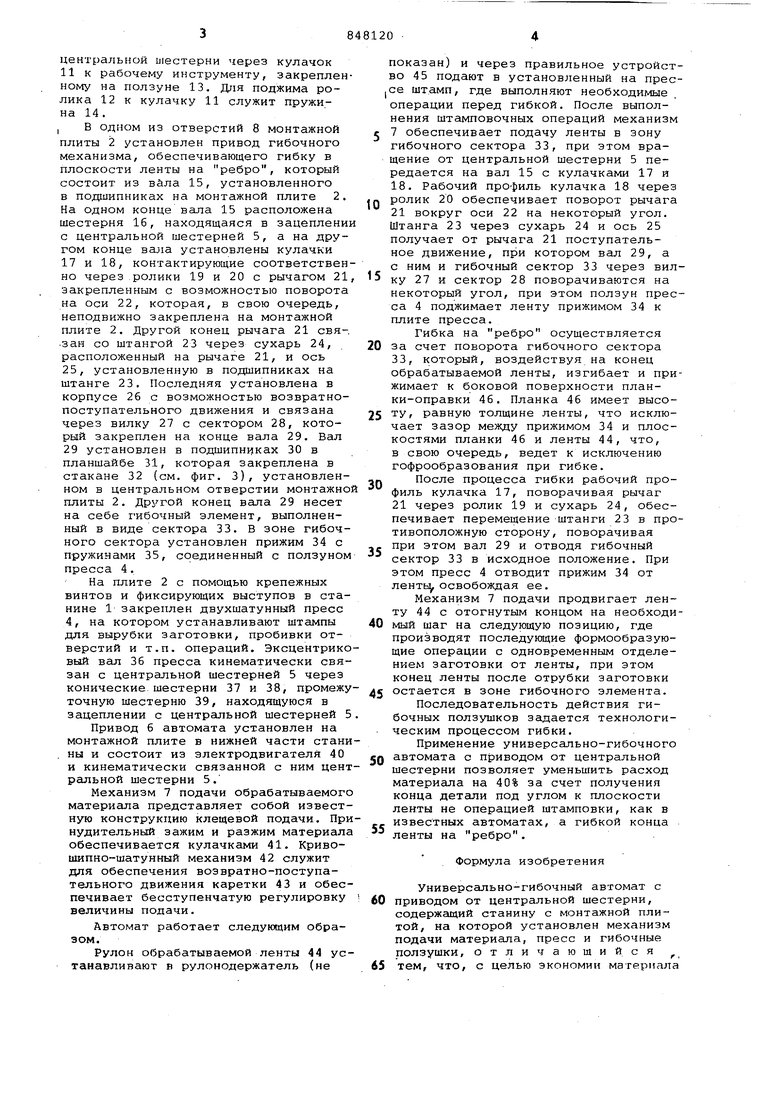
Изобретение относится к обработке металлов давлением, а именно к технологическому оборудованию для осуществления гибочных операций. Известен универсально-гибочный автомат с приводом от центральной шестерни, содержащий станину с монтажной плитой, на которой установле механизм подачи материала, пресс и гибочные ползушки. В автомате при и готовлении деталей с концом под некоторым углом к плоскости ленты заложена операция вырубки заготовок f Однако при вырубке заготовок используют ленту шириной большей, чем ширина самой детали и большее количество материала идет в отход. Цель изобретения - экономия мате риала и расширение технологических возможностей автомата. Поставленная цель достигается тем, что универсально-гибочный авто мат с приводом от центральной шесте ни, содержащий станину с монтажной плитой, на которой установлен механизм подачи материала, пресс и гибо ные ползушки, снабжен механизмом ги ки на ребро, выполненным в виде поворотного гибочного сектора, смонти рованного на валу, кинематически св занном с центральной шестерней, и подпружиненного прижима, кинематически связанного с ползуном пресса. На фиг. 1 показана кинематическая схема автомата; на фиг. 2 - узел на фиг. 1; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - разрез по оси прижима. Универсально гибочный автомат состоит из станины 1 с установленной на ней монтажной плитой 2, гибочных агрегатных ползушек 3,.пресса 4,центральной шестерни 5 с. приводом б и механизма 7 подачи обрабатываемого материала. На монтажной плите 2 выполнены расположенные по окружности отверстия 8 для установки сменных гибочных ползушек 3 вокруг центральной шестерни 5. Гибочные ползушки 3 состоят из неподвижно закрепленного на монтажной плите 2 основания 9, установленного в подшипниках в основании 9 вала 10, на одном конце которого закреплена шестерня (не показана), находящаяся в зацеплении с центрашьной шестерней 5, а на другом установлен кулачок 11, контактирующий с роликом 12, который закреплен на ползуне 13 и служит для передачи движения от
центральЕ1ой шестерни через кулачок 11 к рабочему инструменту, закрепленному на ползуне 13. Для поджима ролика 12 к кулачку 11 служит пружина 14.
