(54) МАЛЬТИЙСКИЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Мальтийский механизм | 1976 |
|
SU580390A1 |
| МАЛЬТИЙСКИЙ МЕХАНИЗМ | 1965 |
|
SU167721A1 |
| Мальтийский механизм | 1975 |
|
SU624030A1 |
| Кулисный механизм | 1977 |
|
SU663917A1 |
| Механизм поворота шпиндельного барабана токарного многошпиндельного автомата | 1983 |
|
SU1189582A1 |
| Устройство для обработки кулачков | 1979 |
|
SU795753A1 |
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| Мальтийский механизм | 1988 |
|
SU1518607A1 |
| Мальтийский механизм | 1984 |
|
SU1260617A1 |
| Механизм поворота шпиндельного барабана многошпиндельного токарного автомата | 1974 |
|
SU560731A1 |
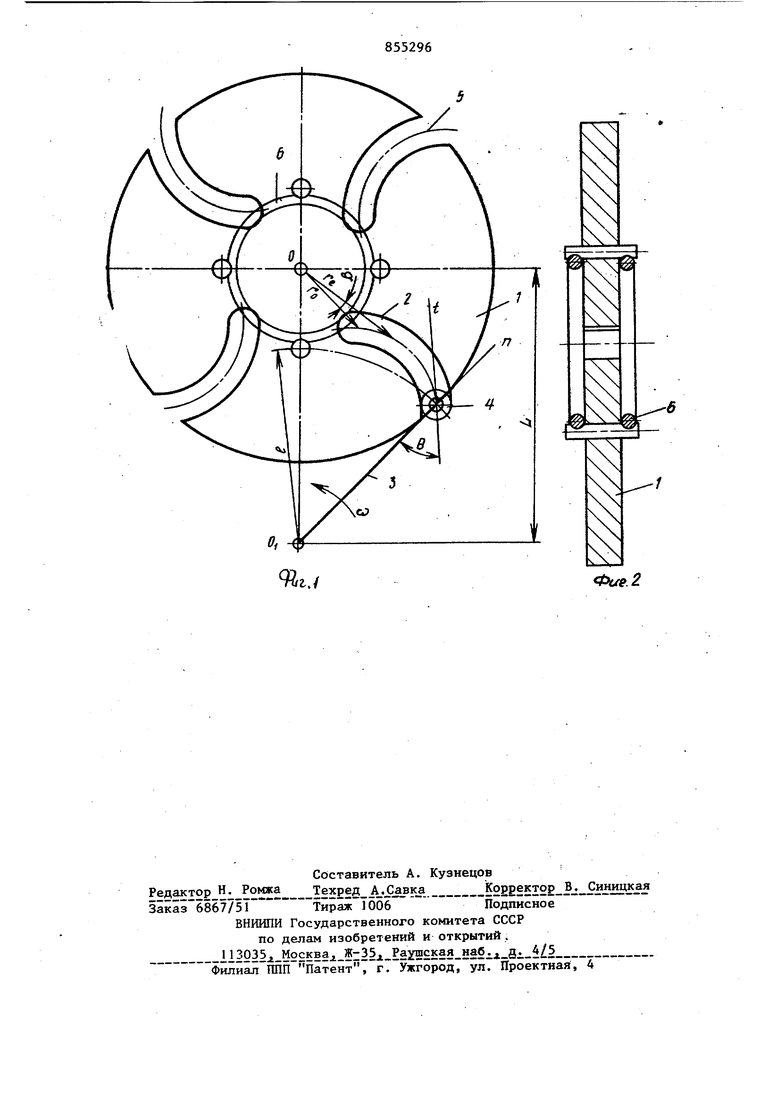
Изобретение относится к машиностроению и может быть использовано для осуществления дискретного поворота исполнительных органов . Известен мальтийский механизм, содержащий мальтийский крест с пазами криволинейного профиля и кривошип с пальцем, взаимодействующим с пазами ОД. Недостатком данного механизма явля ется то, что при повышенных скоростях он не обеспечивает требуемых динамических характеристик. По основному авт.св. СССР № 580390 известен мальтийский механизм, содержащий мальтийский крест с пазами криволинейного профиля, кривошип с пальцем, взаимодействующим с пазами, а профили пазов выполнены по кривой, определяемой формулой р, arctg - t - arctg n, - переменчьи угол между минимальным (начальным) радиусом-вектором (гр ) средней линии паза и ее текущим радиусом-вектором (Г:), исходящими из центра креста; отношение радиуса кривошипа () к расстоянию между осями, вращения кривошипа и креста (L); условные обозначения, введенные для сокращения записи формулы, 4- -JtMl-tK)-. NTpirrrno ln(t tg& -1), 1, ij угол давления, образованный перпендикуляром к направлению движения кривошипа и касательной к средцней линии профиля . --1-tgЧ Д(,. -tg4 il-K)t, г..о(Гс Если , j.. e I j±MLm ± I vxa 1 (. k) С - постоянная интегрирования, на ходится из начальных условий |Ь О и q Го 2j. Однако 14еха-низм характеризуется невысокой надежностью вследствие появления ударов в конце кривой профиля , приводящих к мгновенным пиковым ускорениям. Цель изобретения - повышение надежности механизма. Указанная цель достигается тем, что механизм снабжен упругим элемен том, установленным на мальтийском кресте и взаимодействующим с пальцем кривошипа на конечных его перемещения. На фиг. 1 схематически изображен мальтийский механизм, общий вид; на фиг, 2 - крепление упругих элементов Мальтийский механизм содержит мал тийский крест 1 с пазами 2 криволине ного профиля, кривощип 3 с пальцем 4 взаимодействующим с пазами 2, профил которых выполнен по кривой, опрёдел рмой формулой где - переменный угол между минимальным (начальным) радиусом вектором (гр) средней линии паза 2 и ее текущим радиусом вектором (г- ), исходящим из центра креста 1. 64 На кресТе 1 установлен упругий элемент 6, взаимодействующий с пальцем 4 кривошипа 3 на конечных участках его перемещения. Мальтийский механизм работает следующим образом. При вращении кривошипа 3 с постоянной скоростью его палец 4 в определенный момент времени входит в паз 2 мальтийского креста 1, поворачивая его на угол, равный , где 2 - число пазов креста 1. В конце профиля паза 2 пиковые ускорения сглаживаются упругим элементом 6. Фиксация мальтийского креста I в период его остановки после выхода пальца 4 кривошипа 3 из паза 2 ос цествляется обычным образом с помощью фиксирующего диска, жестко связанного с кривошипом, и фиксирующих выемок, выполненных на мальтийском кресте (не показаны). Предлагаемое техническое решение повьщ1ает надежность мальтийского механизма за счет сглаживания пиковых ускорений. Формула изобретения Мальтийский механизм по авт.св.СССР № 580390, о т л ичающийся тем, что, с целью повышения надежности, он снабжен упругим элементом, установленным на мальтийском кресте и взаимодействующим с пальцем кривошипа на конечных участках его перемещения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 167721, кл. F 16 Н 27/06, 1962. 2.Авторское свидетельство СССР № 580390, кл. F 16 Н 27/06, 1976 прототип).
Si
ш
vf
tj
Фие2
