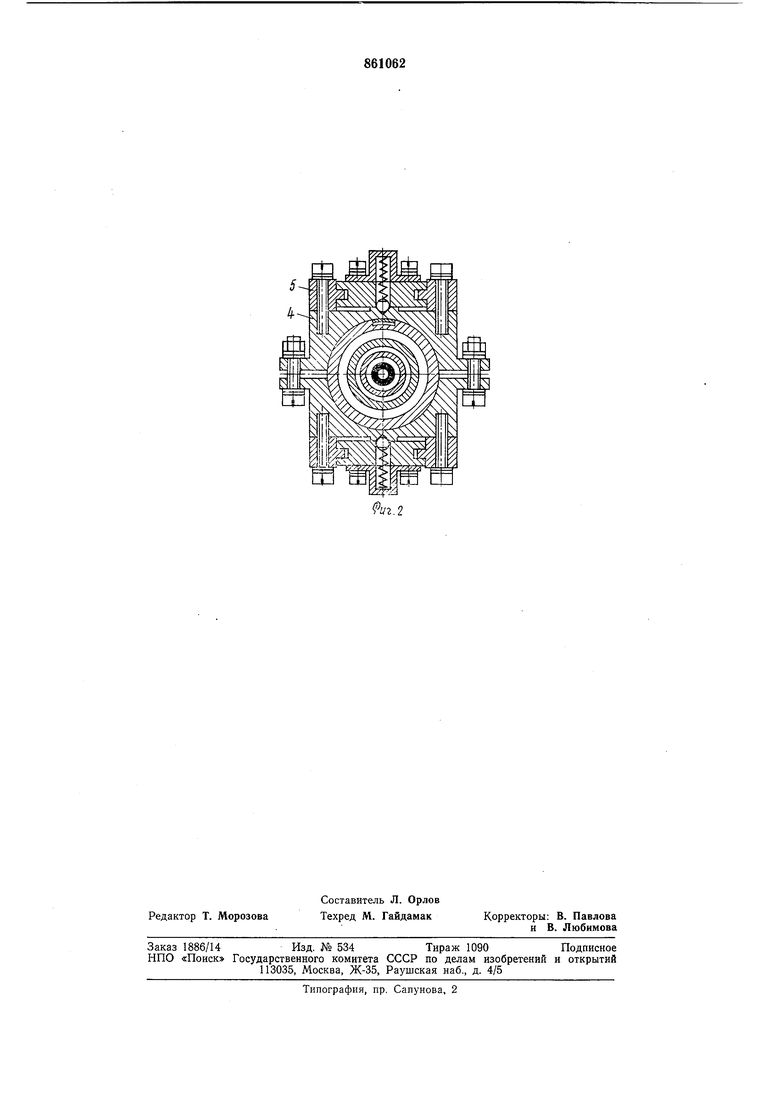
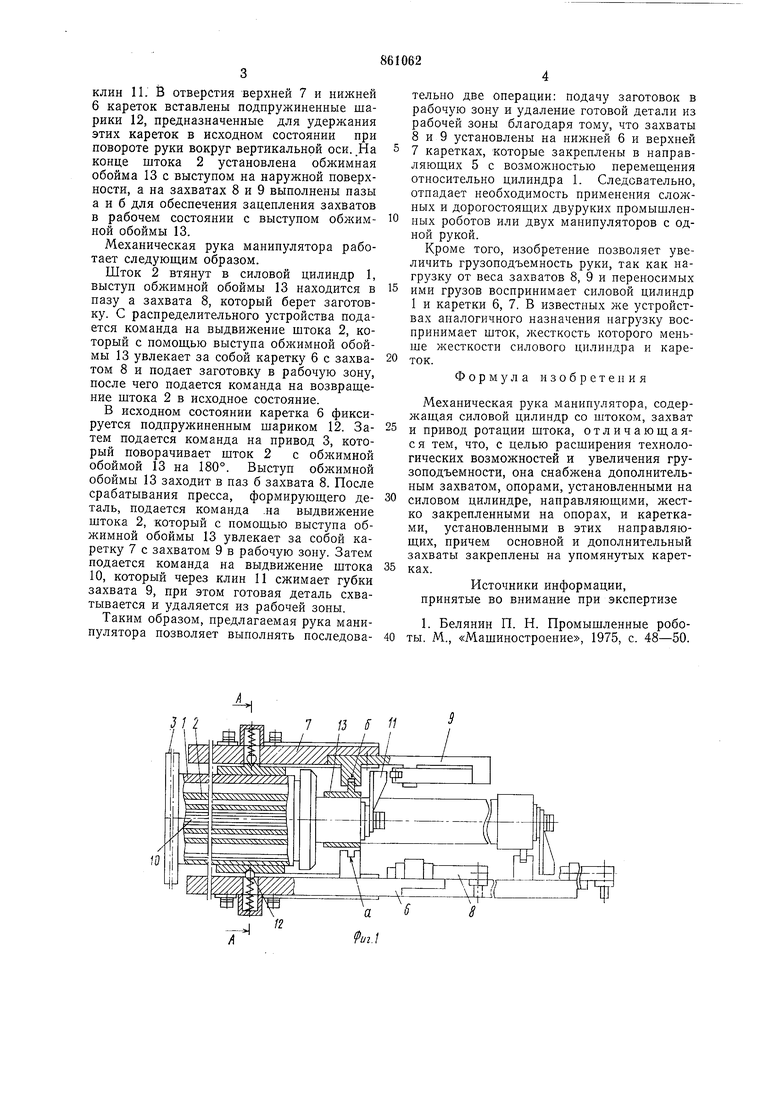
Изобретение относится к оборудованию для механизации и автоматизации вспомогательных технологических операций и может быть применено в штамповочных цехах на операциях подачи заготовок в рабочую зону и последующего удаления готовой детали из рабочей зоны, а также на сборочных операциях для подачи различных по форме и материалам деталей. Известна механическая рука манипулятора, содержащая силовой цилиндр с щтоком, захват и привод ротации штока 1. Недостатком известного устройства является наличие лишь одного захвата, который позволяет либо подавать заготовку в рабочую зону, либо удалять готовую деталь из рабочей зоны. Кроме того, мала грузоподъемность, так как она определяется допустимой нагрузкой, которую воспринимает шток руки в выдвинутом положении. И поскольку захват установлен на конце штока, то нагрузку от его веса и веса переносимого им груза воспринимает шток руки. А при выдвинутом положении штока незначительное усилие на его конце создает большой изгибающий момент. Целью изобретения является расщирение технологических возможностей и увеличение грузоподъемности. Для достижения поставленной цели механическая рука манипулятора снабжена дополнительным захватом, опорами, установленными на силовом цилиндре, направляющими, жестко закрепленными на опорах, и каретками, установленными в этих направляющих, причем основной и дополнительный захваты закреплены на упомянутых каретках. На фиг. 1 схематически изображена механическая рука манипулятора; на фиг. 2- разрез А-А на фиг. 1. Механическая рука манипулятора состоит из силового цилиндра 1, в котором установлен шток 2. К фланцу цилиндра 1 прикреплен привод 3 для поворота щтока 2 вокруг оси. На цилиндре 1 установлены и стянз ты друг с другом четырьмя винтами две опоры 4 (см. фиг. 2), на горизонтальных поверхностях которых жестко закреплены направляющие 5. В направляющих 5 установлены нижняя 6 и верхняя 7 каретки, к которым жестко прикреплены вакуумный захват 8 для подачи плоских заготовок в рабочую зону и дополнительный рычажный захват 9 для удаления готовой детали из рабочей зоны. Для перемещения губок рычажного захвата 9 друг относительно друга, на конце штока 10, установленного внутри штока 2, закреплен
клин 11. в отверстия верхней 7 и нижней 6 кареток вставлены подпружиненные шарики 12, предназначенные для удержания этих кареток в исходном состоянии при повороте руки вокруг вертикальной оси. .На конце штока 2 установлена обжимная обойма 13 с выступом на наружной поверхности, а на захватах 8 и 9 выполнены пазы а и б для обеспечения зацепления захватов в рабочем состоянии с выступом обжимной обоймы 13.
Механическая рука манипулятора работает следующим образом.