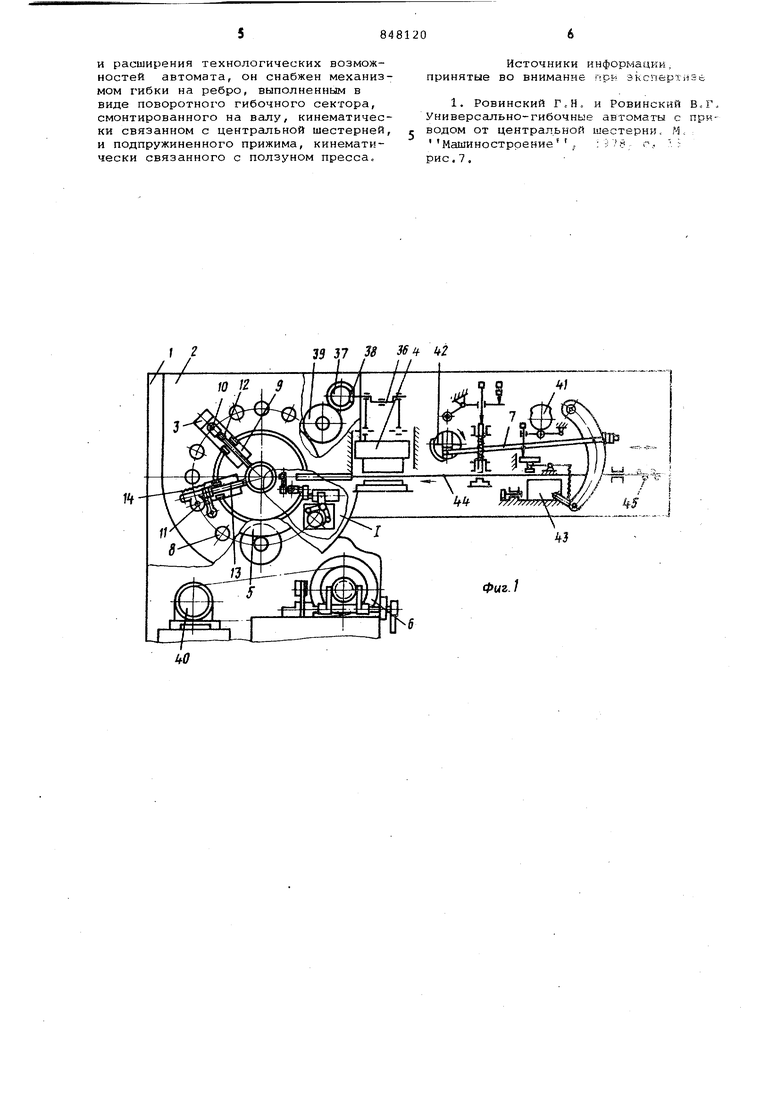
I В одном из отверстий 8 монтажной плиты 2 установлен привод гибочного механизма, обеспечивающего гибку в плоскости ленты на ребро, который состоит из вила 15, установленного в подшипниках на монтажной плите 2. На одном конце вала 15 расположена шестерня 16, находящаяся в зацеплении с центральной шестерней 5, а на другом конце вала установлены кулачки 17 и 18, контактирующие соответственно через ролики 19 и 20 с рычагом 21 закрепленным с возможностью поворота на оси 22, которая, в свою очередь, неподвижно закреплена на монтажной плите 2. Другой конец рычага 21 свя-. зав со штангой 23 через сухарь 24, расположенный на рычаге 21, и ось 25, установленную в подшипниках на штанге 23. Последняя установлена в корпусе 26 с возможностью возвратнопоступательного движения и связана через вилку 27 с сектором 28, который закреплен на конце вала 29. Вал 29 установлен в подшипниках 30 в планшайбе 31, которая закреплена в стакане 32 (см. фиг. 3), установленном Б центральном отверстии монтажно плиты 2. Другой конец вала 29 несет на себе гибочный элемент, выполненный в виде сектора 33. В зоне гибочного сектора установлен прижим 34 с пружинами 35, соединенный с ползуном пресса 4.
