(54) ШАГАЩИЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий конвейер | 1980 |
|
SU905167A1 |
| Устройство для перегрузки штучных грузов | 1979 |
|
SU874501A1 |
| Шагающий конвейер | 1980 |
|
SU956377A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 1970 |
|
SU283893A1 |
| Шагающий конвейер | 1978 |
|
SU742287A1 |
| Шагающий конвейер | 1980 |
|
SU935398A1 |
| Линия горячей штамповки | 1989 |
|
SU1707466A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| Способ транспортирования изделий с цилиндрическими опорными поверхностями шагающим конвейером | 1988 |
|
SU1623922A1 |
I
Изобретение относится к машиностроению, в частности к транспортирующим устройствам, и может быть использовано при перемещении плоских изделий в объеме, ограниченном по высоте, например при транспортировании полупроводниковых пластин между электродами в установках плазмохимического травления с диодной системой возбуждения разряда.
Известно устройство для перемещения изделий, вьшолненное в виде шарнирного параллелограмма, одно звено которого неподвижно зак;реплено. При приложении момента сил к одному из незакрепленных звеньев механизм совершает дискретное перемещение изделий на. шаг fl .
Недостаток данного устройства заключается в том, что оно обеспечивает перемещения изделий только на равные величины как по вертикали, так и по горизонтали. В то же время возникает необходимость перемещать
изделия на небольшую величину по вертикали и на большую - по горизонтали.
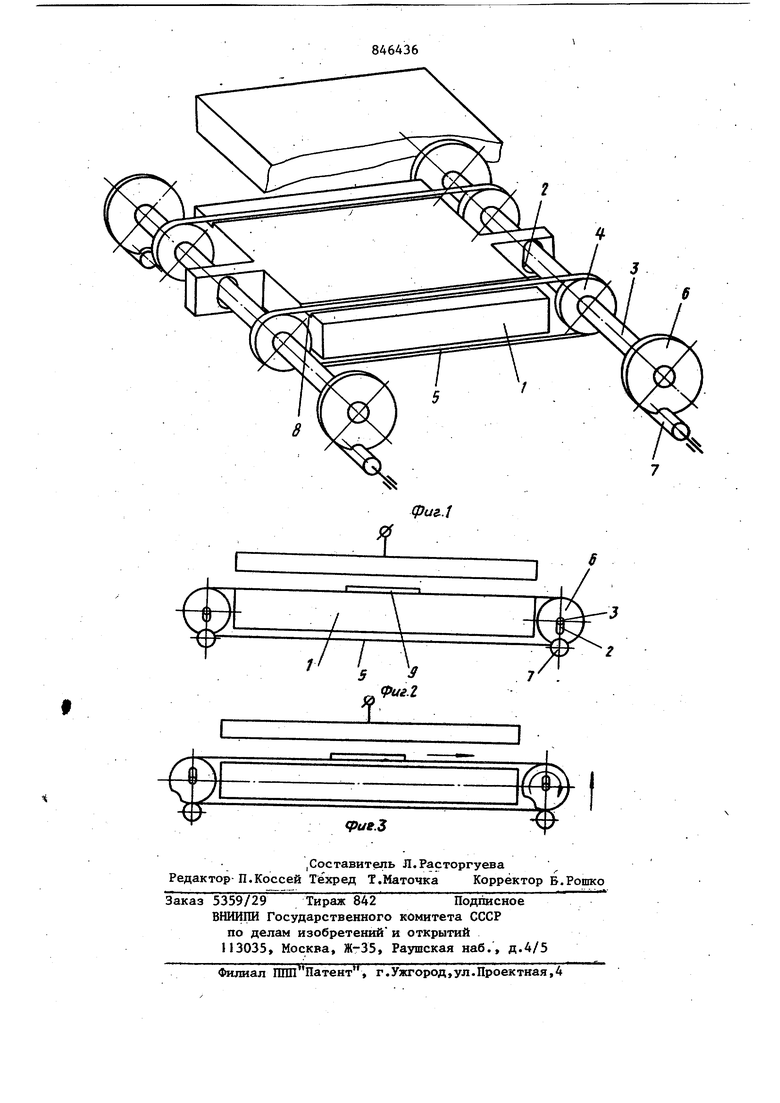
Наиболее близким к предлагаемому является шагающий конвейер, содержащий неподвижную плиту с пазами, в которых размещены носители, расположенные на подвижных в вертикальной плоскости шкивах, связанных с приводом горизонтального перемещения. Но10ситель вьтолнен в виде отдельных бгшок а каждая опора оборудована контактирующим с соответствующей балкой двухребордным роликом. При перемещении груза опоры,поднимающие проtsдольные балки,, поворачиваются с помощью привода. Продольные балки поднимаются вьш1е балок, на которых расположен груз, и приподнимают его. После этого с помощью другого приво20да перемещаются в горизонтальной плоскости продольные балки вместе с грузом. Затем груз снова опускается на балки, на которых он был распо38ложен, и продольные балки возвращаются в исходное положение 2. Недостаток данного устройства заключается в сложности конструкции, обусловленной наличием двух раздельных приводов для вертикального и горизонтального перемещения груза. Кроме того, известный конвейер не обеспечивает высокой производительности ввиду того, что необходимо эре мя для холостого хода конвейера