. Происходит надежное сцепление груза с грузозахватным -устройством. При изменении направления вращения электропривода
10происходит разворот штока 2 вместе с захватом 3, затем шток 2 убирается, пружина 6 при этом поджимает втулку 5 к торцу гнезда 12. При упоре пальца 4 в торец байонетного паза штока 2 убирается втулка 5, отходя от гнезда 12. Груз освобождается от грузозахватного устройства грузоподъемного средства.
Формула изобретения
Грузозахватное устройство, содержащее корпус с пазом и подвижный шток с грузовым захватом на конце и байонетным пазом на боковой поверхности, отличающееся тем, что, с целью обеспечениянадежного захвата объектов., находящихся на различных расстояниях от грузозахватного устройства, шток снабжен подпружин нной втулкой с двумя пальцами, причем один палец входит в байонетный паз штока, а другой - в паз корпуса. .
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 546536, кл. В 65 G 47/22 1977.

| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНОЕ ГРУЗОПОДЪЕМНОЕ ПРИСПОСОБЛЕНИЕ | 2009 |
|
RU2406678C1 |
| Транспортная установка для передачи изделий с одного конвейера на другой | 1981 |
|
SU1006345A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Автоматический захват | 1983 |
|
SU1174366A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Грузозахватная система | 1990 |
|
SU1787918A1 |
| Захват-кантователь для грузов цилиндрической формы с центральным отверстием | 1989 |
|
SU1668272A1 |
| ГРУЗОЗАХВАТНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДВЕСНЫХ КОНВЕЙЕРОВ | 1967 |
|
SU215087A1 |
| Подвесной конвейер | 1980 |
|
SU933564A1 |
| Телескопический подъемник | 1990 |
|
SU1754641A1 |
Фив. /