На плите 2 с помощью крепежных винтов и фиксирующих выступов в станине 1 закреплен двухшатунный пресс 4, на котором устанавливают штампы для вырубки заготовки, пробивки отверстий и т.п. операций. Эксцентриковый вал 36 пресса кинематически связан с центральной шестерней 5 через конические шестерни 37 и 38, промежуточную шестерню 39, находящуюся в зацеплении с центргшьной шестерней 5
Привод 6 автомата установлен на монтажной плите в нижней части станины и состоит из электродвигателя 40 и кинематически связанной с ним центральной шестерни 5.
Механизм 7 подачи обрабатываемого материала представляет собой известную конструкцию клещевой подачи. Принудительный зажим и разжим материала обеспечивается кулачками 41. Кривошип но-шат у нный механизм 42 служит для обеспечения возвратно-поступательного движения каретки 43 и обеспечивает бесступенчатую регулировку величины подачи.
Автомат работает следующим образом.
Рулон обрабатываемой ленты 44 устанавливают в рулонодержатель (не
показан) и через правильное устройство 45 подают в установленный на прессе штамп, где выполняют необходимые операции перед гибкой. После выполнения штамповочных операций механизм 7 обеспечивает подачу ленты в зону гибочного сектора 33, при этом вращение от центральной шестерни 5 передается на вал 15 с кулачками 17 и 18. Рабочий профиль кулачка 18 через ролик 20 обеспечивает поворот рычага 21 вокруг оси 22 на некоторый угол. Штанга 23 через сухарь 24 и ось 25 получает от рычага 21 поступательное движение, при котором вал 29, а с ним и гибочный сектор 33 через вилку 27 и сектор 28 поворачиваются на некоторый угол, при этом ползун пресса 4 поджимает ленту прижимом 34 к плите пресса.
Гибка на ребро осуществляется за счет поворота гибочного сектора 33, который, воздействуя на конец обрабатываемой ленты, изгибает и прижимает к боковой поверхности планки-оправки 46. Планка 46 имеет высоту, равную толщине ленты, что исключает зазор между прижимом 34 и плоскостями планки 46 и ленты 44, что, в свою очередь, ведет к исключению гофрообразования при гибке.
После процесса гибки рабочий профиль кулачка 17, поворачивая рычаг 21 через ролик 19 и сухарь 24, обеспечивает перемещение штанги 23 в противоположную сторону, поворачивая при этом вал 29 и отводя гибочный сектор 33 в исходное положение. При этом пресс 4 отводит прижим 34 от ленть освобождая ее.
Механизм 7 подачи продвигает ленту 44 с отогнутым концом на необходимый шаг на следующую позицию, где производят последующие формообразующие операции с одновременным отделением заготовки от ленты, при этом конец ленты после отрубки заготовки остается в зоне гибочного элемента.
Последовательность действия гибочных ползушков задается технологическим процессом гибки.
Применение универсально-гибочного автомата с приводом от центральной шестерни позволяет уменьшить расход материала на 40% за счет получения конца детали под углом к плоскости ленты не операцией штамповки, как в известных автоматах, а гибкой конца ленты на ребро.
Формула изобретения
Универсально-гибочный автомат с приводом от центральной шестерни, содержащий станину с монтажной плитой, на которой установлен механизм подачи материала, пресс и гибочные ползушки, отличающийся тем, что, с целью экономии материала
и расширения технологических возможностей автомата, он снабжен механизмом гибки на ребро, выполненным в виде поворотного гибочного сектора, смонтированного на вашу, кинематически связанном с центральной шестерней, и подпружиненного прижима, кинематически связанного с ползуном пресса.
Источники информации. принятые во внимание гфи эксперт иэе
1. Ровинский Г,-Н. и Ровинский ВЛ Универсально-гибочные автоматы с приводом от центральной шестерни, М, Машиностроение ,, : j /8 г,. ; рис.7.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНО-ГИБОЧНЫЙ АВТОМАТ | 1991 |
|
RU2030945C1 |
| Универсально-гибочный автомат для изготовления деталей малых серий | 1988 |
|
SU1637891A1 |
| Универсально-гибочный автомат | 1982 |
|
SU1079335A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Многопозиционный штамповочный автомат | 1980 |
|
SU1013302A1 |
| Цепевязальный автомат с кантователем вертикального исполнения | 1986 |
|
SU1383571A1 |
| Механический пресс-автомат | 1973 |
|
SU460193A1 |
| ЛИСТОШТАМПОВОЧНЫЙ ПРЕСС-АВТОМАТ | 2006 |
|
RU2341372C2 |
| Автомат универсально-гибочный, штамповочный, модульного типа | 1989 |
|
SU1813585A1 |
| Автомат для изготовления мелких изделий профильного сечения | 1977 |
|
SU778880A1 |
39 37 3S 36 ijkt