Шток 2 втянут в силовой цилиндр 1, выступ обжимной обоймы 13 находится в пазу а захвата 8, который берет заготовку. С распределительного устройства подается команда на выдвижение штока 2, который с помош,ью выступа обжимной обоймы 13 увлекает за собой каретку б с захватом 8 и подает заготовку в рабочую зону, после чего подается команда на возвращение штока 2 в исходное состояние.
В исходном состоянии каретка 6 фиксируется подпружиненным шариком 12. Затем подается команда на привод 3, который поворачивает шток 2 с обжимной обоймой 13 на 180°. Выступ обжимной обоймы 13 заходит в паз б захвата 8. После срабатывания пресса, формирующего деталь, подается команда .на выдвижение штока 2, который с помощью выступа обжимной обоймы 13 увлекает за собой каретку 7 с захватом 9 в рабочую зону. Затем подается команда на выдвижение штока 10, который через клин II сжимает губки захвата 9, при этом готовая деталь схватывается и удаляется из рабочей зоны.
Таким образом, предлагаемая рука манипулятора позволяет выполнять последовательно две операции: подачу заготовок в рабочую зону и удаление готовой детали из рабочей зоны благодаря тому, что захваты 8 и 9 установлены на нижней 6 и верхней 7 каретках, которые закреплены в направляющих 5 с возможностью перемещения относительно цилиндра 1. Следовательно, отпадает необходимость применения сложных и дорогостоящих двуруких промышленных роботов или двух манипуляторов с одной рукой.
Кроме того, изобретение позволяет увеличить грузоподъемность руки, так как нагрузку от веса захватов 8, 9 и переносимых ими грузов воспринимает силовой цилиндр 1 и каретки 6, 7. В известных же устройствах аналогичного назначения нагрузку воспринимает шток, жесткость которого меньше жесткости силового цилиндра и кареток.
Формула изобретения
Механическая рука манипулятора, содержащая силовой цилиндр со штоком, захват и привод ротации штока, отличающаяся тем, что, с целью расширения технологических возможностей и увеличения грузоподъемности, она снабжена дополнительным захватом, опорами, установленными на силовом цилиндре, направляющими, жестко закрепленными на опорах, и каретками, установленными в этих направляющих, причем основной и дополнительный захваты закреплены на упомянутых каретках.
Источники информации,
принятые во внимание при экспертизе
1. Белянин П. Н. Промышленные роботы. М., «Машиностроение, 1975, с. 48-50.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для автоматической смены инструментов | 1986 |
|
SU1393578A1 |
| Манипулятор | 1978 |
|
SU973351A2 |
| Устройство для изготовления петель | 1986 |
|
SU1444041A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор к штамповочному прессу | 1981 |
|
SU1006029A1 |
| Манипулятор для автоматической смены инструмента | 1986 |
|
SU1404247A2 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Автоматизированный штамповочный комплекс | 1986 |
|
SU1375398A1 |
| Рука манипулятора | 1987 |
|
SU1505772A1 |