при возврате его в исходное положение. Целью изобретения является упрощение конструкции и повышение производительности. Указанная цель достигается тем, что в шкивах выполнены пазы, а неподвижная плита имеет ролики, уста новленные с возможностью взаимодейст вия с пазами при опускаьши носителей На фиг. 1 изображен шагающий кон вейер, общий вид; на фиг. 2 - положе ние конвейера в момент выстоя обраба тываемого изделия на позиции обработ ки{ на фиг. 3 - то же, в момент пере носа обрабатываемого изделия на новую позицию. Шаговый конвейер состоит из плиты 1 с вертикальньшм пазами 2, в которых располагаются оси 3 с закрепленными на них шкивами 4, несущими гибкие движители 5, и подъемными шкивами 6, опирающимися своими пазам на ролики 7. Гибкие движители 6 утоплены в пазу 8 плиты 1 (фиг,1}. Устройство работает следующим образом. Пазы подъемных шкивов (фиг.1 и 2) совпадают с опорными плоскостями роликов 7. В этом положении гибкие движители 5 утоплены в пазах 8 плиты 1 и обрабатываемое изделие 8 (не показано) лежит на плоскости неподвижной плиты 1. При включении привода (не показан) пазы подъемных шкивов 6 выходят из зацепления с роликами 7 (фиг.3), .приподнимая гибкие движите ли 5 нал плитой 1 на величину, равну разности глубин пазов подъемных шкивов 6 и пазов 8 плиты 1. При зтом обрабатываемое изделие 9 приподнимается над плитой 1 и переносится на расстояние, равное разности длины окружности подъемного шкива 6 и части длины окружности паза шкива 6. После совершения одного оборота подъемных шкивов 6 (при совпадении их пазов с роликами 7) гибкие движители 5 утопятся в пазу 8 плиты 1, и обрабатываемое изделие 9 останавливается на новой позиции. Таким образом, конвейер позволяет осуществить при соответствующем подборе соотношения длины окружности подъемного шкива, глубины паза и диаметра ролика, значительные, например 125 мм, горизонтальные перемещения при весьма малых, например 1-2 мм вертикальных перемещениях обрабатываемого изделия. изобретения Формула Шагающий конвейер, содержащий неподвижную плиту с пазами, в которых размещены носители, расположенные на подвижных в вертикальной плоскости шкивах, связанных с приводом горизонтального перемещения, отличающийся тем, что, с целью упрощения конструкции и повышения производительности, в шкивах выполнены пазы, а неподвижная плита имеет ролики, установленные с возможностью взаимодействия с пазами при опускании носителей. Источники информации, принятые во внимание при экспертизе 1.Артоболевский И.И. Механизмы в современной технике. М., Наука, 1970, Т.1, с.376. 2.Авторское свидетельство СССР № 309883, кл. В 65 G 25/00, 1969 (прототип).
